TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142186
公報種別
公開特許公報(A)
公開日
2025-09-30
出願番号
2024199031
出願日
2024-11-14
発明の名称
計算装置
出願人
個人
代理人
弁理士法人みなとみらい特許事務所
主分類
G06N
99/00 20190101AFI20250922BHJP(計算;計数)
要約
【課題】g
1
(u)とg
2
(u)についての非負制約を撤去して,正値と負値の両方を可能とすることで,より数学的に洗練された関数を生成する方法を提供する。
【解決手段】円や球を導入して,g
1
(u)とg
2
(u)の値を制御する。数理最適化の目的関数や制約式,あるいは,回帰モデルの回帰式として使用できる2変数関数をu=F(x
1
,x
2
)としたとき,この関数を,「u=g
1
(u)f
1
(x
1
)+g
2
(u)f
2
(x
2
)」のような代数的にはuについて解けないので式(陰関数)で実現した数値計算可能な効用関数の具体的な式を,観察データから生成する。円や球を使ってg
1
とg
2
の値をuに応じて変化させる。
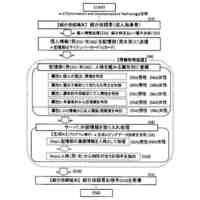
【選択図】図2
特許請求の範囲
【請求項1】
財の消費量x
n
と、人が感じる効用uと、により表される効用関数を計算する計算装置であって、
記憶装置と、演算装置と、を備え、
前記記憶装置は、効用関数をu=F(x
1
,x
2
)としたとき、[数145]という陰関数で表現でき、f
1
(x
1
),f
2
(x
2
)は実数値関数である効用関数を記憶し、
前記演算装置は、
f
1
(x
1
)とf
2
(x
2
)の値域を囲むf
1
f
2
平面上の円及び楕円を含む円類似物を生成する(1)処理と、
前記円類似物上を移動する動点であって、uの値に応じて移動する第1動点S
1
及び第2動点S
2
を生成する(2)処理と、
前記第1動点S
1
及び前記第2動点S
2
を通る等高直線を生成する(3)処理と、
前記等高直線と、f
1
(x
1
),f
2
(x
2
)と、に基づいて前記陰関数におけるg
0
(u),g
1
(u),g
2
(u)の値を決定する(4)処理と、
x
1
とx
2
の入力を受け付け、前記陰関数を満たす効用uの数値解を導出し、u=f(x
1
,x
2
)の値として出力する(5)処理と、を実行し、
