TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127954
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024977
出願日
2024-02-21
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
F16H
61/02 20060101AFI20250826BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力されても坂路での車両の後退が抑制される、車両の制御装置を提供する。
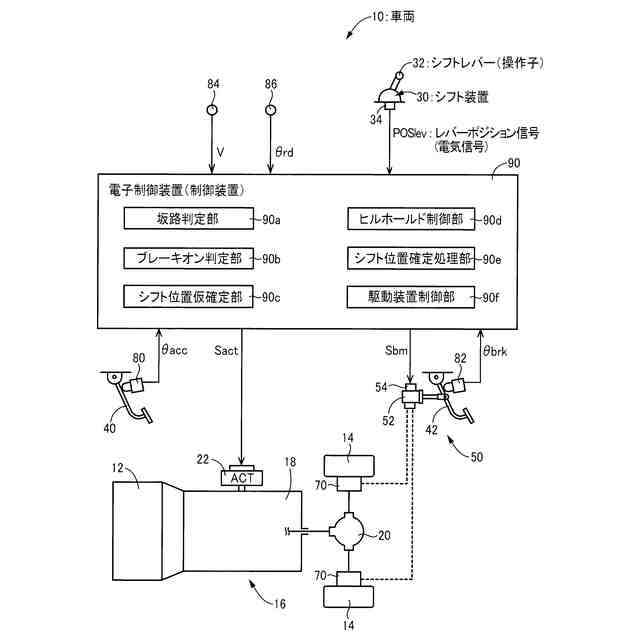
【解決手段】(a)レバーポジション信号POSlevに基づいて故障判定等が実行された後に、シフトレバー32の操作位置が確定され、(b)ヒルホールド制御を実行するための必要条件を満たすか否かの判定には、故障判定等の実行が完了する前におけるレバーポジション信号POSlevに基づいて仮確定されたシフトレバー32の操作位置が用いられる。このように、シフト装置30のシフトレバー32の操作位置を確定するための故障判定等の実行が完了する前に、仮確定されたシフトレバー32の操作位置が用いられてヒルホールド制御を実行するための必要条件を満たすか否かが判定される。
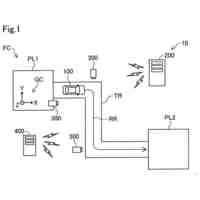
【選択図】図1
特許請求の範囲
【請求項1】
シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力されるとともにヒルホールド制御を実行する、車両の制御装置であって、
前記電気信号に基づいて所定の処理が実行された後に、前記操作子の操作位置が確定され、
前記ヒルホールド制御を実行するための必要条件を満たすか否かの判定には、前記所定の処理の実行が完了する前における前記電気信号に基づいて仮確定された前記操作子の操作位置が用いられる
ことを特徴とする車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力されるとともにヒルホールド制御を実行する、車両の制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
シフト装置の操作子の位置情報が電気信号に変換されて入力される、車両の制御装置が知られている。例えば、特許文献1に記載のものがそれである。特許文献1に記載の車両の制御装置では、電気信号に基づいて操作子の操作位置が判定される。
【0003】
最近、自動駐車や自動走行等の自動運転を想定して、シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力される、車両の制御装置が登場している。一方、電磁弁を用いた電子的制御により坂路発進時の後退を抑制する所謂ヒルホールド制御が知られている。
【先行技術文献】
【特許文献】
【0004】
特開2012-1186号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力される車両の制御装置においては、フェールセーフの観点等から操作子の操作位置を確定させるには所定の処理が必要であり、そのためには所定の期間を必要とする。一方、ヒルホールド制御は、操作子の操作位置に基づいて実行されるものである。そのため、操作子の操作位置を確定させるのに所定の期間が必要とされると、その所定の期間はヒルホールド制御が適切に実行されず、坂路で車両が後退するおそれがある。
【0006】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力されても坂路での車両の後退が抑制される、車両の制御装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の要旨とするところは、シフト装置の操作子の位置情報の全てが逐次電気信号に変換されて入力されるとともにヒルホールド制御を実行する、車両の制御装置であって、(a)前記電気信号に基づいて所定の処理が実行された後に、前記操作子の操作位置が確定され、(b)前記ヒルホールド制御を実行するための必要条件を満たすか否かの判定には、前記所定の処理の実行が完了する前における前記電気信号に基づいて仮確定された前記操作子の操作位置が用いられることにある。
