TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133648
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031735
出願日
2024-03-01
発明の名称
車両制御装置、車両制御システム、車両制御方法及びプログラム
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20250904BHJP(信号)
要約
【課題】青信号を誤って検出した場合に車両の交差点への誤進入を防ぐことのできる車両制御装置、車両制御システム、車両制御方法及びプログラムを提供する。
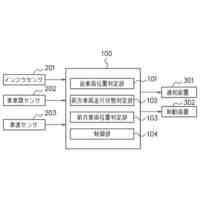
【解決手段】車両制御装置10は、車両1の周囲を撮像する撮像部220と、車両1の位置情報を取得する位置情報取得部210と、信号機の情報を含む地図情報を記憶する地図データベース230と、車両1を制御するコントローラ100を備える。コントローラ100は、位置情報と地図情報とに基づいて推定した信号機の位置と、撮像部220が車両前方を撮像した前方画像とに基づいて信号機信号を判定し、信号機信号の判定結果が進入可信号であるときに、撮像部220が車両1の前方の交差点周辺を撮像した周辺画像から移動体を検出し、移動体の動きに基づいて、信号機信号の確からしさを示す信号確度を算出し、信号確度が予め定めた閾値以下である場合に、車両1を停止線で停止させる制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
車両の周囲を撮像する撮像部と、
前記車両の位置情報を取得する位置情報取得部と、
信号機の情報を含む地図情報を記憶する地図データベースと、
前記位置情報と前記地図情報とに基づいて推定した前記信号機の位置と、前記撮像部が車両前方を撮像した前方画像と、に基づいて信号機信号を判定し、前記信号機信号の判定結果が進入可信号であるときに、前記撮像部が前記車両の前方の交差点周辺を撮像した周辺画像から移動体を検出し、前記移動体の動きに基づいて前記信号機信号の確からしさを示す信号確度を算出し、前記信号確度が予め定めた閾値以下である場合に、前記車両を停止線で停止させる制御を行うコントローラと、を備える、