前記(2)処理は、前記第1動点の始点と、前記第2動点の始点と、第1動点及び第2動点に共通する終点と、を設定し、前記第1動点は、効用uの増加と共に前記第1動点の始点から終点に第1の方向に移動し、前記第2動点は、効用uの増加と共に前記第2動点の始点から終点に前記第1の方向と反対方向に移動する、計算装置。
[数145] g
0
(u)=g
1
(u)f
1
(x
1
)+g
2
(u)f
2
(x
2
)
g
0
(u),g
1
(u),g
2
(u)は,その値がuに応じて移動する動点である第1動点と第2動点を通る等高直線の式をもとに算出される実数値の関数。
続きを表示(約 5,100 文字)
【請求項2】
前記記憶装置は、
前記等高直線の式である[数146]と、式[数147]と、式[数148]と、f
1
f
2
平面上の円の式である[数149]と、を記憶し、
前記演算装置は、
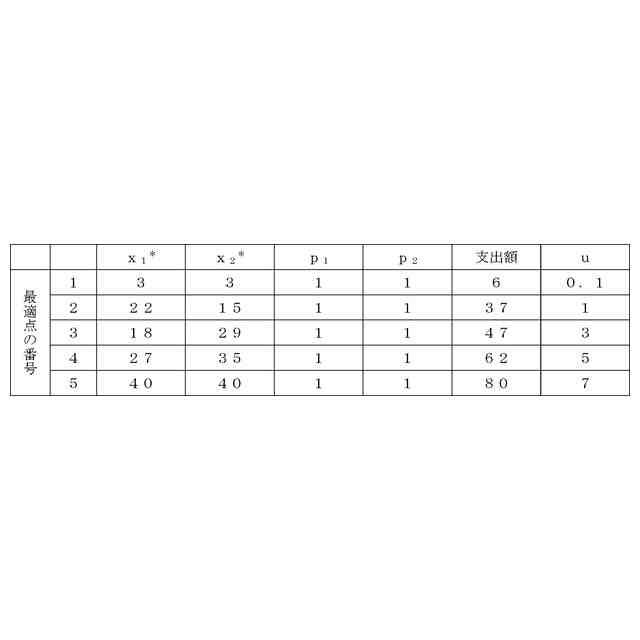
u
*
=F(x
1
*
,x
2
*
)が成り立つ場合において、(x
1
*
,x
2
*
,u
*
,p
1
,p
2
)の組を有する入力データを受け付け、
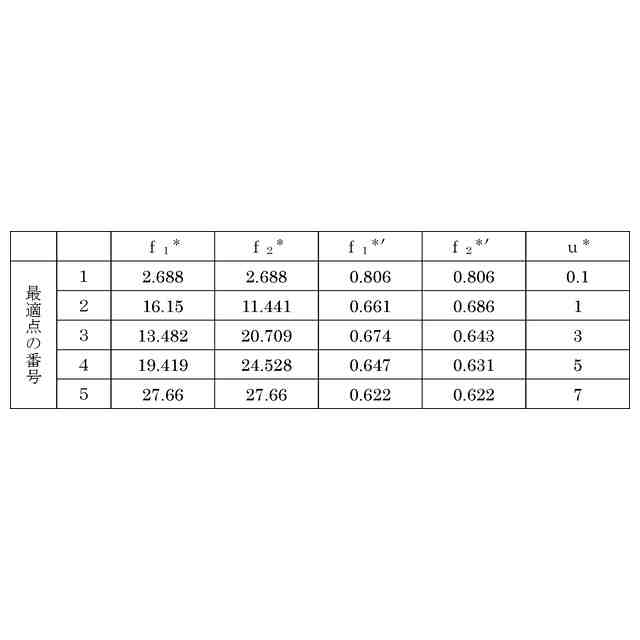
f
1
(x
1
*
)
2
+f
2
(x
2
*
)
2
≦半径となる半径の入力を受け付け、
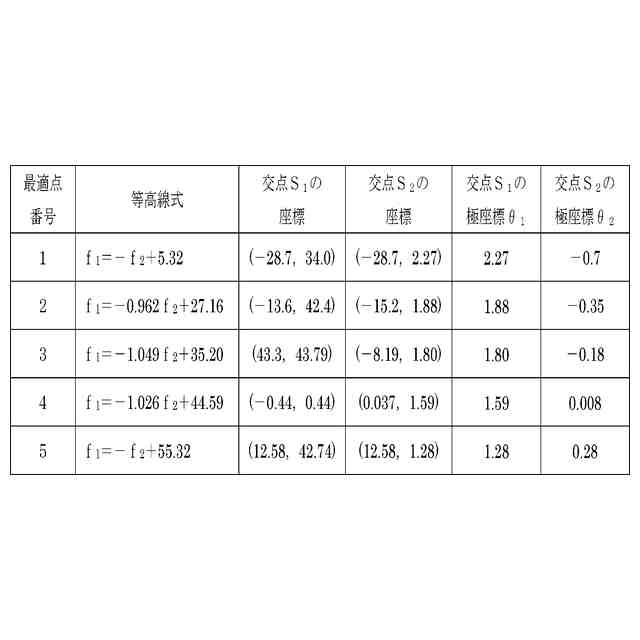
前記円及び、前記等高直線の2つの交点である第1座標及び第2座標を算出し、
前記入力データの組についてn個の入力を受け付けると、それぞれの入力データの組に対応する前記第1座標及び前記第2座標の組をn個生成し、
前記第1座標から入力データのu
*
への回帰及び、第2座標から入力データのu
*
への回帰を行うことで、前記第1座標をuの変数で表現する第1の式と、前記第2座標をuの変数で表現する第2の式と、を生成し、
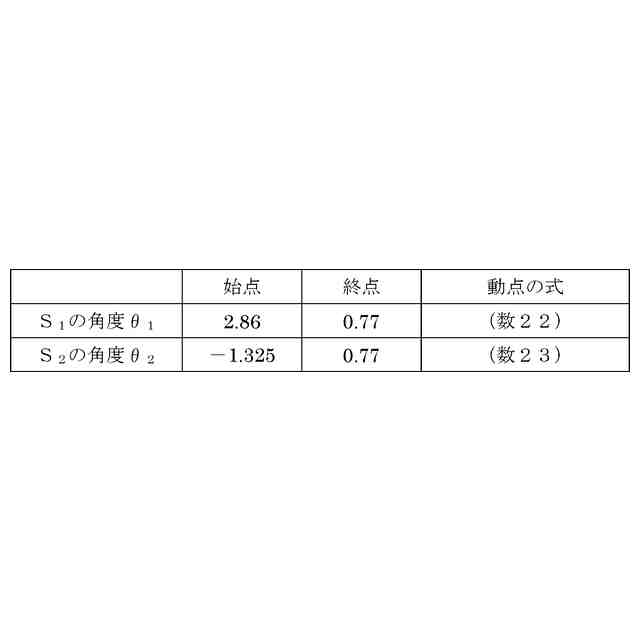
前記第1の式は、uの値に応じた前記第1動点S
1
の移動を表し、前記第2の式は、uの値に応じた前記第2動点S
2
の移動を表す、請求項1に記載の計算装置。
[数146] β
1
(f
1
-f
1
(x
1
*
))+β
2
(f
2
-f
2
(x
2
*
))=0
[数147] β
k
=(p
k
/p
1
)×(f
1
′(x
1
*
)/f
k
′(x
k
*
【請求項3】
財の消費量x
n
と、人が感じる効用uと、により表される効用関数を計算する計算装置であって、
