TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124872
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2025094613,2022558737
出願日
2025-06-06,2020-10-30
発明の名称
ロボットシステム
出願人
株式会社ニコン
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250819BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物の距離に関する情報を取得する、ロボットシステムを提供する。
【解決手段】可動部を有するロボットアームを有するロボットシステムであって、前記ロボットアームに取り付けられた第1撮像装置および第2撮像装置と、前記ロボットシステムを制御する制御部と、対象物の距離に関する情報を取得する距離情報取得部を有し、前記制御部は、前記第1撮像装置または前記第2撮像装置の少なくとも一方を移動することで前記第1撮像装置と前記第2撮像装置との間の距離である基線長を変更可能であり、前記距離情報取得部は、前記基線長に基づいて前記対象物の距離に関する情報を取得する。
【選択図】図5
特許請求の範囲
【請求項1】
可動部を有するロボットアームを有するロボットシステムであって、
前記ロボットアームに取り付けられた第1撮像装置および第2撮像装置と、
前記ロボットシステムを制御する制御部と、
対象物の距離に関する情報を取得する距離情報取得部を有し、
前記制御部は、前記第1撮像装置または前記第2撮像装置の少なくとも一方を移動することで前記第1撮像装置と前記第2撮像装置との間の距離である基線長を変更可能であり、
前記距離情報取得部は、前記基線長に基づいて前記対象物の距離に関する情報を取得する、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