車両制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記コントローラは、前記信号機信号の判定結果が前記進入可信号であるときに、予め設定された判断時間の間、前記信号確度が前記閾値より高い状態が継続したときに前記停止線を通過させる制御を行う、
請求項1に記載の車両制御装置。
【請求項3】
前記コントローラは、前記信号機信号の判定結果が前記進入可信号であるときに、前記信号確度が高い程、短く設定された判断時間の間、前記信号確度が、前記判断時間に対応づけられた前記閾値より高い状態が継続したときに前記停止線を通過させる制御を行う、
請求項1に記載の車両制御装置。
【請求項4】
前記コントローラは、予め定めた検出エリア内において前記移動体を検出できない場合は、予め定めた速度以下に減速する制御を行う、
請求項1に記載の車両制御装置。
【請求項5】
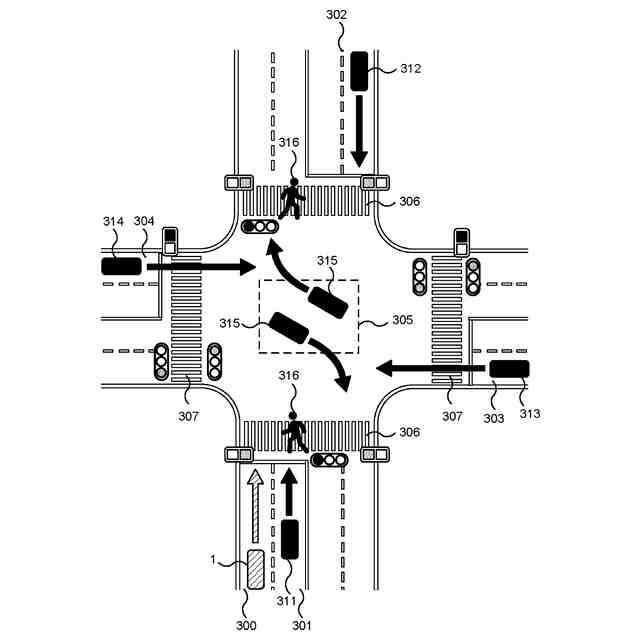
前記コントローラが前記移動体を検出するエリアは、前記車両が走行する自車線と同じ方向の隣車線、前記自車線に対向する対向車線、前記自車線に交差する交差車線、前記交差車線の右左折待ちエリア、前記自車線に交差する交差横断歩道、及び、前記自車線と同じ方向の同方向横断歩道、のうち少なくともいずれか1つの検出エリアであって、
前記移動体は、前記隣車線、前記対向車線、前記交差車線及び前記右左折待ちエリアのうち少なくともいずれか1つの前記検出エリアに存する他車両、又は、前記交差横断歩道及び前記同方向横断歩道の少なくともいずれか1つの前記検出エリアに存する歩行者である、
請求項1に記載の車両制御装置。
【請求項6】
前記コントローラは、前記地図情報から、右左折専用車線の情報を含む車線情報又は前記右左折専用車線から右左折後に走行する車線への車線接続情報を取得し、前記右左折専用車線に存する他車両の動きを含む前記移動体の動きに基づいて前記信号確度を算出する、
請求項1に記載の車両制御装置。
