TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127385
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024024104
出願日
2024-02-20
発明の名称
車両用制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
53/00 20060101AFI20250825BHJP(鉄道以外の路面車両)
要約
【課題】被牽引車両の駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図ることができる車両用制御装置を提供する。
【解決手段】牽引車両が被牽引車両を牽引する牽引走行状態にあるときに、駆動力源を有する被牽引車両が牽引車両を連結器を介して押さないように被牽引車両の駆動力が制限される。これにより、被牽引車両が駆動力を発生することで、牽引走行状態での駆動アシストができ、例えば加速性能や登坂性能の向上、牽引容量の拡大、距離の拡張などが見込める。更に、被牽引車両の駆動力の応答が制御されることで被牽引車両が牽引車両を押すことが回避又は抑制される。よって、被牽引車両の駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図ることができる。
【選択図】図3
特許請求の範囲
【請求項1】
牽引車両に連結器を介して牽引される、駆動力源を有する被牽引車両の駆動力を制御する駆動制御部を備えた車両用制御装置であって、
前記駆動制御部は、前記牽引車両が前記被牽引車両を牽引する牽引走行状態にあるときに、前記被牽引車両が前記牽引車両を前記連結器を介して押さないように前記被牽引車両の駆動力を制限することを特徴とする車両用制御装置。
続きを表示(約 530 文字)
【請求項2】
前記駆動制御部は、前記牽引車両の駆動力に基づいて、前記被牽引車両が前記牽引車両を押さない前記被牽引車両の駆動力範囲の上限値を算出し、前記上限値によって前記被牽引車両の駆動力を制限することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記上限値は、前記連結器における荷重が、前記被牽引車両が前記牽引車両を押す方向の荷重未満となる、前記被牽引車両の駆動力範囲の上限値であることを特徴とする請求項2に記載の車両用制御装置。
【請求項4】
前記駆動制御部は、前記連結器における荷重の方向を取得し、前記荷重の方向が前記被牽引車両が前記牽引車両を押さない方向となるように、前記被牽引車両の駆動力を制限することを特徴とする請求項1に記載の車両用制御装置。
【請求項5】
