TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117221
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011953
出願日
2024-01-30
発明の名称
移動制御システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/225 20240101AFI20250804BHJP(制御;調整)
要約
【課題】外界センサに異常のある自律移動体を速やかに目的地まで誘導することが可能な移動制御システムを提供すること。
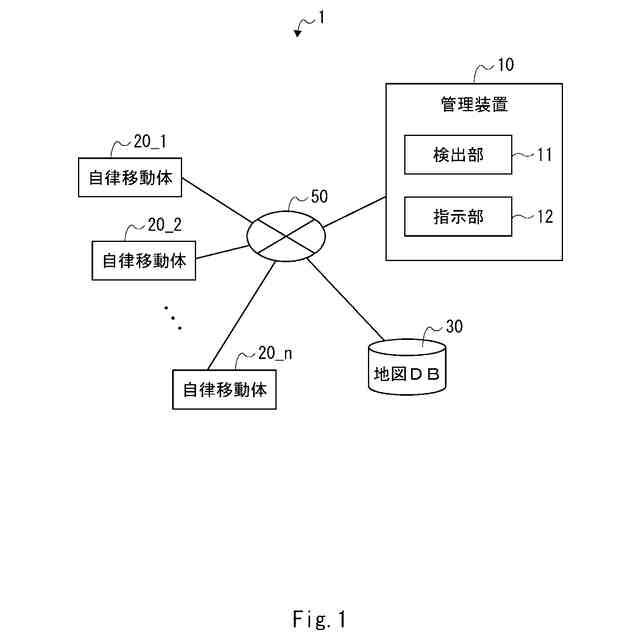
【解決手段】本開示にかかる移動制御システムにおいて、管理装置は、外界センサに異常のある自律移動体を第1自律移動体として検出する検出部と、第2自律移動体に第1自律移動体を誘導するように指示する指示部と、を有し、第1自律移動体は、内界センサを用いて自己位置を推定するとともに、推定した自己位置の分散値を算出する第1自己位置推定部と、自己位置を推定しながら第2自律移動体によって設定された目的地に向かって第1自律移動体を移動させる第1移動制御部と、を有し、第2自律移動体は、第1自律移動体により推定された自己位置の分散値が閾値以上の場合に、第1自律移動体の位置を計測する計測部と、第1自律移動体に対して、目的地、及び、計測した第1自律移動体の位置情報、を送信する第2通信部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
管理装置と、
複数の自律移動体と、
を備えた移動制御システムであって、
前記管理装置は、
前記複数の自律移動体のうち、自己位置の推定に用いられる外界センサに異常のある自律移動体を第1自律移動体として検出する検出部と、
前記複数の自律移動体のうち、前記第1自律移動体とは別の自律移動体である第2自律移動体に、前記第1自律移動体を誘導するように指示する指示部と、
を有し、
前記第1自律移動体は、
内界センサを用いて自己位置を推定するとともに、推定した自己位置の分散値を算出する、第1自己位置推定部と、
前記第2自律移動体に対して、推定した自己位置の分散値を送信する第1通信部と、
前記第1自己位置推定部により自己位置を推定しながら、前記第2自律移動体によって設定された目的地に向かって前記第1自律移動体を移動させる第1移動制御部と、
を有し、
前記第2自律移動体は、
外界センサを用いて自己位置を推定する第2自己位置推定部と、
前記第2自己位置推定部により自己位置を推定しながら前記第2自律移動体を移動させる第2移動制御部と、
前記第1自律移動体により推定された自己位置の分散値が閾値以上の場合に、前記第1自律移動体の位置を計測する計測部と、
前記第1自律移動体に対して、前記目的地、及び、計測した前記第1自律移動体の位置情報、を送信する第2通信部と、
を有する、
移動制御システム。
続きを表示(約 450 文字)
【請求項2】
前記第1自律移動体において、前記第1自己位置推定部は、所定率以上の確率で自己位置であると推定したエリアの大きさを分散値として算出する、
請求項1に記載の移動制御システム。
【請求項3】
前記第1自律移動体は、ARマーカをさらに有し、
前記第2自律移動体は、
前記計測部は、カメラの撮影画像を解析することによって特定される前記ARマーカから、前記第1自律移動体の位置を計測する、
請求項1に記載の移動制御システム。
【請求項4】
前記第1自律移動体は、前記外界センサに異常があることを前記管理装置に通知するように構成され、
前記管理装置において、前記検出部は、前記外界センサに異常があることを通知した前記第1自律移動体を検出する、
請求項1に記載の移動制御システム。
【請求項5】
前記複数の自律移動体は、何れも、自律移動型のロボットである、
請求項1に記載の移動制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年では、複数の自律移動体のうち、外界センサの故障等によって正確な自己位置の推定が困難になった自律移動体を速やかに目的地まで誘導することが求められている。関連する技術は、例えば特許文献1に開示されている。
【0003】
特許文献1に開示された救援ロボットシステムでは、管理サーバが、自律移動ロボットから救援の通知を受けた場合に配下のロボットに救援を指示し、救援指示を受けた救援ロボットは、被救援ロボットの探索を行い、被救援ロボットの位置を算出し、且つ、算出した位置情報を被救援ロボットに通知することによって被救援ロボットの自己位置推定のリカバリを行う。
【先行技術文献】
【特許文献】
【0004】
特開2010-3240号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されたシステムでは、被救援ロボットが、救援ロボットから自己位置の情報を取得した後は外界センサを用いて引き続き自律移動可能であることが前提となっており、特許文献1に開示されたシステムは、外界センサの故障等によって正確な自律移動が困難な自律移動体を目的地まで移動させることができない、という課題があった。
