TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116601
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011116
出願日
2024-01-29
発明の名称
搬送設備
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/80 20240101AFI20250801BHJP(制御;調整)
要約
【課題】物品を搬送する複数の搬送車を備えた搬送設備において、搬送車に対する電力給供給が遮断された場合に、電力供給の再開後、搬送車の状態を適切に復旧させると共に、新たな不具合の発生を低減させることが可能な技術が望まれる。
【解決手段】物品を搬送する複数の搬送車と、搬送車を制御する制御システムと、を備えた搬送設備であって、搬送車は、搬送動作部を備え、制御システムは、搬送車に対する電力供給が遮断された場合に、それぞれの搬送車の作動状態情報を事前作動状態情報として取得する遮断情報取得処理と、電力供給が再開された後に、それぞれの搬送車の作動状態情報を再開後作動状態情報として取得する再開後情報取得処理と、事前作動状態情報と再開後作動状態情報とを比較した結果に基づいて、複数の搬送車のそれぞれを自動復旧の対象とするか否かを判定する自動復旧対象判定処理と、を実行する。
【選択図】図8
特許請求の範囲
【請求項1】
物品を搬送する複数の搬送車と、前記搬送車を制御する制御システムと、前記搬送車及び前記制御システムに電力供給を行う給電設備と、を備えた搬送設備であって、
前記搬送車は、前記物品の搬送のための動作を行う搬送動作部を備え、
前記制御システムは、前記搬送動作部の作動状態を示す作動状態情報を取得するように構成され、
前記制御システムは、
前記搬送車に対する前記電力供給が遮断された場合に、当該電力供給の遮断から前記搬送動作部が動作できなくなるまでの間に、それぞれの前記搬送車の前記作動状態情報を事前作動状態情報として取得すると共に、取得した前記事前作動状態情報を記憶する遮断情報取得処理と、
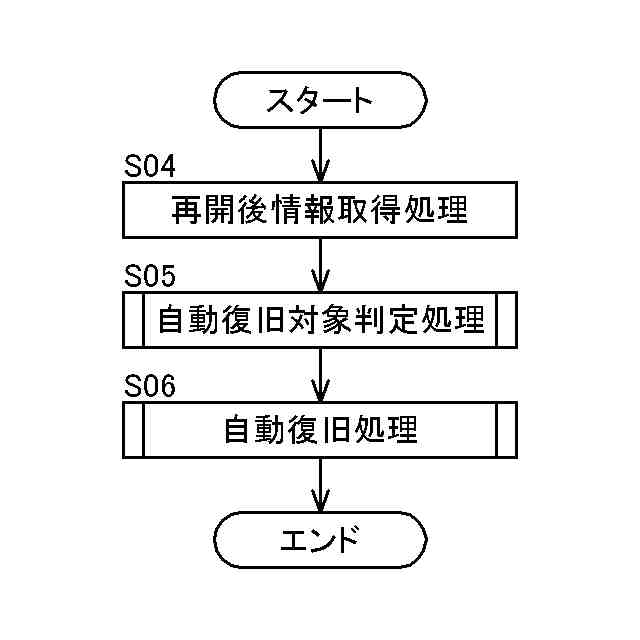
前記電力供給が再開された後に、それぞれの前記搬送車の前記作動状態情報を再開後作動状態情報として取得する再開後情報取得処理と、
前記事前作動状態情報と前記再開後作動状態情報とを比較した結果に基づいて、複数の前記搬送車のそれぞれを自動復旧の対象とするか否かを判定する自動復旧対象判定処理と、
前記自動復旧対象判定処理により前記自動復旧の対象と判定した前記搬送車を制御して、前記搬送車に前記電力供給の遮断前の動作を再開させる自動復旧処理を実行する、搬送設備。
続きを表示(約 2,600 文字)
【請求項2】
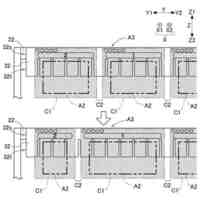
前記搬送動作部は、前記物品を保持する保持装置と、移載対象箇所との間での前記物品の移載のために前記保持装置を移動させる移動装置と、を備え、
前記移動装置は、前記保持装置を、前記搬送車が走行する場合の位置である基準位置と、前記移載対象箇所との間で前記物品を移載する場合の位置である移載位置との間で移動させるように構成され、
前記作動状態情報は、前記保持装置の位置を示す保持位置情報を含み、