前記駆動制御部は、前記連結器に設けられたセンサによって前記連結器における荷重と前記荷重の方向とを取得し、前記荷重の方向が前記被牽引車両が前記牽引車両を押す方向である場合には、前記被牽引車両の駆動力を制限し、前記荷重が大きい程、前記被牽引車両の駆動力を低減する量を増やすことを特徴とする請求項1に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被牽引車両の駆動力を制御する車両用制御装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
牽引車両に連結器を介して牽引される、駆動力源を有する被牽引車両の駆動力を制御する駆動制御部を備えた車両用制御装置が良く知られている。例えば、特許文献1に記載された連結車両の制御装置がそれである。この特許文献1には、第1のバッテリにより駆動可能な第1のモータを搭載した牽引車両と、第2のバッテリにより駆動可能な第2のモータを搭載した被牽引車両と、が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-184584号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の駆動力の応答性は、駆動力源の種類や組み合わせなどによって異なったり、エンジン車両や電動車両のなかでもそれぞれの車両毎によって異なる。一方で、被牽引車両が駆動力を発生することによって、牽引車両が被牽引車両を牽引する牽引走行状態での加速性能が向上させられる。しかしながら、駆動力の応答性が異なっていると、被牽引車両からの駆動力が必要以上に大きくなる状況が生じる可能性がある。このような状況下では、牽引車両の挙動の乱れや運転者の違和感などを生じさせてしまうおそれがある。被牽引車両の駆動力を大きく絞れば、上述したような状況は生じ難くされるが、加速性能を向上させるという恩恵が得られ難くされる。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、被牽引車両の駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図ることができる車両用制御装置を提供することにある。
【課題を解決するための手段】
【0006】
第1の発明の要旨とするところは、(a)牽引車両に連結器を介して牽引される、駆動力源を有する被牽引車両の駆動力を制御する駆動制御部を備えた車両用制御装置であって、(b)前記駆動制御部は、前記牽引車両が前記被牽引車両を牽引する牽引走行状態にあるときに、前記被牽引車両が前記牽引車両を前記連結器を介して押さないように前記被牽引車両の駆動力を制限することにある。
【発明の効果】
【0007】
前記第1の発明によれば、牽引車両が被牽引車両を牽引する牽引走行状態にあるときに、駆動力源を有する被牽引車両が牽引車両を連結器を介して押さないように被牽引車両の駆動力が制限される。これにより、被牽引車両が駆動力を発生することで、牽引走行状態での駆動アシストができ、例えば加速性能や登坂性能の向上、牽引容量の拡大、距離の拡張などが見込める。更に、被牽引車両の駆動力の応答が制御されることで被牽引車両が牽引車両を押すことが回避又は抑制される。よって、被牽引車両の駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図ることができる。