【請求項7】
前記コントローラは、サーバから受信した、前記信号機信号又は信号が変わるタイミングを含む信号情報に基づいて、前記信号確度を算出する、
請求項1に記載の車両制御装置。
【請求項8】
前記コントローラは、歩行者用の信号機又は車両用の信号機から受信した、前記信号機信号又は信号が変わるタイミングを含む信号情報に基づいて、前記信号確度を算出する、
請求項1に記載の車両制御装置。
【請求項9】
前記コントローラは、前記周辺画像のうち、受信した前記信号情報に基づいて選択した検出エリアにおいて、前記移動体を検出し、検出した前記移動体の動きに基づいて前記信号確度を算出する、
請求項7又は請求項8に記載の車両制御装置。
【請求項10】
前記コントローラは、一定時間以内に前記信号機信号が変わることを示す前記信号情報を取得し、前記信号情報に基づいて選択した前記検出エリアにおいて前記移動体を検出する場合の前記閾値は、全検出エリアにおいて前記移動体を検出する場合よりも低い値に設定される、
請求項9に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御システム、車両制御方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
車両の自動運転において、車両の前方を撮影した画像に基づいて、前方の信号機の信号を判定し、判定結果に基づいて車両の走行を制御する技術がある(例えば、特許文献1)。特許文献1に記載の車両制御装置は、前方の信号機の信号を判定できない場合に、車両の周辺の情報の検出結果に基づいて前方の信号機の信号を判定する。
【先行技術文献】
【特許文献】
【0003】
特開2017-182297号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走行中の気象条件、時間帯、混雑状況等の周囲の状況によっては、撮像画像に基づいて前方の信号機の信号を判定する際に、進入不可信号(赤信号等)を進入可信号(青信号等)として誤って判定する場合がある。特許文献1に記載された技術において、前方の信号機の進入不可信号を進入可信号として誤って判定した場合、車両が交差点に誤進入してしまう可能性が生じる。
