TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129952
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026949
出願日
2024-02-26
発明の名称
モータ制御装置
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
H02P
6/08 20160101AFI20250829BHJP(電力の発電,変換,配電)
要約
【課題】高速回転中においても回転位置検出精度を高めることができるモータ制御装置を提供する。
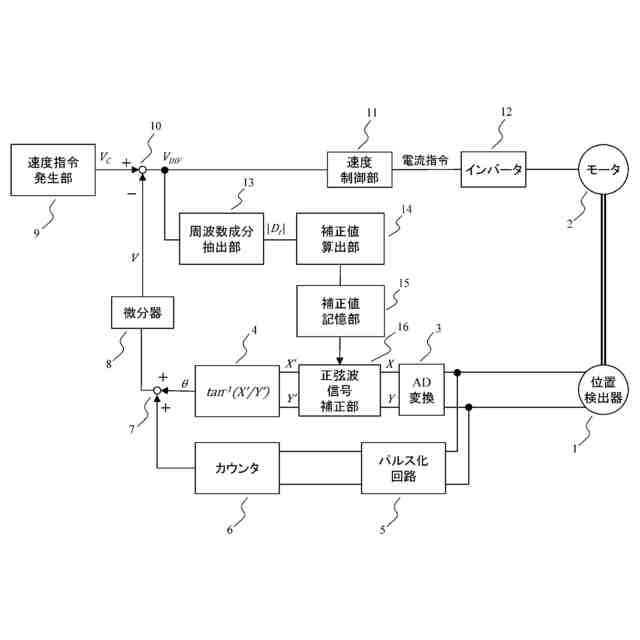
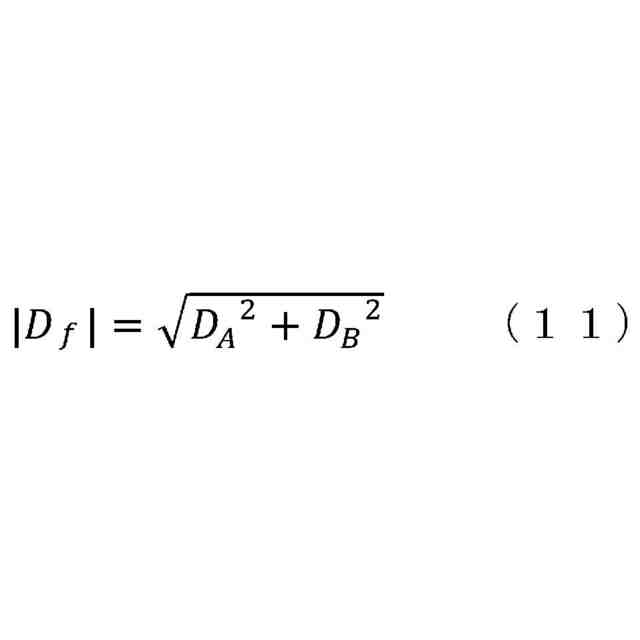
【解決手段】モータ制御装置は、2相正弦波信号を出力する位置検出器1と、コントローラと、を備え、前記コントローラは、前記2相正弦波信号の周期の1倍および1/2倍のいずれとも異なるサンプリング周期で、前記2相正弦波信号に基づいて算出した回転位置検出値θに基づいて速度検出値Vを算出し、前記速度検出値Vに含まれる誤差を算出し、特定周波数f
D
の成分|Df|を前記誤差から抽出し、前記特定周波数fDの成分|Df|が規定の目標値以下となるように、前記2相正弦波信号の直流オフセットと振幅差と位相差の少なくとも一つについて補正値を算出し、算出された前記補正値に応じて前記2相正弦波信号を補正する、ように構成されていることを特徴とする。
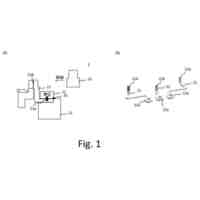
【選択図】図1
特許請求の範囲
【請求項1】
モータ制御装置であって、
モータによって回転する回転軸に取り付けられ、2相正弦波信号を出力する回転位置検出器と、
前記2相正弦波信号に基づいて前記回転軸の速度を算出するとともに、算出された速度と速度指令とに基づいて前記モータの駆動を制御するコントローラと、
を備え、前記コントローラは、
前記2相正弦波信号の周期の1倍および1/2倍のいずれとも異なるサンプリング周期で、前記2相正弦波信号に基づいて算出した回転位置検出値に基づいて速度検出値を算出し、
前記速度検出値に含まれる誤差を算出し、
前記2相正弦波信号の周波数と前記回転位置検出値のサンプリング周波数と相関する特定周波数の成分を前記誤差から抽出し、
特定周波数の成分が規定の目標値以下となるように、前記2相正弦波信号の直流オフセットと振幅差と位相差の少なくとも一つについて補正値を算出し、
算出された前記補正値に応じて前記2相正弦波信号を補正する、
ように構成されているモータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のモータ制御装置であって、
前記コントローラは、前記補正値を算出するために、前記回転位置検出値のサンプリング周波数と、前記2相正弦波信号の周期と、前記特定周波数と、に基づいて前記速度指令を算出し、設定する、ように構成されているモータ制御装置。