記憶装置と、演算装置と、を備え、
前記記憶装置は、効用関数をu=F(x
1
,x
2
,x
3
)としたとき、[数150]という陰関数で表現でき、f
1
(x
1
)~f
3
(x
3
)は実数値関数である効用関数を記憶し、
前記演算装置は、
f
1
(x
1
),f
2
(x
2
),f
3
(x
3
)の値域を囲むf
1
f
2
f
3
空間上の真球及び楕円球を含む球類似物を生成する(1)処理と、
前記球類似物を移動する動点であって、uの値に応じて移動する3つの動点(S
1
,S
2
,S
3
)を生成する(2)処理と、
前記3つの動点(S
1
,S
2
,S
3
)を通る平面である等高平面を生成する(3)処理と、
前記等高平面と、f
1
(x
1
),f
2
(x
2
),f
3
(x
3
)と、に基づいて前記陰関数におけるg
0
(u),g
1
(u),g
2
(u)の値を決定する(4)処理と、
x
1
,x
2
,x
3
の入力を受け付け、前記陰関数を満たす効用uの値を導出し、u=f(x
1
,x
2
,x
3
)の値として出力する(5)処理と、を実行し、
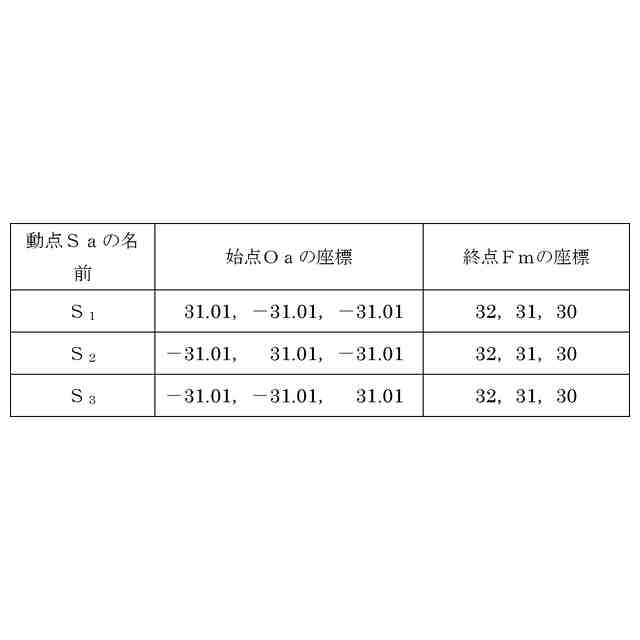
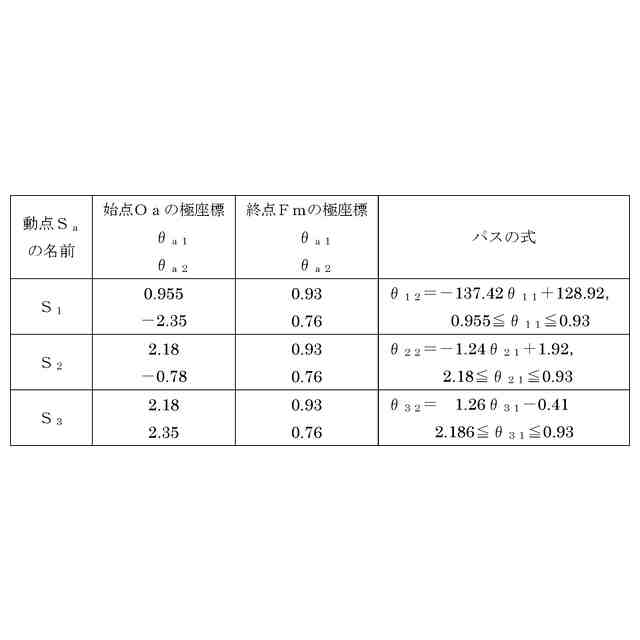
前記(2)処理は、前記3つの動点のそれぞれの始点と、それぞれの動点に共通の終点と、前記始点から前記終点までの移動経路であるそれぞれのパスと、を設定し、効用uの増加と共にそれぞれの動点が前記始点から前記終点まで前記パスにしたがって移動する、計算装置。
[数150] g
0
(u)=g
1
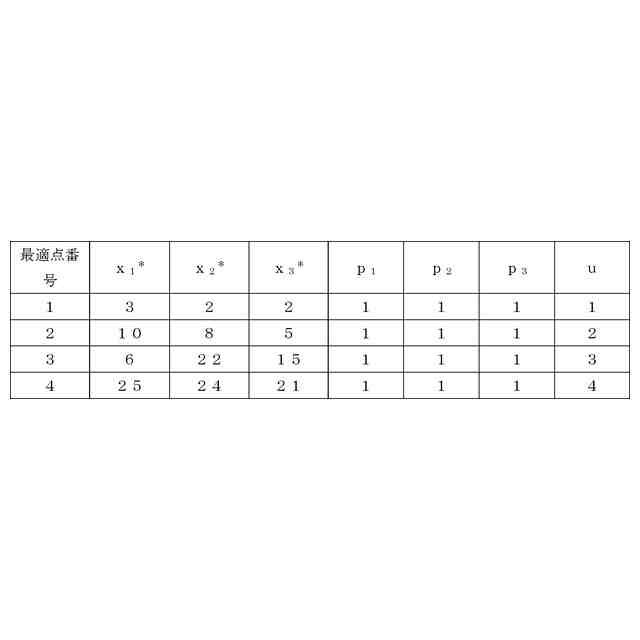
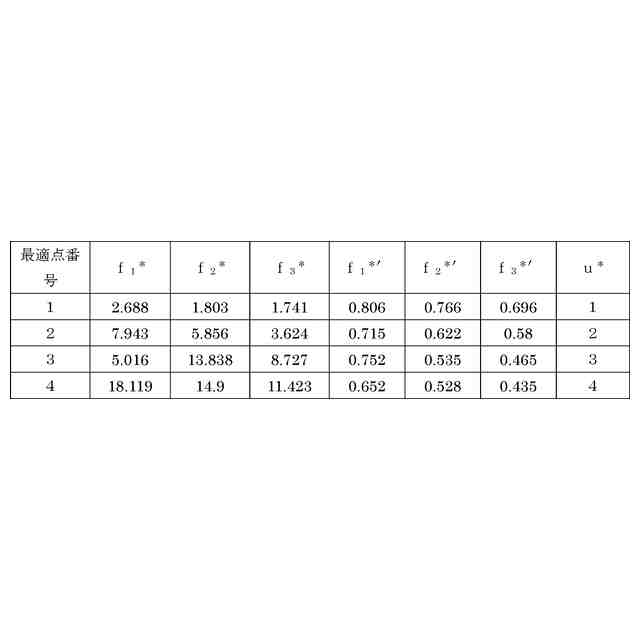
【請求項4】
前記記憶装置は、
前記等高平面の式である[数151]と、式[数152]と、式[数153]と、f
1
f
2
f
3
座標上の球の式である[数154]と、を記憶し、
前記演算装置は、
u=F(x
1
,x
2
,x
3
)が成り立つ場合において、(x
1
*
,x
2
*
,x
3
*
,u
*
,p
1
,p
2
,p
3
)の組を有する入力データを受け付け、
f
1
(x
1
*
)
2
+f
2
(x
2
*
)
2
+f
3
(x
3
*
)
2
≦半径となる半径及び、3つの動点の経路となる3つのパスの入力を受け付け、