【0005】
本発明は、上記実情に鑑みてなされたものであり、車両の交差点への誤進入を防止できる車両制御装置、車両制御システム、車両制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
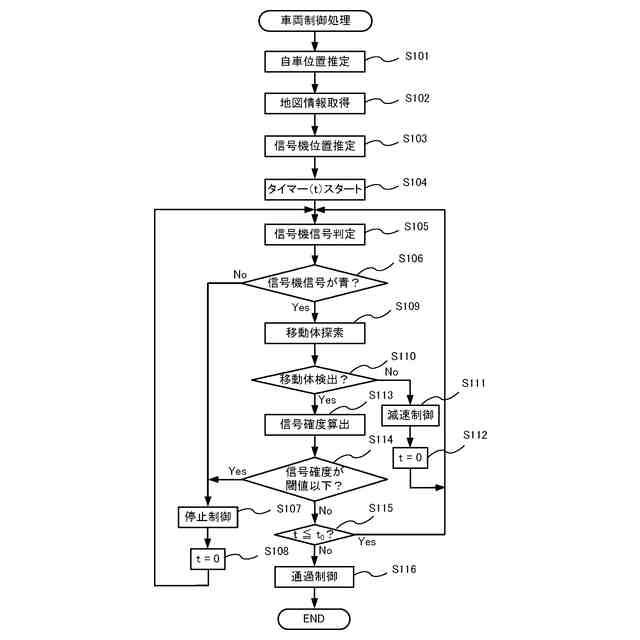
上記目的を達成するために、本発明に係る車両制御装置は、車両の周囲を撮像する撮像部と、車両の位置情報を取得する位置情報取得部と、信号機の情報を含む地図情報を記憶する地図データベースと、車両を制御するコントローラと、を備える。コントローラは、位置情報と地図情報とに基づいて推定した信号機の位置と、撮像部が車両前方を撮像した前方画像と、に基づいて信号機信号を判定し、信号機信号の判定結果が進入可信号であるときに、撮像部が車両の前方の交差点周辺を撮像した周辺画像から移動体を検出し、移動体の動きに基づいて、信号機信号の確からしさを示す信号確度を算出する。コントローラは、算出した信号確度が予め定めた閾値以下である場合に、車両を停止線で停止させる制御を行う。
【発明の効果】
【0007】
本発明によれば、信号機信号の判定結果が進入可信号であるときに信号確度に応じて車両を制御するため、車両の交差点への誤進入を防止することが可能となる。
【図面の簡単な説明】
【0008】
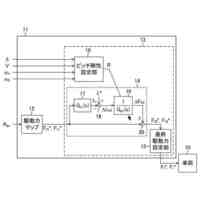
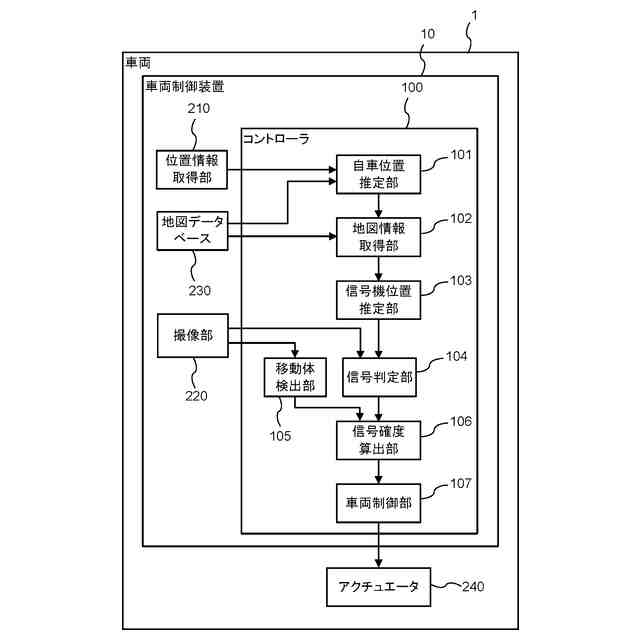
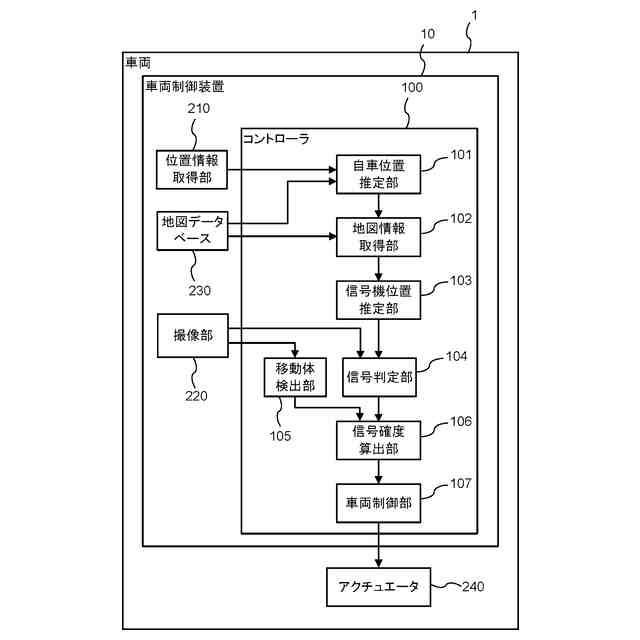
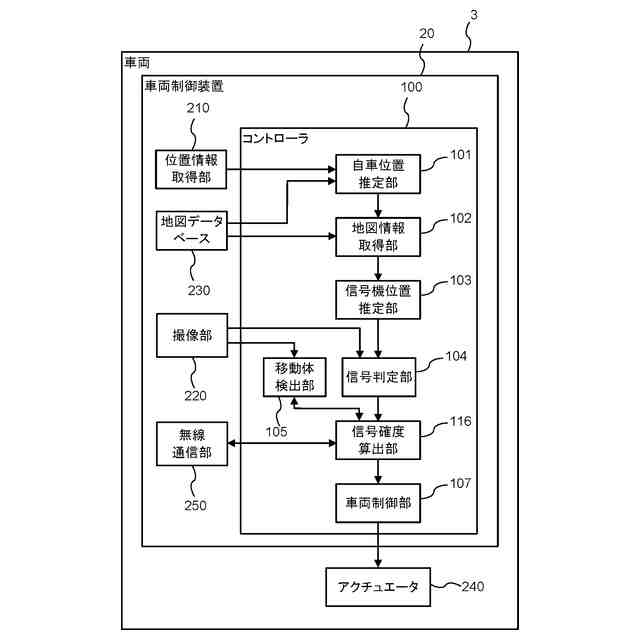
本発明の実施の形態1に係る車両制御装置の機能構成例を示すブロック図である。
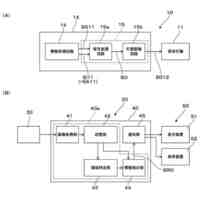
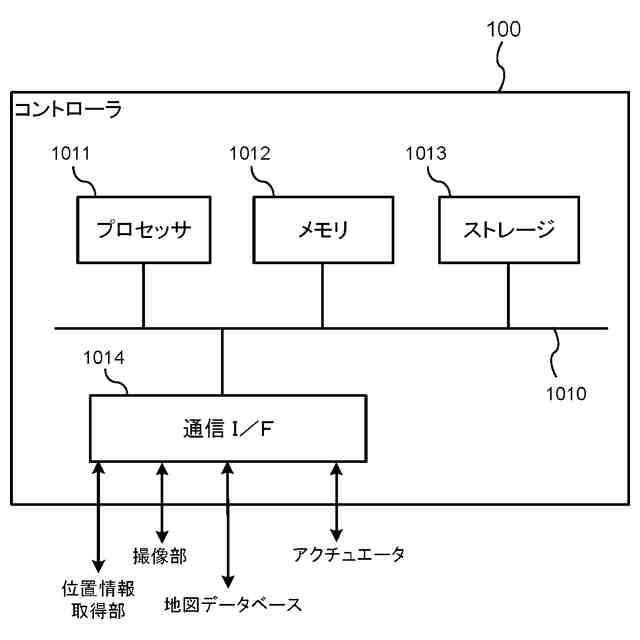
実施の形態1に係るコントローラのハードウェア構成例を示す図である。