撮像装置を備えるロボットシステムが知られている。例えば、特許文献1には、ロボットアームに撮像装置が取り付けられた構成が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-131685号公報
【発明の概要】
【0004】
本発明のロボットシステムの一つの態様は、可動部を有するロボットアームを有するロボットシステムであって、前記ロボットアームに取り付けられた第1撮像装置および第2撮像装置と、前記ロボットシステムを制御する制御部と、対象物の距離に関する情報を取得する距離情報取得部を有し、前記制御部は、前記第1撮像装置または前記第2撮像装置の少なくとも一方を移動することで前記第1撮像装置と前記第2撮像装置との間の距離である基線長を変更可能であり、前記距離情報取得部は、前記基線長に基づいて前記対象物の距離に関する情報を取得する、ロボットシステム。
【図面の簡単な説明】
【0005】
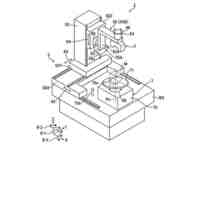
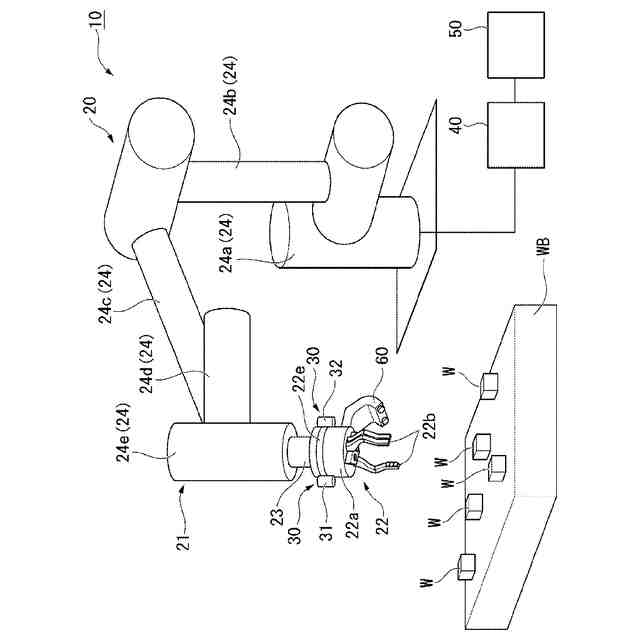
図1は、第1実施形態のロボットシステムを示す斜視図である。
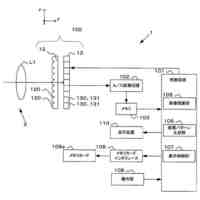
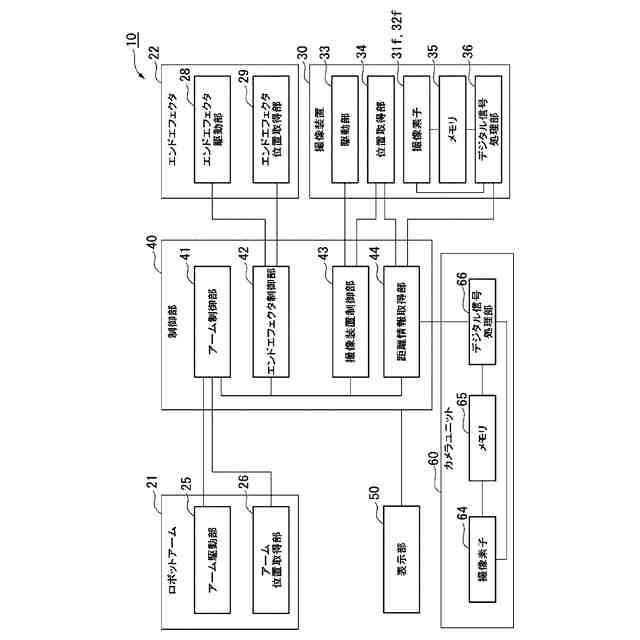
図2は、第1実施形態のロボットシステムの構成の一部を示すブロック図である。
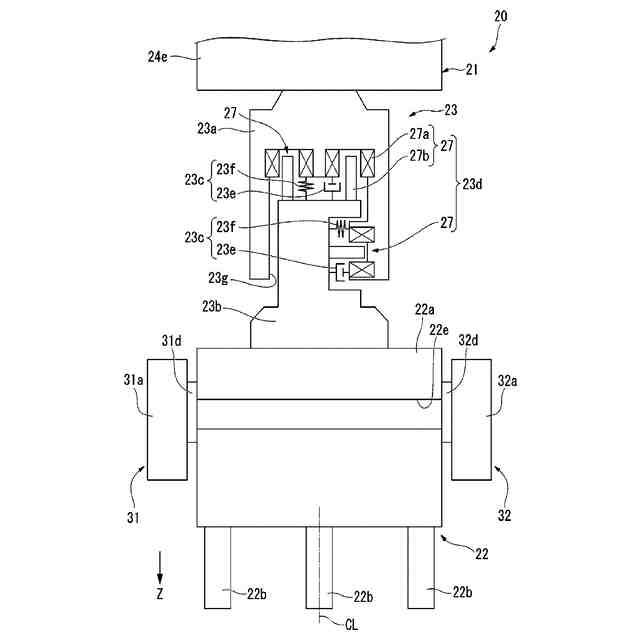
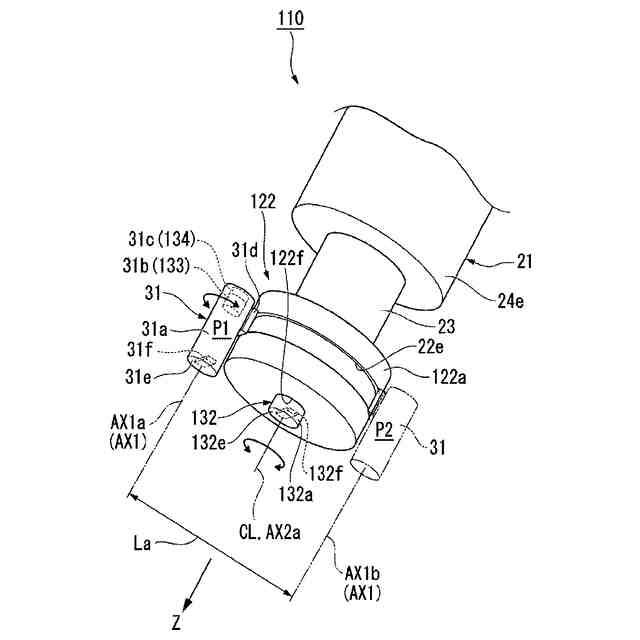
図3は、第1実施形態のロボットアームの一部、エンドエフェクタ、アダプタ、および撮像装置を示す斜視図である。
図4は、第1実施形態のロボットアームの一部、エンドエフェクタ、アダプタ、および撮像装置を示す平面図である。
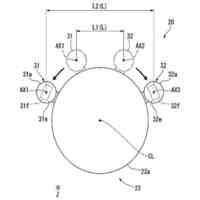
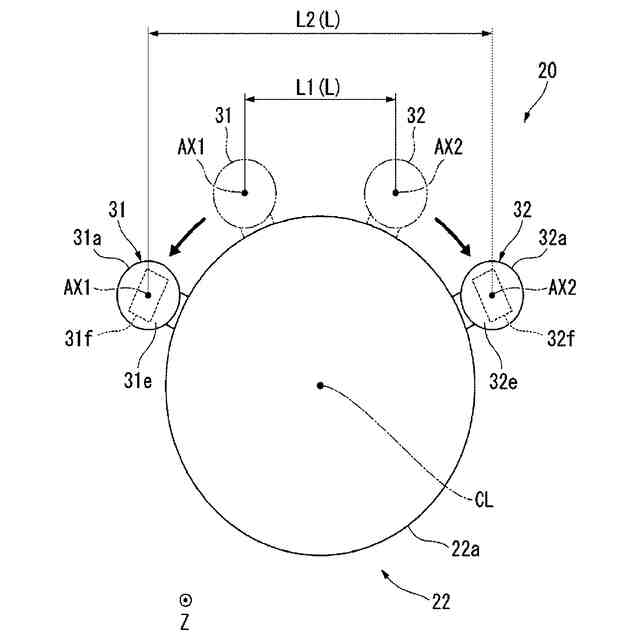
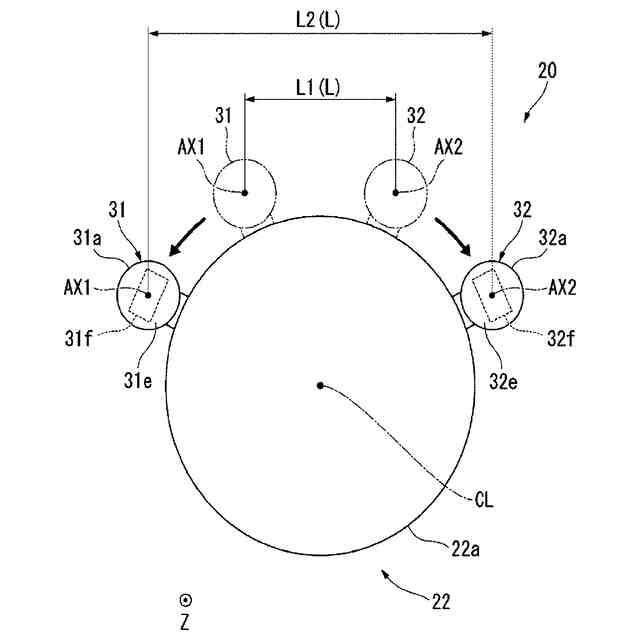
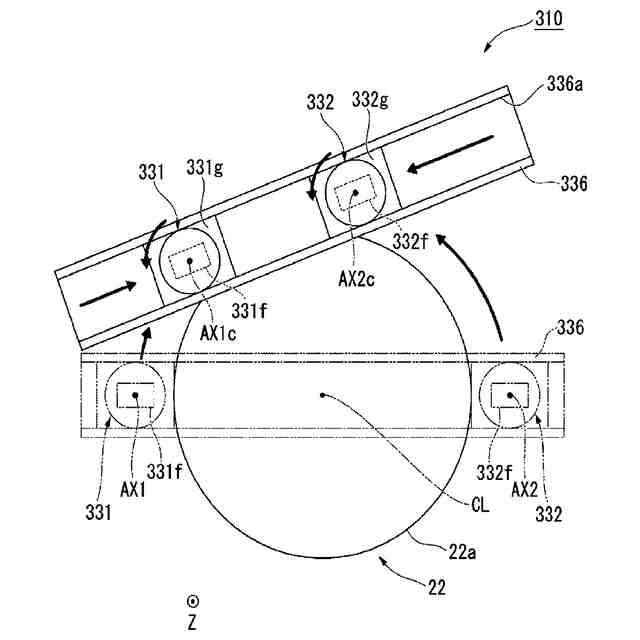
