TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025143042
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042727
出願日
2024-03-18
発明の名称
車両運転支援装置、車両運転支援方法及び車両運転支援プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20250924BHJP(鉄道以外の路面車両)
要約
【課題】操舵支援制御を停止するときに自車両の操作者に違和感を与えてしまうことを抑制することができる車両運転支援装置を提供する。
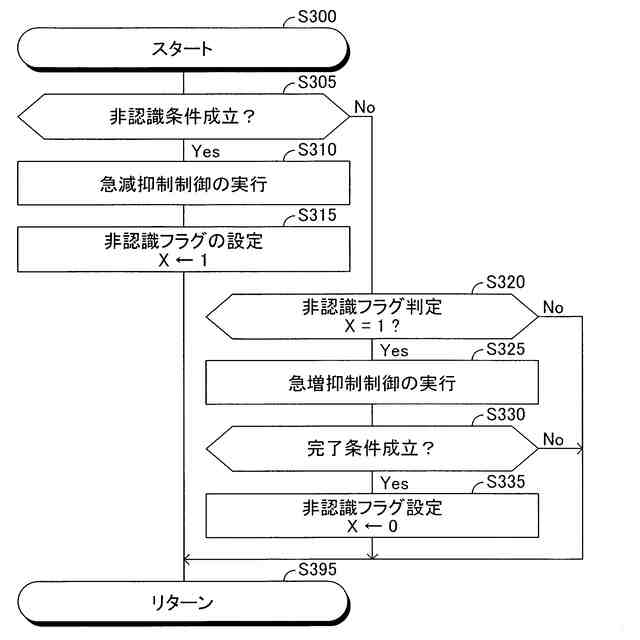
【解決手段】車両運転支援装置10は、走路境界を認識することができなくなった時点で操舵操作に付加されている操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行する。急減抑制制御は、実付加トルクを、走路境界を認識することができなくなった時点の実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、走路境界を認識することができなくなった時点で操舵支援制御により設定されている限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を限度舵角として用いて設定される操舵支援トルクを操舵操作に付加する制御である。
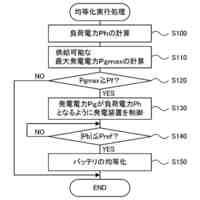
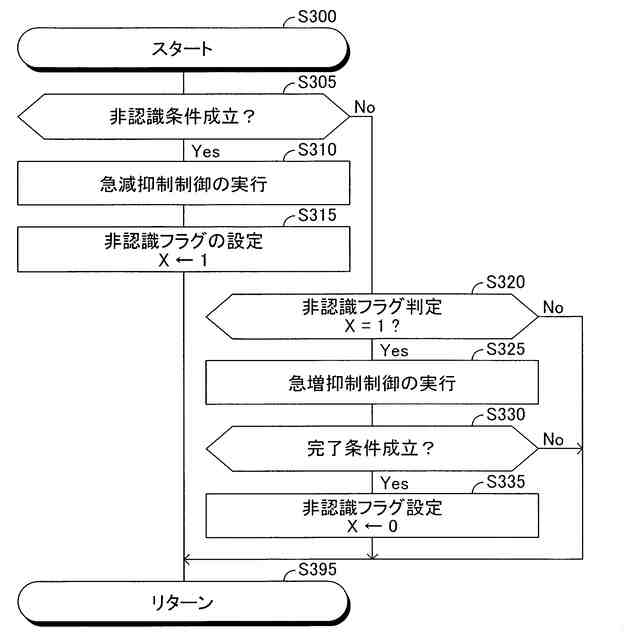
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の操作者が行う操舵操作を支援するために前記操舵操作に抗する操舵支援トルクを前記操舵操作に付加する操舵支援制御を実行する制御装置を備え、
前記制御装置は、
前記自車両が走行している車線を規定する境界である走路境界を認識することができている場合、前記操舵支援制御を実行し、
前記走路境界を認識することができなくなった場合、前記操舵支援制御を停止する、
ように構成されており、
前記操舵支援制御は、前記走路境界に対する前記自車両の位置に基づいて限度舵角を設定し、該限度舵角よりも前記自車両の実舵角が大きい場合、前記限度舵角と前記実舵角との差に基づいて設定される値の前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援装置において、
前記制御装置は、前記走路境界を認識することができなくなった時点で前記操舵操作に付加されている前記操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行するように構成されており、
前記急減抑制制御は、前記実付加トルクを、前記走路境界を認識することができなくなった時点の前記実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、前記走路境界を認識することができなくなった時点で前記操舵支援制御により設定されている前記限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記走路境界を認識することができなくなった後、前記走路境界を認識することができるようになった時点で前記操舵支援制御により設定される前記操舵支援トルクがその時点における前記実付加トルクよりも大きい場合、急増抑制制御を実行してから前記操舵支援制御を実行するように構成されており、