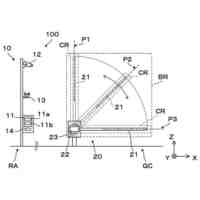
交差点周辺の移動体を示す図である。
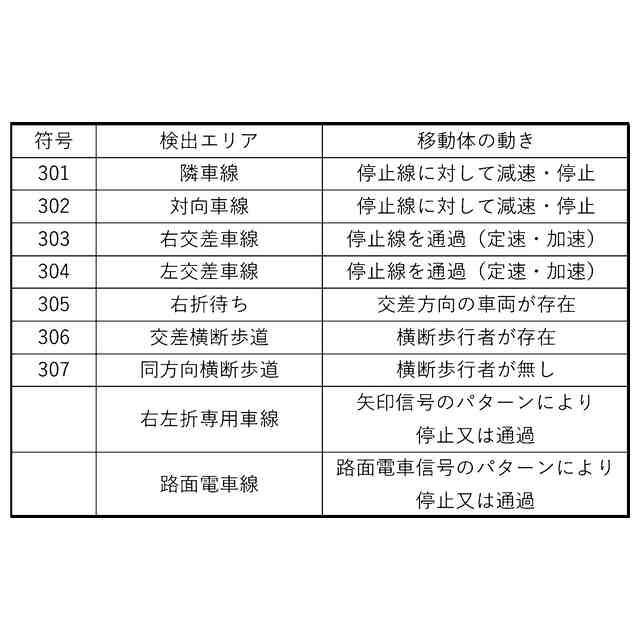
交差点周辺の移動体の動きを示す表である
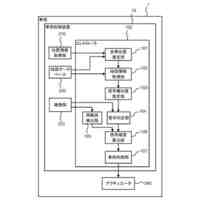
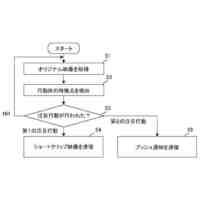
実施の形態1に係る車両制御処理のフローチャートである。
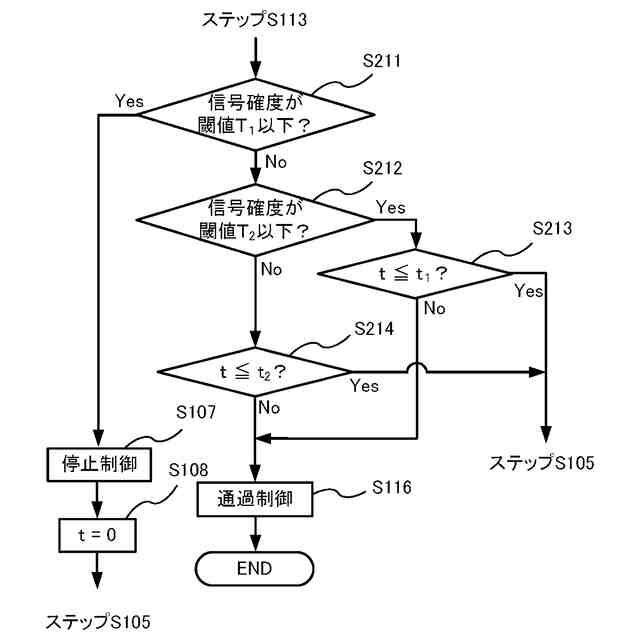
変形例1に係る車両制御処理の一部のフローを示す図である。
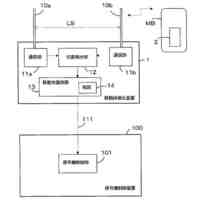
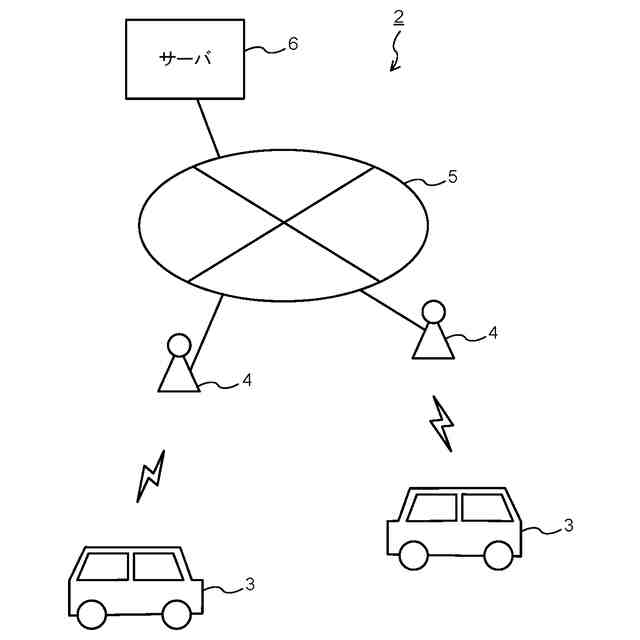
本発明の実施の形態2に係る車両制御システムを示す概略図である。
実施の形態2に係る車両制御装置の機能構成例を示すブロック図である。
実施の形態2に係る車両制御処理の一部のフローを示す図である。
【発明を実施するための形態】
【0009】
図面を参照しながら、本発明の実施の形態に係る車両制御装置、車両制御システム、車両制御方法及びプログラムについて説明する。各図面においては、同一又は同等の部分に同一の符号を付す。
【0010】
(実施の形態1)
本発明の実施の形態1に係る車両制御装置10は、車両1の走行を制御する装置である。例えば、車両制御装置10は、車両1の各部を駆動するアクチュエータ240を制御することにより、車両1の自動運転を実現する。本実施の形態では、車両制御装置10は、レベル4の自動運転を制御することを想定しているが、他のレベルでもよい。なお、車両制御装置10は、自動運転を制御するものに限定されず、ブレーキ補助、操舵補助等を行う運転支援の制御を行うものであってもよい。図1は、本実施の形態に係る車両制御装置10の機能構成例を示す図であるが、本実施の形態に係る、信号機信号の判定及び信号確度に基づく制御に関わる部分を記載している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