【0006】
本開示は、以上の背景に鑑みなされたものであり、外界センサに異常のある自律移動体を速やかに目的地まで誘導することが可能な移動制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示にかかる移動制御システムは、管理装置と、複数の自律移動体と、を備えた移動制御システムであって、前記管理装置は、前記複数の自律移動体のうち、自己位置の推定に用いられる外界センサに異常のある自律移動体を第1自律移動体として検出する検出部と、前記複数の自律移動体のうち、前記第1自律移動体とは別の自律移動体である第2自律移動体に、前記第1自律移動体を誘導するように指示する指示部と、を有し、前記第1自律移動体は、内界センサを用いて自己位置を推定するとともに、推定した自己位置の分散値を算出する、第1自己位置推定部と、前記第2自律移動体に対して、推定した自己位置の分散値を送信する第1通信部と、前記第1自己位置推定部により自己位置を推定しながら、前記第2自律移動体によって設定された目的地に向かって前記第1自律移動体を移動させる第1移動制御部と、を有し、前記第2自律移動体は、外界センサを用いて自己位置を推定する第2自己位置推定部と、前記第2自己位置推定部により自己位置を推定しながら前記第2自律移動体を移動させる第2移動制御部と、前記第1自律移動体により推定された自己位置の分散値が閾値以上の場合に、前記第1自律移動体の位置を計測する計測部と、前記第1自律移動体に対して、前記目的地、及び、計測した前記第1自律移動体の位置情報、を送信する第2通信部と、を有する。この移動制御システムは、外界センサに異常のある自律移動体を別の自律移動体によって速やかに目的地まで誘導することができる。
【発明の効果】
【0008】
本開示により、外界センサに異常のある自律移動体を速やかに目的地まで誘導することが可能な移動制御システムを提供することができる。
【図面の簡単な説明】
【0009】
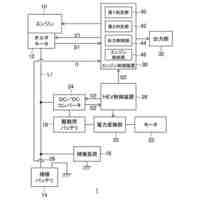
実施の形態1にかかる移動制御システムの構成例を示す図である。
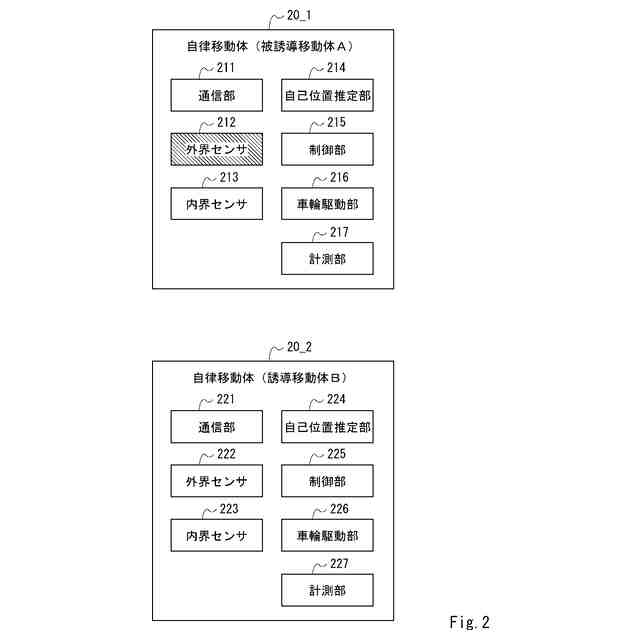
実施の形態1にかかる移動制御システムに設けられた複数の自律移動体のうち、誘導される自律移動体、及び、誘導を行う自律移動体、のそれぞれ構成例を示すブロック図である。
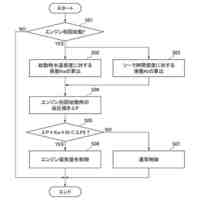
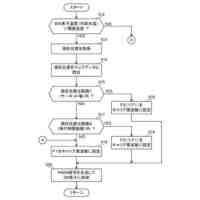
実施の形態1にかかる移動制御システムの動作を示すフローチャートである。
実施の形態1にかかる移動制御システムの動作を説明するための図である。
【発明を実施するための形態】
【0010】
以下、発明の実施形態を通じて本発明を説明するが、特許請求の範囲に係る発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。説明の明確化のため、以下の記載及び図面は、適宜、省略、及び簡略化がなされている。各図面において、同一の要素には同一の符号が付されており、必要に応じて重複説明は省略されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
サーバ
5日前
トヨタ自動車株式会社
電動車
11日前
トヨタ自動車株式会社
加熱装置
11日前
トヨタ自動車株式会社
冷却構造
4日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
内燃機関
11日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
11日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
11日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
二次電池
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
検査装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
高圧タンク
1日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
シート構造
1日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
電源システム
1日前
トヨタ自動車株式会社
運行管理装置
4日前
トヨタ自動車株式会社
情報処理装置
11日前
トヨタ自動車株式会社
電力変換装置
11日前
トヨタ自動車株式会社
電力制御装置
1日前
トヨタ自動車株式会社
セルスタック
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