前記制御システムは、前記自動復旧対象判定処理において、前記事前作動状態情報及び前記再開後作動状態情報の少なくとも一方に、前記保持装置が前記基準位置を含む予め定められた許容範囲の外に位置していることを示す前記保持位置情報が含まれている場合に、前記搬送車を前記自動復旧の対象外であると判定する、請求項1に記載の搬送設備。
【請求項3】
前記搬送動作部は、走行経路に沿って走行する走行装置と、前記走行経路上の障害物を検知する障害物検知装置と、を備え、
前記制御システムは、前記搬送車のモードとして、設定された目的地点に向けて前記走行装置による走行を行わせると共に前記障害物検知装置により前記障害物を検知している間は前記走行装置による走行を停止させる自動モードと、管理者により操作される操作端末からの指令に従って前記走行装置による走行を行わせる手動モードと、を実行可能であり、
前記作動状態情報は、前記搬送車のモードを示す走行モード情報を含み、
前記制御システムは、前記自動復旧対象判定処理において、前記事前作動状態情報及び前記再開後作動状態情報の少なくとも一方に、前記搬送車のモードが前記手動モードであることを示す前記走行モード情報が含まれている場合に、前記搬送車を前記自動復旧の対象外と判定する、請求項1に記載の搬送設備。
【請求項4】
前記搬送動作部は、前記搬送車が走行する走行経路上の障害物を検知する障害物検知装置を備え、
前記作動状態情報は、前記障害物検知装置の検知状態を示す障害物検知情報を含み、
前記制御システムは、前記自動復旧対象判定処理において、前記事前作動状態情報及び前記再開後作動状態情報の少なくとも一方に、前記障害物を検知していることを示す前記障害物検知情報が含まれている場合に、前記搬送車を前記自動復旧の対象外と判定する、請求項1に記載の搬送設備。
【請求項5】
前記搬送動作部は、走行経路に沿って走行する走行装置を備え、
前記作動状態情報は、前記走行経路における前記搬送車の位置を示す走行位置情報を含み、
前記事前作動状態情報に含まれる前記走行位置情報を事前走行位置情報とし、前記再開後作動状態情報に含まれる前記走行位置情報を再開後走行位置情報として、
前記制御システムは、前記自動復旧対象判定処理において、前記事前走行位置情報に示された位置と前記再開後走行位置情報に示された位置との差が、予め定められた判定しきい値以上である場合に、前記搬送車を前記自動復旧の対象外と判定する、請求項1に記載の搬送設備。
【請求項6】
走行経路における予め定められた複数個所のそれぞれに被検出体が設置され、
前記搬送動作部は、前記走行経路に沿って走行する走行装置と、前記被検出体を検出する検出装置と、を備え、
前記走行装置は、駆動輪と、前記駆動輪を駆動する駆動装置と、前記駆動輪の回転方向の位置を検出する回転位置検出装置と、を備え、
前記作動状態情報は、前記走行経路における前記搬送車の位置を示す走行位置情報を含み、
前記事前作動状態情報に含まれる前記走行位置情報を事前走行位置情報とし、前記再開後作動状態情報に含まれる前記走行位置情報を再開後走行位置情報として、
前記制御システムは、
前記電力供給が遮断された場合に、前記駆動装置が動作できなくなる前に前記駆動輪を停止させるように前記駆動装置を制御し、
前記駆動輪の停止位置を、前記検出装置の検出結果及び前記回転位置検出装置の検出結果に基づいて特定し、特定した前記駆動輪の停止位置と前記回転位置検出装置の検出結果とを、前記事前走行位置情報として記憶し、