図5は、エンドエフェクタの一部、第1撮像装置、および第2撮像装置を中心軸方向の先端側から見た図である。
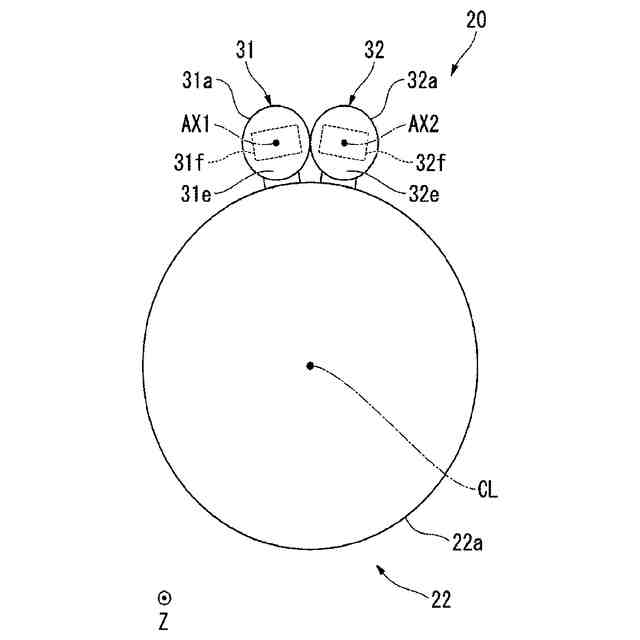
図6は、エンドエフェクタの一部、第1撮像装置、および第2撮像装置を中心軸方向の先端側から見た図であって、第1撮像装置および第2撮像装置が所定の初期位置に位置する場合を示す図である。
図7は、第2実施形態のロボットシステムの一部を示す斜視図である。
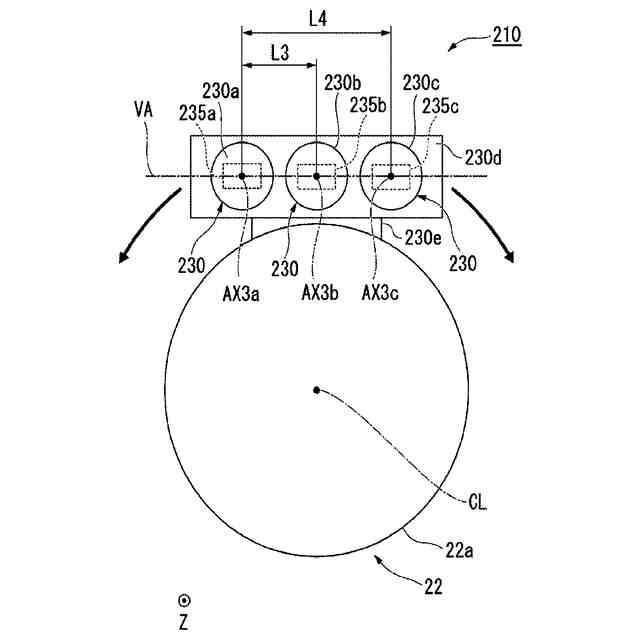
図8は、第3実施形態のロボットシステムの一部を中心軸方向の先端側から見た図である。
図9は、第4実施形態のロボットシステムの一部を中心軸方向の先端側から見た図である。
図10は、第5実施形態のロボットシステムの一部を中心軸方向の先端側から見た図である。
図11は、第5実施形態のロボットシステムが対象物の距離に関する情報を取得する際の手順の一部を説明するための図である。
図12Aは、第5実施形態における撮像装置のズーム倍率が比較的小さい場合で、基線長が比較的大きくなる2つの画像を選択した場合の一例について示す図である。
図12Bは、第5実施形態における撮像装置のズーム倍率が比較的大きい場合で、基線長が比較的大きくなる2つの画像を選択した場合の一例について示す図である。
図12Cは、第5実施形態における撮像装置のズーム倍率が比較的大きい場合で、基線長が比較的小さくなる2つの画像を選択した場合の一例について示す図である。
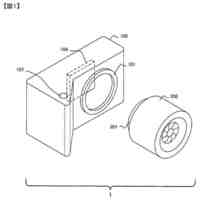
図13は、第6実施形態のロボットシステムを示す斜視図である。
図14は、第7実施形態のロボットシステムを示す斜視図である。
図15は、第8実施形態のロボットシステムを示す斜視図である。
図16は、第9実施形態のロボットシステムを示す斜視図である。
【発明を実施するための形態】
【0006】
以下、図面を参照しながら、本発明の実施形態に係るロボットシステム、ロボットアーム、エンドエフェクタ、およびアダプタについて説明する。