前記球に設定された前記パス及び、前記等高平面の3つの交点である第1座標、第2座標及び第3座標を算出し、
前記入力データの組についてn個の入力を受け付けると、それぞれの入力データの組に対応する前記第1座標、前記第2座標及び、前記第3座標の組をn個生成し、
前記第1座標から入力データのu
*
への回帰、前記第2座標から入力データのu
*
への回帰及び、前記第3座標から入力データのu
*
への回帰を行うことで、前記第1座標をuの変数で表現する第1の式と、前記第2座標をuの変数で表現する第2の式と、前記第3座標をuの変数で表現する第3の式と、を生成し、
前記第1の式は、uの値に応じた前記第1動点S
1
の移動を表し、前記第2の式は、uの値に応じた前記第2動点S
2
の移動を表し、前記第3の式は、uの値に応じた前記第3動点S
3
の移動を表す、請求項3に記載の計算装置。
[数151] β
1
(f
1
-f
1
(x
1
*
))+β
2
(f
2
-f
2
(x
2
*
))+β
3
【請求項5】
財の消費量x
n
と、人が感じる効用uと、により表される効用関数を計算する計算装置であって、
記憶装置と、演算装置と、を備え、
前記記憶装置は、効用関数u=F(x
1
,…,x
n
)としたとき(n≧2)、[数155]という陰関数で表現でき、f
1
(x
1
),…,f
n
(x
n
)は実数値関数である効用関数を記憶し、
前記演算装置は、
f
1
(x
1
),…,f
n
(x
n
)の値域を囲むf
1
…f
n
空間上のn次元の図形を生成する(1)処理と、
前記n次元の図形を移動する動点であって、uの値に応じて移動するn個の動点を生成する(2)処理と、
前記n個の動点を通る生成図形を生成する(3)処理と、
前記生成図形と、f
1
(x
1
),…,f
n
(x
n
)と、に基づいて前記陰関数におけるg
0
(u),g
1
(u),…,g
n
(u)の値を決定する(4)処理と、
x
1
,…,x
n
の入力を受け付け、前記陰関数を満たす効用uの値を導出し、u=f(x
1
,…,x
n
)の値として出力する(5)処理と、を実行し、
前記(2)処理は、前記n個の動点のそれぞれの始点と、それぞれの動点に共通の終点と、前記始点から前記終点までの移動経路であるそれぞれのパスと、を設定し、効用uの増加と共にそれぞれの動点が前記始点から前記終点まで前記パスにしたがって移動する、計算装置。
[数155] g
0
(u)=g
1
(u)f
1
(x
1
)+…g
n
(u)f
n
(x
n
)
g
0
(u),g
1
(u),…,g
n