前記急増抑制制御は、前記実付加トルクを単位時間当たり所定の急増抑制値ずつ大きくする制御、又は、前記走路境界を認識することができるようになった時点の前記実舵角から単位時間当たり所定の急増抑制角度ずつ小さくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援装置。
【請求項3】
自車両の操作者が行う操舵操作を支援するために前記操舵操作に抗する操舵支援トルクを前記操舵操作に付加する操舵支援制御を実行する車両運転支援方法であって、
前記自車両が走行している車線を規定する境界である走路境界を認識することができている場合、前記操舵支援制御を実行する工程と、
前記走路境界を認識することができなくなった場合、前記操舵支援制御を停止する工程と、
を有しており、
前記操舵支援制御は、前記走路境界に対する前記自車両の位置に基づいて限度舵角を設定し、該限度舵角よりも前記自車両の実舵角が大きい場合、前記限度舵角と前記実舵角との差に基づいて設定される値の前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援方法において、
前記走路境界を認識することができなくなった時点で前記操舵操作に付加されている前記操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行する工程を更に有しており、
前記急減抑制制御は、前記実付加トルクを、前記走路境界を認識することができなくなった時点の前記実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、前記走路境界を認識することができなくなった時点で前記操舵支援制御により設定されている前記限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援方法。
【請求項4】
自車両の操作者が行う操舵操作を支援するために前記操舵操作に抗する操舵支援トルクを前記操舵操作に付加する操舵支援制御を実行する車両運転支援プログラムであって、
前記自車両が走行している車線を規定する境界である走路境界を認識することができている場合、前記操舵支援制御を実行し、
前記走路境界を認識することができなくなった場合、前記操舵支援制御を停止する、
ように構成されており、
前記操舵支援制御は、前記走路境界に対する前記自車両の位置に基づいて限度舵角を設定し、該限度舵角よりも前記自車両の実舵角が大きい場合、前記限度舵角と前記実舵角との差に基づいて設定される値の前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援プログラムにおいて、
前記走路境界を認識することができなくなった時点で前記操舵操作に付加されている前記操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行するように構成されており、
前記急減抑制制御は、前記実付加トルクを、前記走路境界を認識することができなくなった時点の前記実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、前記走路境界を認識することができなくなった時点で前記操舵支援制御により設定されている前記限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である、
車両運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置、車両運転支援方法及び車両運転支援プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
