TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121757
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024017434
出願日
2024-02-07
発明の名称
演算装置、演算方法
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H04N
23/695 20230101AFI20250813BHJP(電気通信技術)
要約
【課題】 追尾対象の被写体が移動した場合には、該被写体を目標の位置やサイズにより近づけやすくさせるための技術を提供することができる。
【解決手段】 撮像装置による撮影画像から検出された被写体の検出位置が、該撮影画像における該被写体の目標位置に近づくように該撮像装置の姿勢を制御するための制御速度を算出する。該算出では、検出位置と目標位置との差分が第1閾値以上の状態では、姿勢の制御速度として第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ該第1閾値よりも小さい第2閾値以上となった場合には、姿勢の制御速度として該第1制御速度よりも速い第2制御速度を該差分に応じて算出する。
【選択図】 図1
特許請求の範囲
【請求項1】
撮像装置による撮影画像から検出された被写体の検出位置が、該撮影画像における該被写体の目標位置に近づくように該撮像装置の姿勢を制御するための制御速度を算出する算出手段を備え、
前記算出手段は、
前記検出位置と前記目標位置との差分が第1閾値以上の状態では、前記姿勢の制御速度として第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ該第1閾値よりも小さい第2閾値以上となった場合には、前記姿勢の制御速度として該第1制御速度よりも速い第2制御速度を該差分に応じて算出する
ことを特徴とする演算装置。
続きを表示(約 1,200 文字)
【請求項2】
前記算出手段は、前記差分が前記第2閾値未満であれば、前記姿勢の制御速度を0とすることを特徴とする請求項1に記載の演算装置。
【請求項3】
前記算出手段は、前記差分が前記第2閾値未満の状態の後、該差分が前記第1閾値未満かつ前記第2閾値以上となった場合には、前記姿勢の制御速度として前記第1制御速度を該差分に応じて算出することを特徴とする請求項1に記載の演算装置。
【請求項4】
さらに
前記算出手段により算出された制御速度に応じて前記姿勢を制御する制御手段を備えることを特徴とする請求項1に記載の演算装置。
【請求項5】
さらに、
前記算出手段により算出された制御速度を前記撮像装置に対して送信する送信手段を備えることを特徴とする請求項1に記載の演算装置。
【請求項6】
前記算出手段は、前記撮像装置の姿勢の制御速度が閾値未満の場合、前記差分が前記第1閾値以上の状態では、前記姿勢の制御速度として前記第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ前記第2閾値以上となった場合には、前記姿勢の制御速度として前記第2制御速度を該差分に応じて算出することを特徴とする請求項1に記載の演算装置。