(u)は,その値がuに応じて移動するn個の動点を通る生成図形の式をもとに算出される実数値の関数。
【請求項6】
前記記憶装置は、
前記生成図形の式である[数156]と、式[数157]と、式[数158]と、f
1
…f
n
座標上のn次元図形の式である[数159]と、を記憶し、
前記演算装置は、
u=F(x
1
,…,x
n
)が成り立つ場合において、(x
1
*
,…,x
n
*
,u
*
,p
1
,…,p
n
)の組を有する入力データを受け付け、
f
1
(x
1
*
)
2
+…+f
n
(x
n
*
)
2
≦半径となる半径及び、n個の動点の経路となるn個のパスの入力を受け付け、
前記n次元図形に設定された前記パス及び、前記生成図形のn個の交点である第1座標~第n座標を算出し、
前記入力データの組についてn個の入力を受け付けると、それぞれの入力データの組に対応する前記第1座標~前記第n座標の組をn個生成し、
前記第1座標~第n座標から入力データのu
*
へのそれぞれの回帰を行うことで、前記第1座標~前記第n座標をuの変数で表現する第1の式~第nの式をそれぞれ生成し、
前記第1の式は、uの値に応じた第1動点S
1
の移動を表し、前記第nの式は、uの値に応じた第n動点S
n
の移動を表す、請求項5に記載の計算装置。
[数156] β
1
(f
1
-f
1
(x
1
*
))+…+β
n
(f
n
-f
n
(x
n
*
))=0
[数157]β
k
=(p
k
/p
1
)×(f
1
′(x
1
*
)/f
k
′(x
k
*
)),k=1~n
[数158] p
1
(x
1
発明の詳細な説明
【技術分野】
【0001】
円や球を利用したトラクタブルな効用関数と,それをデータから生成する方法の発明に関する。また、数理最適化,人工知能に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
x
1
,x
2
で第1財と第2財の消費量,uで人が感じる効用を表すと,効用関数はu=f(x
1
,x
2
)と表される。p
1
,p
2
を各財の価格とすると,費用はp
1
x
1
+p
2
x
2
である。経済学では,目標として実現したいuをu
0
に設定し最小化問題「min
x1x2
p
1
x
1
+p
2
x
2
,s.t f(x
1
,x
2
)-u
0
=0」をソルバーで解いて,最適なx
1
,x
2
を求める。具体的な効用関数の式としては
u=x
1
+x
2
,u=logx
1
+logx
2
,
u=x
1