なお、本発明の範囲は、以下の実施の形態に限定されず、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、各構造における縮尺および数等を、実際の構造における縮尺および数等と異ならせる場合がある。
【0007】
<第1実施形態>
図1は、本実施形態のロボットシステム10を示す斜視図である。図2は、本実施形態のロボットシステム10の構成の一部を示すブロック図である。
図1に示すように、ロボットシステム10は、ロボット20と、撮像装置30と、制御部40と、表示部50と、を有する。ロボット20は、例えば、作業台WB上の対象物Wに対して作業を行う。
【0008】
ロボット20は、ロボットアーム21と、エンドエフェクタ22と、アダプタ23と、を有する。ロボットアーム21は、可動部としてアーム部24を有する。本実施形態においてアーム部24は、複数設けられている。ロボットアーム21は、例えば、複数のアーム部24が連結されて構成された多関節アームである。アーム部24は、例えば、第1アーム部24a、第2アーム部24b、第3アーム部24c、第4アーム部24d、および第5アーム部24eの5つのアーム部を含む。第1アーム部24aと第2アーム部24bと第3アーム部24cと第4アーム部24dと第5アーム部24eとは、ロボットアーム21の設置面からこの順に連結されている。
【0009】
図2に示すように、ロボットアーム21は、アーム駆動部25と、アーム位置取得部26と、を有する。アーム駆動部25は、例えば、サーボモータである。アーム駆動部25は、例えば、アーム部24ごとに設けられている。つまり、アーム駆動部25は、例えば、5つ設けられている。
【0010】
第1アーム部24aに設けられたアーム駆動部25は、ロボット20の設置面を基準にして第1アーム部24aを変位させる。第2アーム部24bに設けられたアーム駆動部25は、第1アーム部24aを基準にして第2アーム部24bを変位させる。第3アーム部24cに設けられたアーム駆動部25は、第2アーム部24bを基準にして第3アーム部24cを変位させる。