【請求項7】
前記算出手段は、前記撮像装置の姿勢の制御速度が閾値以上の場合、前記姿勢の制御速度として前記第1制御速度を前記差分に応じて算出することを特徴とする請求項1に記載の演算装置。
【請求項8】
前記算出手段は、前記差分が前記第2閾値未満の状態の後、該差分が前記第1閾値未満かつ前記第2閾値以上となった場合には、前記姿勢の制御速度を0とすることを特徴とする請求項1に記載の演算装置。
【請求項9】
撮像装置による撮影画像から検出された被写体の検出サイズが、該撮影画像における該被写体の目標サイズに近づくように該撮像装置のズームを制御するための制御速度を算出する算出手段を備え、
前記算出手段は、
前記検出サイズと前記目標サイズとの差分が第1閾値以上の状態では、前記ズームの制御速度として第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ該第1閾値よりも小さい第2閾値以上となった場合には、前記ズームの制御速度として該第1制御速度よりも速い第2制御速度を該差分に応じて算出する
ことを特徴とする演算装置。
【請求項10】
前記算出手段は、前記撮像装置のズームの制御速度が閾値未満の場合、前記差分が前記第1閾値以上の状態では、前記ズームの制御速度として前記第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ前記第2閾値以上となった場合には、前記ズームの制御速度として前記第2制御速度を該差分に応じて算出することを特徴とする請求項9に記載の演算装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、追尾撮影のための演算技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
一般に、PTZカメラとよばれるパン・チルト・ズームを調節することが可能なカメラにおいて、ユーザから指定された追尾対象となる被写体(以下、追尾被写体と称する)を撮影画像から検出して追尾撮影する技術が知られている。係る追尾技術では、追尾被写体を撮影構図における目標の位置(以下、目標位置と称する)に捉え続けるようにパン・チルト・ズームを自動的に制御する。この時、追尾被写体の移動速度等に基づいて、複数の制御モードから適切なモードを選択することで、速度の異なる被写体の追尾撮影が可能となる。特許文献1では、少なくとも2つの制御モードを有し、追尾被写体の移動速度に基づいて制御モードを切り替えることで、低速から高速までの幅広い速度域の被写体でも追尾撮影し続ける方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-68183号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