0.7
x
2
0.3
のようなものがあり,凸であると望ましい。ところが,凸な関数は一般的な定義は明瞭であるが,具体的に式を示そうとする案外難しく,数式が複雑でトラクタブルでなかったり,2変数のみで多変数化ができないものになりがちである。
【0003】
上の問題を解決した多変数化できるトラクタブルな効用関数の発明が(特許文献1)である。その効用関数は,非線形,多変数,凸,かつ,関数の一部を観察データから生成可能という特徴を備えていた。例としては,u=x
1
0.8
+x
2
0.9
という普通の凸関数と似ているが,その係数にg
1
(u)とg
2
(u)を充てた
[数1]u=g
1
(u)x
1
0.8
+g
2
(u)x
2
0.9
,ただしg
1
(u)
,
g
2
(u)は正値のuの非増加関数
という陰関数となっている。
【0004】
(数1)を更に分かり易くするために,具体例を示すと,g
1
(u)=1/u
1.1
,g
2
(u)=1/u
1.3
と特定化して,
[数2]u=(1/u
1.1
)x
1
0.8
+(1/u
1.3
)x
2
0.9
が具体例となる。(数2)は,代数的にuについて解けないので,u=~の形で関数を表現できない。しかし,(数2)はuの正値の実数解は1つしかない。そのuの正値の値をコンピュータで計算することで,あたかも関数のように使うことができる。そして,u=1の等高線は,1=x
1
0.8
+x
2
0.9
となり,(x
1
,x
2
)平面上に描いた等高線は,原点に対して凸になるので,(数2)は,最適化では便利な性質である凸性を備えるのである。更に,(数2)は陰関数であるが,右辺を文字列としてみると,(1/u
1.1
)x
1
0.8
と(1/u
1.3
)x
2
0.9
という項を足算でつなげた文字構造であるので,第3の変数としてx
3
を追加するには,文字列の処理としては変数x
3
を含んだ項を足算で追加すれば済む。このため,極めて直観的に多変数化できる。
【0005】
(数1)や(数2)のような陰関数による効用関数を一般化して表すと,
[数3]u=g
1
(u)f
1
(x
1
)+g
2
(u)f
1
(x
2
), ただし,g
1
(u),g
2
(u)は非負の非増加関数,f
1
(x
1
),f
2
(x
2
)は非負の関数
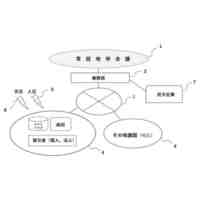
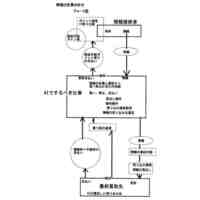