【請求項3】
請求項2に記載のモータ制御装置であって、
前記コントローラは、前記速度指令をV
c
、前記回転位置検出値のサンプリング周波数をf
S
、前記回転軸1回転当たりの前記2相正弦波信号の周期数をT、前記特定周波数をf
D
、任意の整数をnとした場合、前記直流オフセットを補正する場合は、V
C
=1/T(f
S
/n-f
D
)の式に基づいて前記速度指令を算出し、前記振幅差または前記位相差を補正する場合には、V
C
=1/2T(f
S
/n-f
D
)の式に基づいて前記速度指令を算出する、
ように構成されているモータ制御装置。
【請求項4】
請求項1に記載のモータ制御装置であって、
前記コントローラは、前記補正値を算出するために、前記回転位置検出値のサンプリング周波数と、前記2相正弦波信号の周期と、前記速度指令と、に基づいて、前記特定周波数を決定する、ように構成されているモータ制御装置。
【請求項5】
請求項4に記載のモータ制御装置であって、
前記コントローラは、前記特定周波数をf
D
、前記回転位置検出値のサンプリング周波数をf
S
、前記回転軸1回転当たりの前記2相正弦波信号の周期数をT、前記速度指令をV
C
、任意の整数をnとした場合、前記直流オフセットを補正する場合は、f
D
=f
S
/n-V
C
・Tの式に基づいて前記特定周波数を算出し、前記振幅差または前記位相差を補正する場合には、f
D
=f
S
/n-2V
C
・Tの式に基づいて前記特定周波数を算出する、ように構成されているモータ制御装置。
【請求項6】
請求項1から4のいずれか1項に記載のモータ制御装置であって、
前記コントローラは、
誤差補正モードが指定された場合に、前記補正値を算出し、
前記誤差補正モードが指定されていない場合、メモリに記憶された前記補正値に基づいて前記2相正弦波信号を補正する、
ように構成されているモータ制御装置。
【請求項7】
請求項1から4のいずれか1項に記載のモータ制御装置であって、
前記コントローラは、前記補正値を算出する期間、前記モータを定速回転させる、ように構成されているモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、回転軸の回転速度に応じた2相正弦波信号を出力する回転位置検出器の誤差を補正する機能を有したモータ制御装置を開示する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
工作機械の主軸などの回転軸について位置制御または速度制御を行う場合、回転軸の外周に所定の凹凸を設けた歯車を取り付け、その凹凸を磁気センサによる検出器によって互いの位相がπ/2異なる2相正弦波信号として検出し、この2相正弦波信号を処理することによって回転軸の回転角度、または回転速度を検出する方式が知られている。
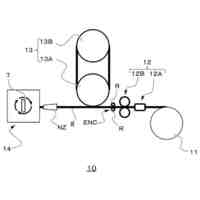
【0003】