電子機器
5日前
日産自動車株式会社
電力変換装置
16日前
日産自動車株式会社
全天球撮像装置
4日前
日産自動車株式会社
バッテリケース
15日前
日産自動車株式会社
車両の遮熱構造
15日前
日産自動車株式会社
マフラーマウントの遮熱構造
12日前
日産自動車株式会社
情報処理方法及び情報処理装置
5日前
日産自動車株式会社
配車管理装置及び配車管理方法
16日前
日産自動車株式会社
内燃機関およびその排気系設計方法
10日前
日産自動車株式会社
内燃機関の再始動制御方法および装置
3日前
日産自動車株式会社
車両データ処理装置及び車両データ処理方法
10日前
日産自動車株式会社
ブレーキ異音検知方法、装置およびプログラム
5日前
日産自動車株式会社
ピッチ挙動制御方法、及び、ピッチ挙動制御装置
8日前
日産自動車株式会社
車両制御装置、車両制御システム、車両制御方法及びプログラム
2日前
日産自動車株式会社
移動計画策定装置、移動管理システム、移動計画策定方法及びプログラム
4日前
日本精機株式会社
警報システム
12日前
日本精機株式会社
路面投影装置
2か月前
エムケー精工株式会社
車両誘導装置
18日前
スズキ株式会社
運転支援装置
11日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
5日前
株式会社国際電気
防災システム
15日前
ニッタン株式会社
検知器
3日前
ニッタン株式会社
検知器
3日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
トヨタ自動車株式会社
車両
1か月前
TOA株式会社
拡声放送システム
2か月前
株式会社アジラ
データ転送システム
2か月前
個人
乗り物の移動を支援する方法及び装置
1か月前
株式会社JVCケンウッド
警報装置
2か月前
日本信号株式会社
信号情報システム
2か月前
日本信号株式会社
情報提供システム
2か月前
株式会社小糸製作所
移動体検出装置
5日前
株式会社小糸製作所
車両検出システム
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