として表現される。(特許文献1)の請求項1と,(特許文献2:fの生成)は,これが効用関数である。
【0006】
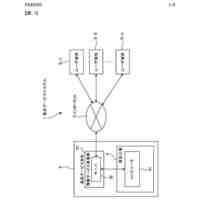
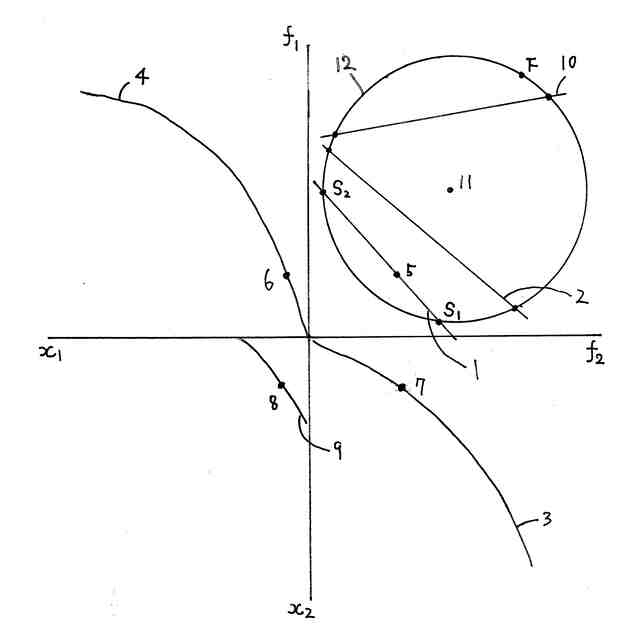
(図1)は効用関数の分解図である。分解図は,実施態様1や実施態様3の効用関数を分かり易くするためのツールである。(数3)は「u=g
1
(u)f
1
(x
1
)+g
2
(u)f
1
(x
2
)」という陰関数であり,どのような関数なのかイメージが難しい。(図1)の分解図を使うと,(数3)の見通しがかなり良くなり,利便性が向上する。
【0007】
(数3)をf
1
とf
2
を変数としてみて,縦軸にf
2
,横軸にf
1
をとって,所与の一定のuについてu=g
1
(u)f
1
+g
2
(u)f
1
のグラフを書くと,傾き-g
1
(u)/g
2
(u),切片u/g
2
(u)の直線であるから,(図1)の第1象限の直線1のようになる。
なお,この(数3)のf
1
とf
2
を変数とみた1次式u=g
1
(u)f
1
+g
2
(u)f
1
を等高線式と呼び,そのグラフを直線ともいうが等高直線とよぶ。等高直線は(図1)の分解図の第1象限に描かれる。
【0008】
(数3)のうち,f
1
(x
1
)だけを取り出して,第4象限にグラフを曲線4として描く。同様に,f
2
(x
2
)だけを取り出して,第2象限にグラフを曲線6として描く。
【0009】
直線1の上に,点3をとる。次に,点3の真左に点7をとり,点3の真下に点5をとる。そして,点7の真下かつ点5の真横に点9をとる。点9は,点3のuの値を与える(x
1
,x
2
)座標を与えている。そして,点3を直線1に沿って,左上や右下方向に移動させると,点7,点5,点9が連動して移動する。このときの点9の軌跡が曲線8である。曲線8上の点のuの値は,直線1の点3と同じであるから,曲線8は(数3)のuの等高線である。
【0010】
(図1)の第1象限の直線2は,直線1からuの値が上昇したときの直線である。このとき直線1と直線2は交点がない。なぜならば,uの値が上昇すると,u=g
1
(u)f
1
+g
2
(u)f
2
のうちの左辺のuが上昇し,かつ,右辺はg
1
′≦0,g
2
′≦0であるから,直線1は一様に右シフトするからである。(ただし,厳密には,「g
1
′=0かつg
2
′=0」のときはシフトしないので,ゼロになれるのは一方のみ。)この一様な右シフトは一般的には非平行なシフトとなる。つまり,直線1や直線2の傾きは,-(g