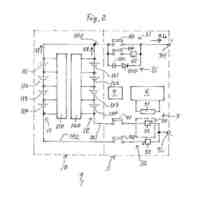
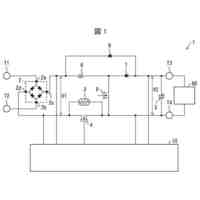
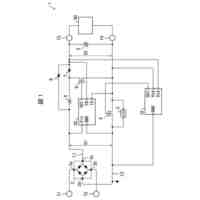
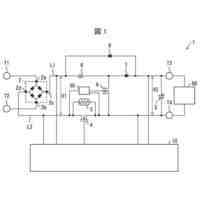
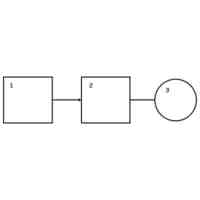
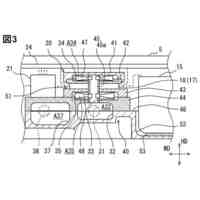
図3は、2相正弦波信号を出力する回転位置検出器を用いて、回転軸の速度制御を行うモータ制御装置の一般的なブロック図である。回転軸には、位置検出器1が取り付けられ、また、回転軸はモータ2によって駆動される。なお、本図において回転軸はモータ2に直結して駆動される例を示しているが、減速機構を介して駆動される場合もある。
【0004】
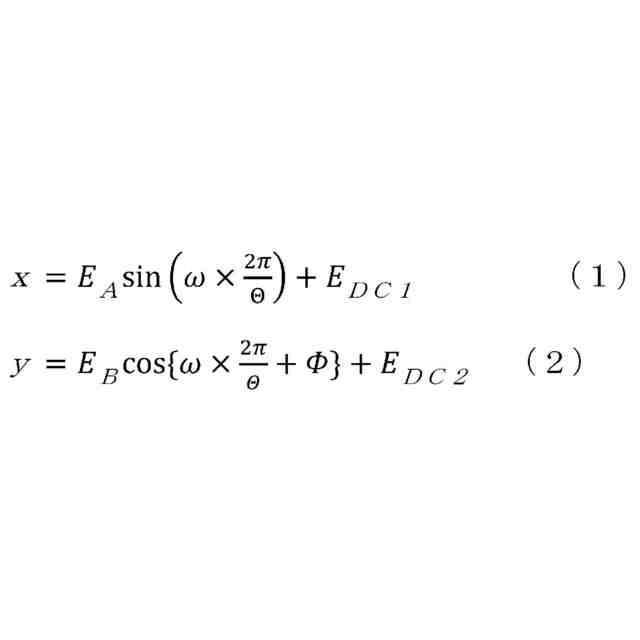
位置検出器1は、回転軸が1回転すると次の式1および式2で表される2相正弦波信号x、yをT周期分、出力する。以下では、信号xを「A相信号」、信号yを「B相信号」と称する場合もある。
JPEG
2025129952000002.jpg
25
170
【0005】
ここで、ωは、位相角(すなわち回転軸の回転角度)である。また、Θは、正弦波信号の周期であり、回転軸1回転の1/Tに相当する。E
A
,E
B
は、2相正弦波信号のそれぞれの振幅であり、理想的にはE
A
=E
B
である。Φは2相正弦波信号の位相差であり、理想的にはゼロであり、ゼロの場合にxとyは、互いにπ/2の位相が異なる直交信号となる。E
DC1
,E
DC2
は2相正弦波信号の直流オフセットであり、理想的にはゼロである。
【0006】
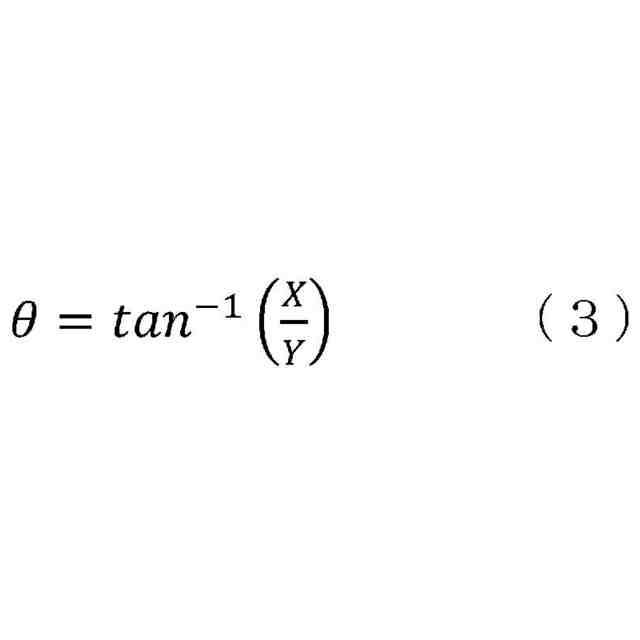
AD変換器3は、上記2相正弦波信号x,yをデジタル変換してX,Yとする。次に内挿演算部4は2相信号のデジタル値X,Yから式3に基づいて正弦波1周期内の位置検出値θを演算する。
JPEG
2025129952000003.jpg
16
170
【0007】
上記θは、回転軸1回転をT周期で分割した位置であるので、1回転全周の角度を検出するために、パルス化回路5は、2相正弦波信号x,yをパルス化し、この2相パルスをカウンタ6がカウントする。すなわち、正弦波信号1周期に対してカウンタ6は、4カウントアップする。なお、図示しないが一般的に位置検出器1は、1回転に1回のマーカ信号を出力しており、カウンタ6は、このマーカ信号でカウントクリアされる。この結果、カウンタ6の出力は、回転軸1回転を0~4Tまでカウントした上位位置データとなり、下位2ビットを切り捨てた値と、正弦波1周期内の位置検出値θを加算器7において合成することにより、回転軸全周の位置検出値となる。
【0008】
これまで述べてきた位置検出値の演算処理は、いずれも検出周期t
S
毎に実行される離散処理である。検出周期の逆数は、サンプリング周波数f