第4アーム部24dに設けられたアーム駆動部25は、第3アーム部24cを基準にして第4アーム部24dを変位させる。第5アーム部24eに設けられたアーム駆動部25は、第4アーム部24dを基準にして第5アーム部24eを変位させる。各アーム駆動部25は、例えば、各アーム部24をそれぞれ回転させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ニコン
電子機器
10日前
株式会社ニコン
撮像素子
6日前
株式会社ニコン
露光装置
17日前
株式会社ニコン
撮像素子
12日前
株式会社ニコン
交換レンズ
10日前
株式会社ニコン
画像表示装置
4日前
株式会社ニコン
走査型顕微鏡
25日前
株式会社ニコン
カメラボディ
1か月前
株式会社ニコン
ロボットシステム
6日前
株式会社ニコン
光学系及び光学機器
25日前
株式会社ニコン
加工装置及び加工方法
17日前
株式会社ニコン
変倍光学系及び光学機器
19日前
株式会社ニコン
変倍光学系および光学機器
10日前
株式会社ニコン
表示制御装置及び監視システム
19日前
株式会社ニコン
レンズ鏡筒、撮像装置、及び駆動装置
1か月前
株式会社ニコン
画像処理方法、画像処理装置、及びプログラム
12日前
株式会社ニコン
動画圧縮装置、電子機器、および動画圧縮プログラム
10日前
国立大学法人大阪大学
画像処理装置、画像処理装置の作動方法、及びプログラム
19日前
株式会社ニコン
像解析装置、解析装置、形状測定装置、像解析方法、測定条件決定方法、形状測定方法及びプログラム
6日前
個人
固定補助具
10日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
4日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
7日前
トヨタ自動車株式会社
カプラ接続治具
14日前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
5日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