追尾技術では、微小な被写体の動きにまで追従し過ぎてしまうと映像品位が良くないという課題がある。そのため、一般的には、追尾被写体が目標位置に近づくにつれカメラのパン・チルト・ズームの速度を小さくし、追尾被写体が目標位置から一定距離に近づいた場合にパン・チルト・ズーム動作を止める制御(以下、不感帯制御と称する)をしている。これにより、被写体がその場で揺れたり、被写体が僅かに動いたりするような場合の品位改善がなされている。
【0005】
しかしながら、上記の不感帯制御を行うと、目標位置近傍でパン・チルト・ズームの速度が小さい、若しくは止まってしまい、追尾被写体が目標位置に到達しない、あるいは到達が遅くなるといった別の課題が生じてしまう。その結果、追尾被写体が歩くなどして移動量が大きい場合では、カメラのパン・チルト・ズームの速度を大きくしたにも関わらず追尾被写体が目標位置に到達しない、あるいは到達が遅いため、映像品位が悪くなってしまう。
【0006】
特許文献1の方法では、追尾被写体の速度が定速の場合にモードの切り替えが行えないため、追尾被写体の速度が低速の場合には追尾被写体が目標位置に到達できない恐れがある。本発明では、追尾対象の被写体が移動した場合には、該被写体を目標の位置やサイズにより近づけやすくさせるための技術を提供する。
【課題を解決するための手段】
【0007】
本発明の一様態は、撮像装置による撮影画像から検出された被写体の検出位置が、該撮影画像における該被写体の目標位置に近づくように該撮像装置の姿勢を制御するための制御速度を算出する算出手段を備え、前記算出手段は、前記検出位置と前記目標位置との差分が第1閾値以上の状態では、前記姿勢の制御速度として第1制御速度を該差分に応じて算出し、該状態の後、該差分が該第1閾値未満かつ該第1閾値よりも小さい第2閾値以上となった場合には、前記姿勢の制御速度として該第1制御速度よりも速い第2制御速度を該差分に応じて算出することを特徴とする。
【発明の効果】
【0008】
本発明の構成によれば、追尾対象の被写体が移動した場合には、該被写体を目標の位置やサイズにより近づけやすくさせることができる。
【図面の簡単な説明】
【0009】
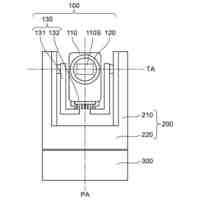
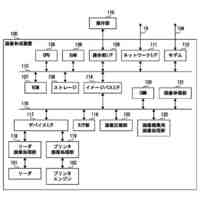
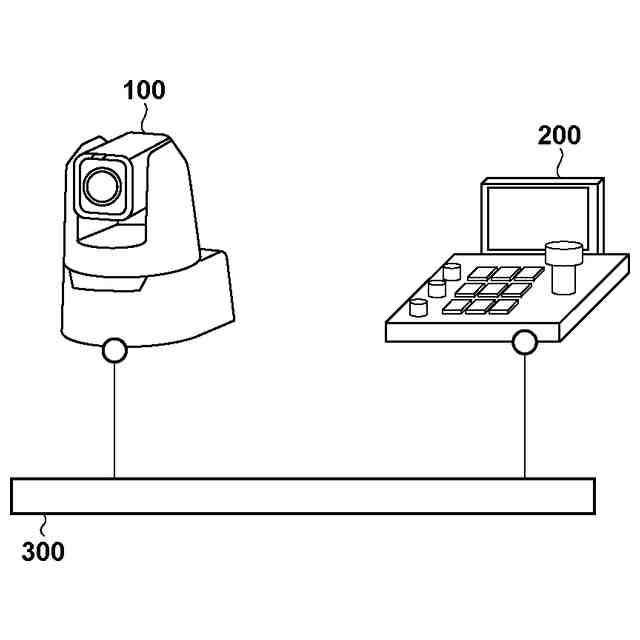
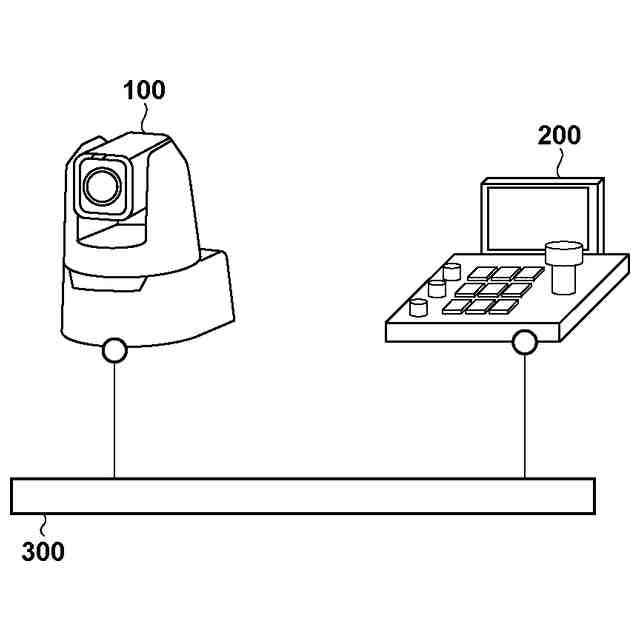
システムの構成例を示す図。
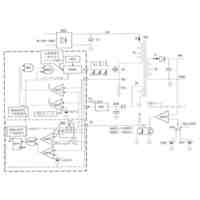
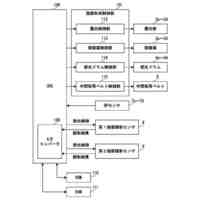
カメラ100およびコントローラ200のそれぞれのハードウェア構成例を示すブロック図。
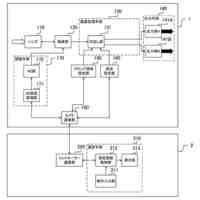
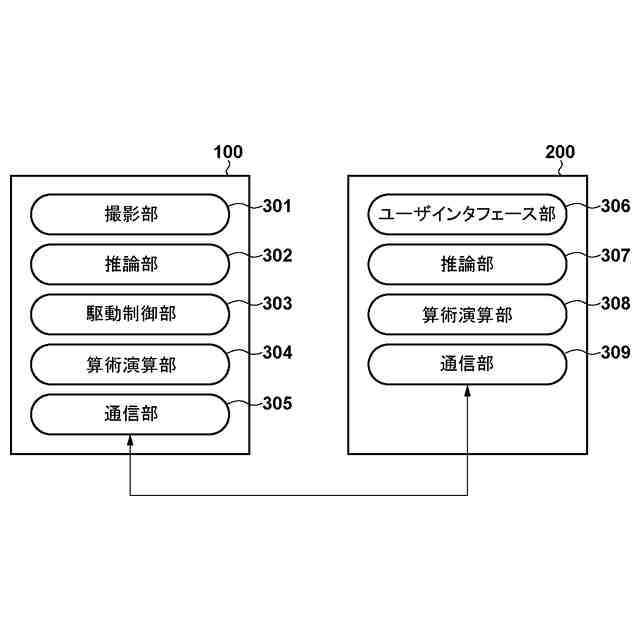