S
であり、求められる制御応答に対して十分に高い必要がある。例えば数100Hzの制御応答が求められる場合には、サンプリング周波数は数kHz~数10kHzに設定されることが一般的である。このようにして得られた位置検出値から、微分器8において検出周期あたりの変化量を算出することにより、速度検出値Vが得られる。
【0009】
速度指令発生部9の出力した速度指令V
C
から減算器10において速度検出値Vを減算し、速度誤差V
DIF
が得られる。この速度誤差V
DIF
は速度制御部11に入力され、増幅されてモータ2を駆動する電流指令となり、インバータ12の入力となる。これら減算器10、速度制御部11、インバータ12の働きによってモータ2は速度指令V
C
に一致した速度で回転するようフィードバック制御される。
【0010】
前述したように、一般的に2相正弦波信号には直流オフセットE
DC1
,E
DC2
と、振幅差(すなわちE
A
とE
B
との差)と、位相差Φと、が含まれる。これらの誤差成分によって、位置検出値には、正しい位置に対する検出誤差Δθが生じる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オークマ株式会社
切粉回収装置
3日前
オークマ株式会社
モータ制御装置
1か月前
個人
電源装置
17日前
個人
バッテリ内蔵直流電源
16日前
株式会社FUJI
制御盤
6日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
トヨタ自動車株式会社
回転子
2日前
日産自動車株式会社
電子機器
27日前
トヨタ自動車株式会社
回転子
17日前
ニデック株式会社
モータの制御方法
24日前
ミサワホーム株式会社
居住設備
6日前
東京応化工業株式会社
発電装置
10日前
井関農機株式会社
充電システム
27日前
トヨタ自動車株式会社
溶接装置
1か月前
大豊工業株式会社
モータ
16日前
株式会社リコー
拡張アンテナ装置
9日前
ニチコン株式会社
AC入力検出回路
2日前
日産自動車株式会社
ステータ
3日前
トヨタ自動車株式会社
ロータ
4日前
富士電子工業株式会社
電力変換装置
18日前
ユタカ電業株式会社
ケーブルダクト
6日前
株式会社大林組
可搬式充電設備
3日前
株式会社デンソー
電力変換装置
2日前
NTN株式会社
モータユニット
6日前
株式会社アイシン
直流回転電機
1か月前
株式会社ダイヘン
電力管理装置
25日前
株式会社ミツバ
巻線装置
9日前
株式会社正興電機製作所
地絡確認装置
9日前
株式会社ダイヘン
変換装置集積体
1か月前
株式会社デンソー
インバータ装置
18日前
株式会社アイシン
回転電機
2日前
カヤバ株式会社
アクチュエータユニット
16日前
株式会社アイシン
駆動装置
4日前
住友電装株式会社
ワイヤハーネス
26日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