【図面の簡単な説明】
【0008】
本発明が適用される連結車両の概略構成を説明する図であると共に、連結車両における各種制御の為の制御機能及び制御系統の要部を説明する図である。
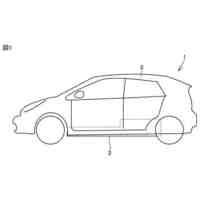
牽引車両がトレーラを牽引する牽引走行状態の一例を示す図である。
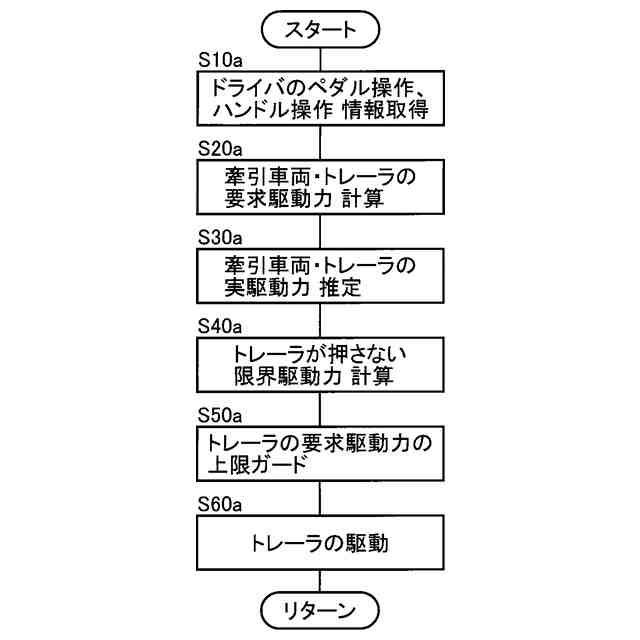
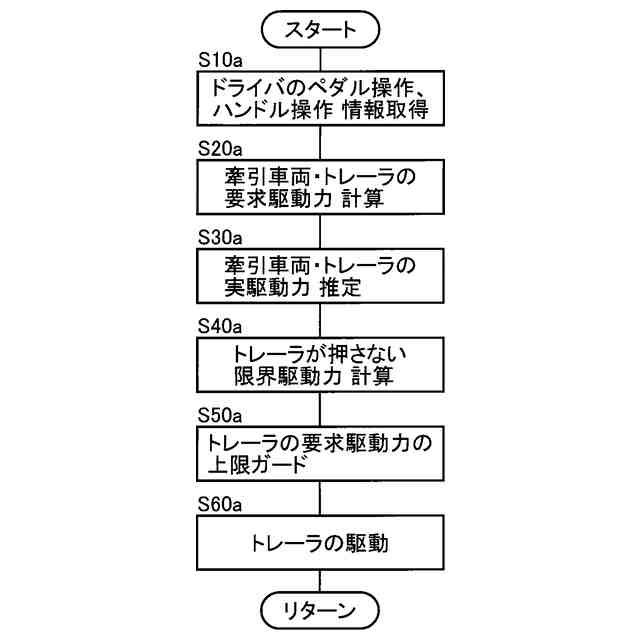
車両用制御装置の制御作動の要部を説明するフローチャートであり、トレーラ駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図る為の制御作動を説明するフローチャートである。
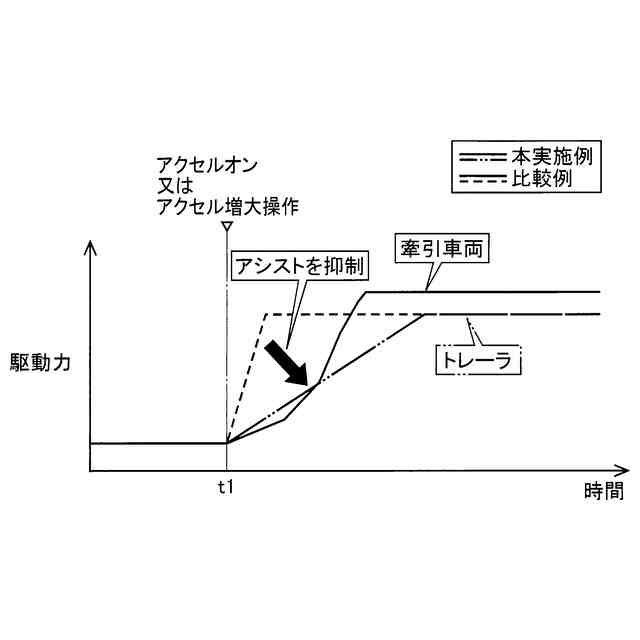
図3のフローチャートに示す制御作動を実行した場合のタイムチャートの一例を示す図である。
車両用制御装置の制御作動の要部を説明するフローチャートであって、トレーラ駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図る為の制御作動を説明するフローチャートであり、図3とは別の実施例である。
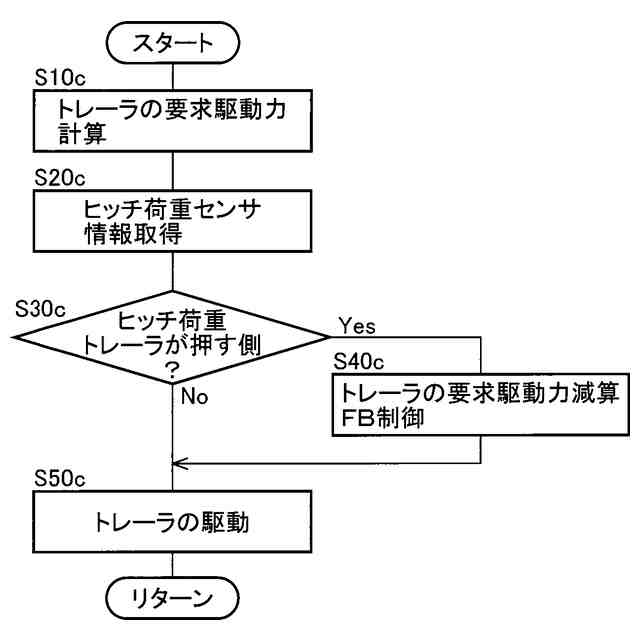
トレーラの電子制御装置の制御作動の要部を説明するフローチャートであって、トレーラ駆動力による加速性能の向上を享受しつつ、牽引車両の挙動安定を図る為の制御作動を説明するフローチャートであり、図3、5とは別の実施例である。
【発明を実施するための形態】
【0009】
以下、本発明の実施例を図面を参照して詳細に説明する。
【実施例】
【0010】
図1は、本発明が適用される連結車両10の概略構成を説明する図であると共に、連結車両10における各種制御の為の制御機能及び制御系統の要部を説明する図である。図1において、連結車両10は、牽引車両20とトレーラ60とが連結されたものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
電池
24日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
負極層
10日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
光電極
26日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
ロータ
19日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
ロータ
28日前
トヨタ自動車株式会社
電動車
28日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