1
(u)/g
2
(u))であるが,この分母と分子が共に非負の非増加関数だから,傾きはuの上昇につれて急勾配にも緩勾配にも変化しうる。そして,直線2についても第3象限に点9のような軌跡をとると,直線2に対応した等高線が曲線10のように描ける。そして,(図1)の直線1から直線2へのシフトは,非平行なシフトであるので,第3象限の曲線8と曲線10は,この非平行シフトを反映して,様々な形に変化し,最適点がS字型などの多彩な最適点の並びになるような等高線も実現できるのである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
工程設計支援装置
1か月前
個人
地球保全システム
4日前
個人
フラワーコートA
1か月前
個人
冷凍食品輸出支援構造
1か月前
個人
介護情報提供システム
2か月前
個人
為替ポイント伊達夢貯
1か月前
個人
携帯情報端末装置
1か月前
個人
表変換編集支援システム
24日前
個人
結婚相手紹介支援システム
1か月前
個人
知財出願支援AIシステム
1か月前
個人
AIによる情報の売買の仲介
1か月前
個人
行動時間管理システム
26日前
個人
パスワード管理支援システム
24日前
個人
AIキャラクター制御システム
24日前
株式会社キーエンス
受発注システム
3日前
株式会社アジラ
進入判定装置
1か月前
株式会社キーエンス
受発注システム
3日前
個人
アンケート支援システム
2か月前
株式会社キーエンス
受発注システム
3日前
日本精機株式会社
施工管理システム
1か月前
個人
食品レシピ生成システム
3日前
個人
海外支援型農作物活用システム
16日前
個人
パスポートレス入出国システム
1か月前
個人
システム及びプログラム
17日前
個人
音声対話型帳票生成支援システム
24日前
個人
SaaS型勤務調整支援システム
24日前
個人
未来型家系図構築システム
16日前
個人
食事受注会計処理システム
1か月前
個人
冷凍加工連携型農場運用システム
1か月前
大阪瓦斯株式会社
住宅設備機器
1か月前
個人
人格進化型対話応答制御システム
24日前
個人
ジェスチャーパッドのガイド部材
2か月前
個人
社会還元・施設向け供給支援構造
24日前
キヤノン株式会社
表示システム
3日前
サクサ株式会社
中継装置
2か月前
サクサ株式会社
中継装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