前記電力供給が再開された後、前記事前走行位置情報が記憶されている場合に、前記回転位置検出装置の検出結果を、前記再開後走行位置情報として取得し、前記自動復旧対象判定処理において、前記事前走行位置情報に含まれている前記回転位置検出装置の検出結果と、前記再開後走行位置情報に含まれている前記回転位置検出装置の検出結果との差が、予め定められた設定値以上である場合に、前記搬送車を前記自動復旧の対象外と判定し、
前記自動復旧対象判定処理により前記自動復旧の対象と判定した前記搬送車について、前記事前走行位置情報に含まれている前記駆動輪の停止位置と、前記事前走行位置情報に含まれている前記回転位置検出装置の検出結果と前記再開後走行位置情報に含まれている前記回転位置検出装置の検出結果との差と、に基づいて、前記電力供給が再開された後の前記駆動輪の停止位置を特定する、請求項1に記載の搬送設備。
【請求項7】
走行経路における予め定められた複数個所のそれぞれに被検出体が設置され、
前記搬送動作部は、駆動輪及び前記駆動輪を駆動する駆動装置を備えて前記走行経路に沿って走行する走行装置と、前記被検出体を検出する検出装置と、を備え、
前記自動復旧対象判定処理により前記自動復旧の対象と判定した前記搬送車を対象搬送車として、
前記制御システムは、
前記自動復旧処理において、前記対象搬送車に対して前記事前作動状態情報を復元させる復元指令を送信し、
前記事前作動状態情報を復元した前記対象搬送車の走行を開始させると共に、走行開始後、当該対象搬送車が最初に前記被検出体を検出するまで、前記電力供給の遮断がない場合の通常の走行速度よりも低速で走行させるように前記対象搬送車を制御する、請求項1から5のいずれか一項に記載の搬送設備。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送設備に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
例えば、特開平10-111716号公報(特許文献1)には、搬送設備に関する技術が開示されている。以下、背景技術の説明において括弧内に示す符号は特許文献1のものである。
【0003】
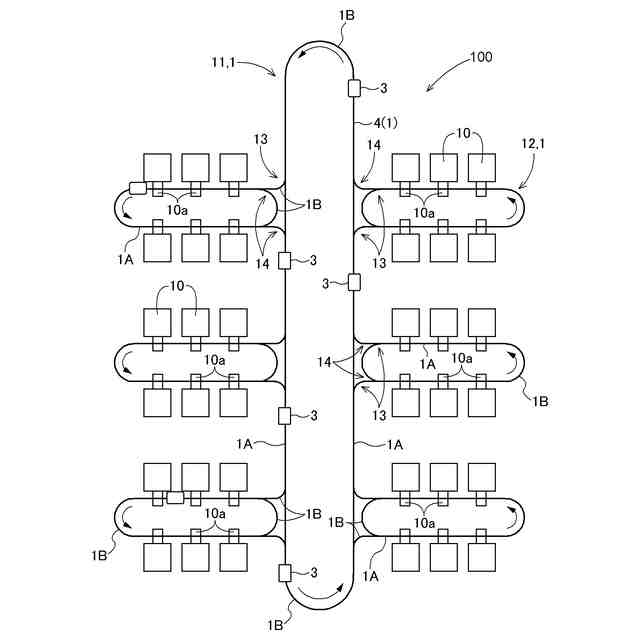
特許文献1の搬送設備は、走行経路1に沿って走行する複数の搬送車(搬送装置4)と、走行経路1に沿って設けられた複数のステーション(ST)と、複数の搬送車を制御する運行管理装置(5)を備えている。複数の搬送車のそれぞれは、外部からの電力供給により走行し、複数のステーション(ST)間で物品を搬送する。搬送車は、自車の走行を制御する制御装置(コントローラ13)と、自車の走行位置を検知するための走行用エンコーダ(19)と、非常用のバッテリ(34)とを備えている。搬送車は、停電等により外部からの電力供給が遮断されると、走行するための駆動力を失い停止する。一方、非常用のバッテリ(34)は、外部からの電力供給が遮断されると、制御装置及び走行用エンコーダ(19)に対して一定期間、電力を供給する。これにより搬送車は、自車の停止位置を制御装置に設けられた不揮発性メモリ(21)に記憶することができる。
【先行技術文献】
【特許文献】
【0004】
特開平10-111716号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の搬送設備では、外部からの電力供給が遮断された場合に、複数の搬送車のそれぞれが、自車の停止位置を記憶することを利用して、電力供給の再開後、各搬送車による物品7の搬送を直ちに再開できるようにし、これにより設備の稼働率の向上を図っている。一方、搬送車の状態によっては、電力供給の再開後、物品7の搬送を直ちに再開させることで、更なる不具合が発生する恐れもある。例えば、外部からの電力供給が遮断された後、電力供給が再開される前に、人手により停止位置が変更された搬送車や、何等かの異常を検知している搬送車に対してまで、物品の搬送を直ちに再開させると、新たな異常や問題が発生する可能性があり、そのことによって却って設備の稼働率が低下する恐れがある。