カメラ100およびコントローラ200のそれぞれにおけるソフトウェア(コンピュータプログラム)の構成例を示すブロック図。
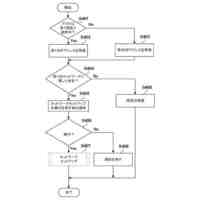
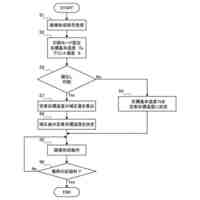
(a)は、カメラ100の動作のフローチャート、(b)は、コントローラ200の動作のフローチャート。
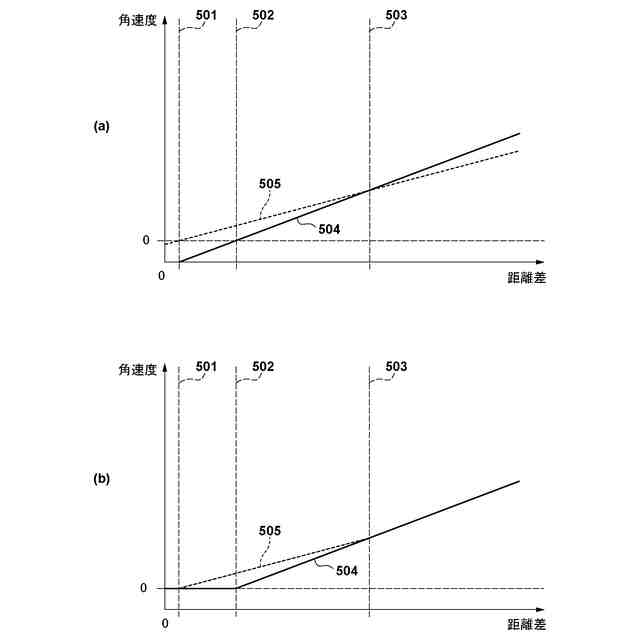
(a)は、距離差と角速度の関係から成るグラフ、(b)は、距離差と角速度との対応関係を示す図。
(a)は、撮影画像の表示例を示す図、(b)は、ユーザが新たな目標位置を設定している様子を示す図。
(a)は、カメラ100のハードウェア構成例を示すブロック図、(b)は、カメラ100におけるソフトウェア(コンピュータプログラム)の構成例を示すブロック図。
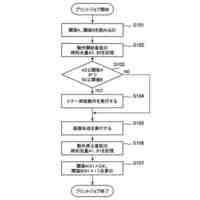
(a)は、カメラ100の動作のフローチャート、(b)は、コントローラ200の動作のフローチャート。
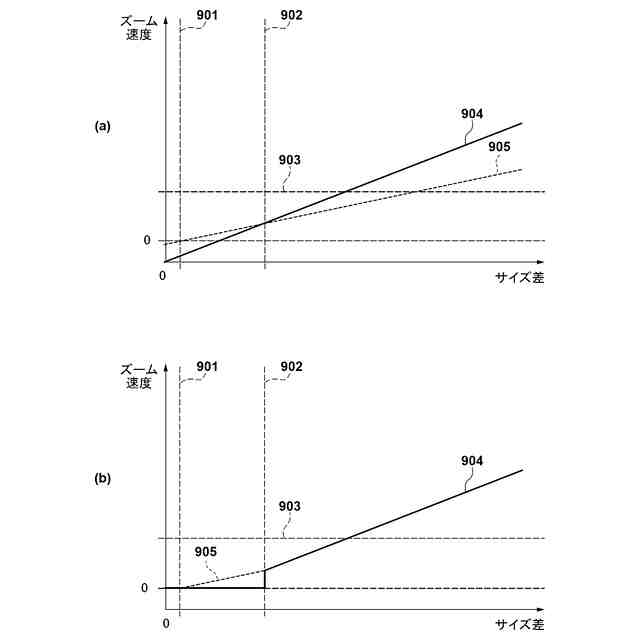
(a)は、サイズ差とズーム速度の関係から成るグラフ、(b)は、サイズ差とズーム速度との対応関係を示す図。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して実施形態を詳しく説明する。尚、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
移動体
8日前
キヤノン株式会社
現像装置
18日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
発光装置
2日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
発光装置
7日前
キヤノン株式会社
電源装置
23日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
通信端末
1か月前
キヤノン株式会社
光学機器
2日前
キヤノン株式会社
乳酸センサ
14日前
キヤノン株式会社
レンズ装置
21日前
キヤノン株式会社
プログラム
24日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
29日前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
画像形成装置
22日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
電子写真装置
15日前
キヤノン株式会社
撮像システム
1か月前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
画像形成装置
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