【発明の効果】
【0008】
本発明の車両の制御装置によれば、(a)前記電気信号に基づいて所定の処理が実行された後に、前記操作子の操作位置が確定され、(b)前記ヒルホールド制御を実行するための必要条件を満たすか否かの判定には、前記所定の処理の実行が完了する前における前記電気信号に基づいて仮確定された前記操作子の操作位置が用いられる。このように、シフト装置の操作子の操作位置を確定するための所定の処理の実行が完了する前に、仮確定された操作子の操作位置が用いられてヒルホールド制御を実行するための必要条件を満たすか否かが判定される。これにより、操作子の操作位置が確定するまで待つ必要なく、ヒルホールド制御が適切に実行されるため、坂路での車両の後退が抑制される。
【図面の簡単な説明】
【0009】
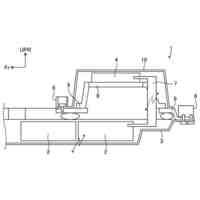
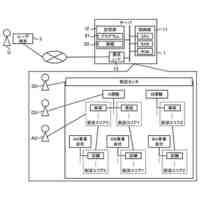
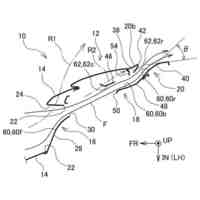
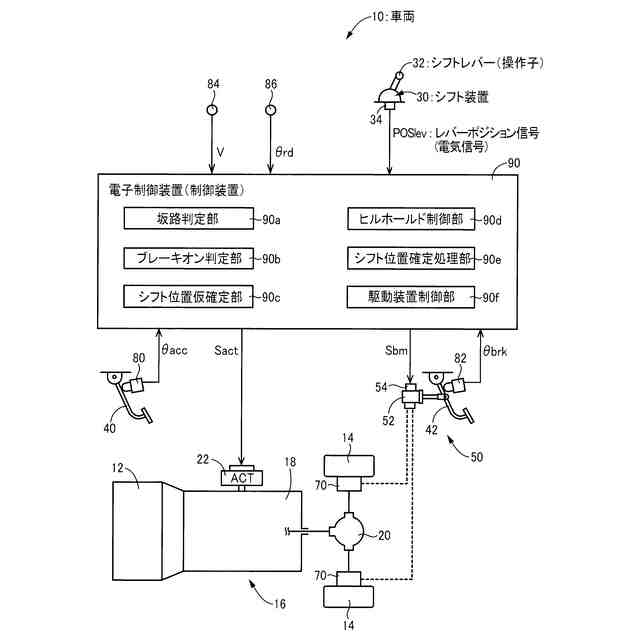
本発明の実施例に係る電子制御装置が搭載される車両の概略構成図であるとともに、車両における各種制御のための制御機能の要部を表す機能ブロック図である。
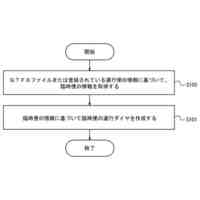
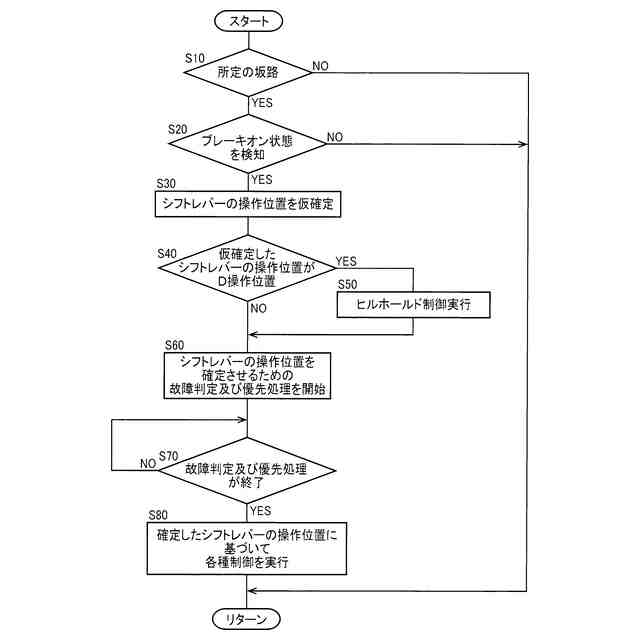
図1に示す電子制御装置の制御作動を説明するフローチャートの一例である。
【発明を実施するための形態】
【0010】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。なお、実施例において図は適宜簡略化或いは変形されており、各部の寸法比及び形状等は必ずしも正確に描かれていない。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
液系電池
1日前
トヨタ自動車株式会社
ステータ
1日前
トヨタ自動車株式会社
水系電池
5日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
車両構造
1日前
トヨタ自動車株式会社
通信装置
今日
トヨタ自動車株式会社
路側装置
4日前
トヨタ自動車株式会社
路側装置
4日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
積層電池
7日前
トヨタ自動車株式会社
更新装置
4日前
トヨタ自動車株式会社
送電装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
電気自動車
今日
トヨタ自動車株式会社
電気自動車
今日
トヨタ自動車株式会社
電気自動車
6日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
電池管理装置
1日前
トヨタ自動車株式会社
運転支援装置
5日前
トヨタ自動車株式会社
車両下部構造
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
車両前部構造
1日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
車体前部構造
1日前
トヨタ自動車株式会社
情報処理方法
4日前
トヨタ自動車株式会社
車両前部構造
1日前
トヨタ自動車株式会社
電子制御装置
今日
トヨタ自動車株式会社
情報管理装置
5日前
トヨタ自動車株式会社
車両後部構造
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