【0006】
そこで、物品を搬送する複数の搬送車を備えた搬送設備において、搬送車に対する電力給供給が遮断された場合に、電力供給の再開後、搬送車の状態を適切に復旧させると共に、新たな不具合の発生を低減させることが可能な技術が望まれる。
【課題を解決するための手段】
【0007】
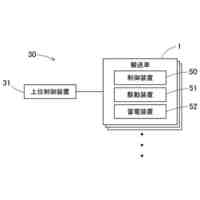
本開示に係る搬送設備は、物品を搬送する複数の搬送車と、前記搬送車を制御する制御システムと、前記搬送車及び前記制御システムに電力供給を行う給電設備と、を備えた搬送設備であって、
前記搬送車は、前記物品の搬送のための動作を行う搬送動作部を備え、
前記制御システムは、前記搬送動作部の作動状態を示す作動状態情報を取得するように構成され、
前記制御システムは、
前記搬送車に対する前記電力供給が遮断された場合に、当該電力供給の遮断から前記搬送動作部が動作できなくなる前までの間に、それぞれの前記搬送車の前記作動状態情報を事前作動状態情報として取得すると共に、取得した前記事前作動状態情報を記憶する遮断情報取得処理と、
前記電力供給が再開された後に、それぞれの前記搬送車の前記作動状態情報を再開後作動状態情報として取得する再開後情報取得処理と、
前記事前作動状態情報と前記再開後作動状態情報とを比較した結果に基づいて、複数の前記搬送車のそれぞれを自動復旧の対象とするか否かを判定する自動復旧対象判定処理と、
前記自動復旧対象判定処理により前記自動復旧の対象と判定した前記搬送車を制御して、前記搬送車に前記電力供給の遮断前の動作を再開させる自動復旧処理を実行する。
【0008】
本構成によれば、例えば、停電等により、複数の搬送車のそれぞれに対する電力供給が遮断され、その後、電力供給が再開された場合に、複数の搬送車のそれぞれについて自動復旧の対象とするか否かを適切に判定することができる。従って、自動復旧に適した状態の搬送車についてのみ自動復旧処理を行い、自動復旧に適さない状態の搬送車については、自動復旧処理を行わないようにすることができる。
従って、作業者が全ての搬送車の復旧処理を手動で行う場合に比べて、作業者の手間を削減することができると共に、自動復旧に適さない状態の搬送車に自動復旧処理を行うことによって更なる異常や問題を発生させる可能性を低減できる。
また、本構成によれば、自動復旧の対象と判定した搬送車には、電力供給の遮断前の動作を再開させるため、電力供給の遮断前の状態に適切に復旧させることができる。従って、複数の搬送車に対する自動復旧を容易に行うことができる。
このように本構成によれば、搬送車に対する電力給電が遮断された場合に、電力給電の再開後、搬送車の状態を適切に復旧させると共に、新たな不具合が発生する可能性を低減させることができる。
【0009】
搬送設備のさらなる特徴と利点は、図面を参照して説明する例示的且つ非限定的な実施形態についての以下の記載から明確となる。
【図面の簡単な説明】
【0010】
制御ブロック図
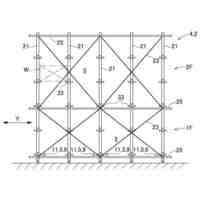
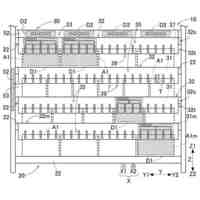
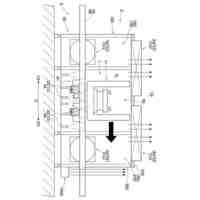
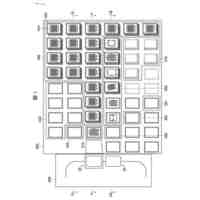
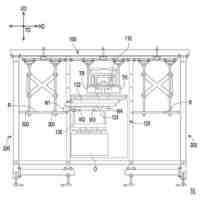
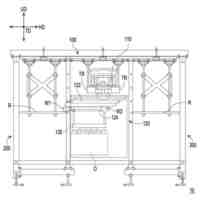
搬送設備の全体概略図
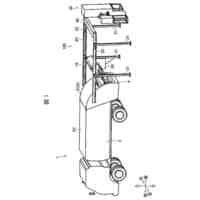
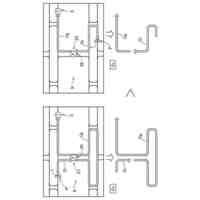
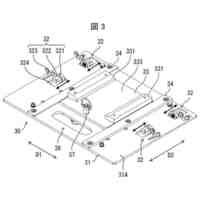
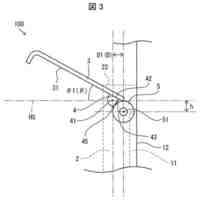
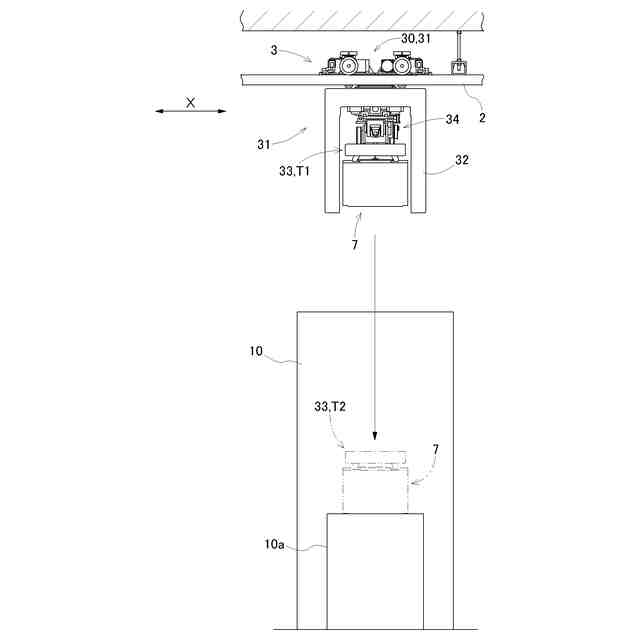
搬送車の側面図
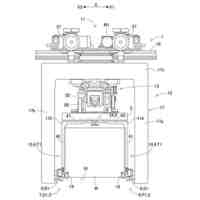
搬送車の正面図
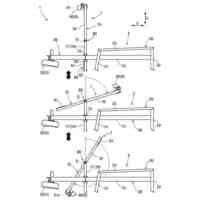
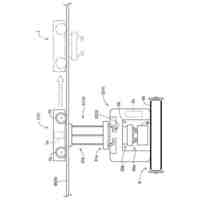
物品の移載動作を模式的に示す側面図
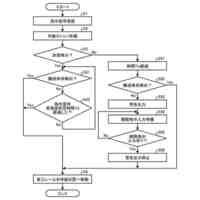
制御フロー図
制御フロー図
制御フロー図
制御フロー図
自動復旧処理における搬送車の走行を模式的に示す平面図
別実施形態の制御フロー図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイフク
倉庫
1か月前
株式会社ダイフク
搬送車
今日
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
28日前
株式会社ダイフク
洗浄装置
28日前
株式会社ダイフク
洗浄装置
28日前
株式会社ダイフク
作業設備
24日前
株式会社ダイフク
作業設備
今日
株式会社ダイフク
搬送設備
10日前
株式会社ダイフク
作業設備
今日
株式会社ダイフク
作業設備
今日
株式会社ダイフク
作業設備
今日
株式会社ダイフク
作業設備
今日
株式会社ダイフク
作業設備
今日
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品搬送設備
20日前
株式会社ダイフク
搬送システム
4日前
株式会社ダイフク
自動倉庫システム
今日
株式会社ダイフク
移動体清掃システム
18日前
株式会社ダイフク
手荷物保管システム
24日前
株式会社ダイフク
治具、および交換補助具
10日前
株式会社ダイフク
開閉機構およびカバー構造
1か月前
株式会社ダイフク
洗浄装置および洗浄装置管理システム
1か月前
株式会社ダイフク
搬送車、及び、搬送車を備えた搬送設備
1か月前
台湾大福高科技設備股分有限公司
物体搬送システム
4日前
台湾大福高科技設備股分有限公司
物体搬送システム
今日
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
24日前
株式会社ダイヘン
移動体
3か月前
オムロン株式会社
スレーブ装置
今日
愛知製鋼株式会社
車両用システム
1か月前
株式会社FUJI
加工機械ライン
2か月前
ローム株式会社
基準電圧源
21日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