自車両の操作者が行う操舵操作を支援するために操舵操作に抗する操舵支援トルクを操舵操作に付加する操舵支援制御を実行する車両運転支援装置が出願されている(例えば、特願2023-61204参照)。
【発明の概要】
【0003】
上述した従来の車両運転支援装置において、操舵支援制御が停止されると、操舵操作に付加される操舵支援トルクが突然ゼロとなるので、自車両の操作者に違和感を与えてしまう可能性がある。
【0004】
本発明の目的は、操舵支援制御を停止するときに自車両の操作者に違和感を与えてしまうことを抑制することができる車両運転支援装置、車両運転支援方法及び車両運転支援プログラムを提供することにある。
【0005】
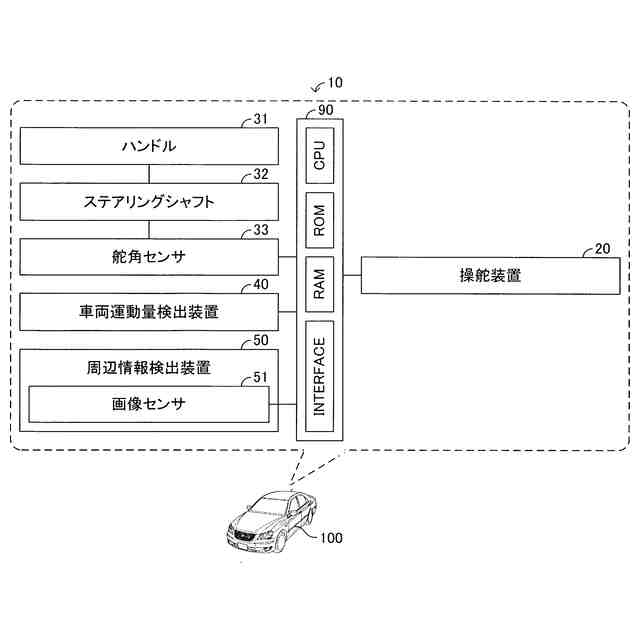
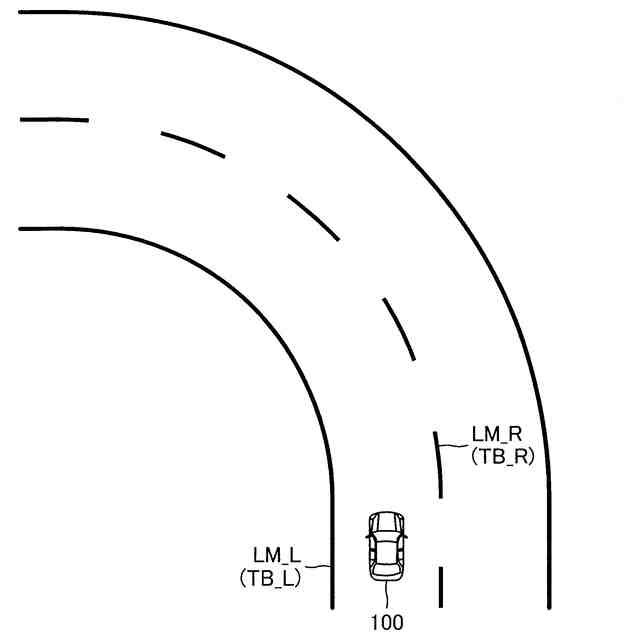
本発明に係る車両運転支援装置は、自車両の操作者が行う操舵操作を支援するために前記操舵操作に抗する操舵支援トルクを前記操舵操作に付加する操舵支援制御を実行する制御装置を備えている。前記制御装置は、前記自車両が走行している車線を規定する境界である走路境界を認識することができている場合、前記操舵支援制御を実行し、前記走路境界を認識することができなくなった場合、前記操舵支援制御を停止する、ように構成されている。前記操舵支援制御は、前記走路境界に対する前記自車両の位置に基づいて限度舵角を設定し、該限度舵角よりも前記自車両の実舵角が大きい場合、前記限度舵角と前記実舵角との差に基づいて設定される値の前記操舵支援トルクを前記操舵操作に付加する制御である。更に、前記制御装置は、前記走路境界を認識することができなくなった時点で前記操舵操作に付加されている前記操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行するように構成されている。そして、前記急減抑制制御は、前記実付加トルクを、前記走路境界を認識することができなくなった時点の前記実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、前記走路境界を認識することができなくなった時点で前記操舵支援制御により設定されている前記限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である。
【0006】
本発明に係る車両運転支援装置によれば、操舵支援制御が停止されたとき、急減抑制制御が実行される。こうした急減抑制制御が実行されない場合、操舵操作に付加される操舵支援トルクが突然ゼロとなるので、自車両の操作者に違和感を与えてしまう可能性がある。しかしながら、本発明に係る車両運転支援装置によれば、急操舵支援制御が停止されたとき、減抑制制御が実行されて、操舵操作に付加される操舵支援トルクが徐々に小さくされる。このため、操舵支援制御が停止されたときに、自車両の操作者に違和感を与えてしまうことを抑制することができる。
【0007】
尚、本発明に係る車両運転支援装置において、前記制御装置は、前記走路境界を認識することができなくなった後、前記走路境界を認識することができるようになった時点で前記操舵支援制御により設定される前記操舵支援トルクがその時点における前記実付加トルクよりも大きい場合、急増抑制制御を実行してから前記操舵支援制御を実行するように構成され得る。そして、この場合において、前記急増抑制制御は、前記実付加トルクを単位時間当たり所定の急増抑制値ずつ大きくする制御、又は、前記走路境界を認識することができるようになった時点の前記実舵角から単位時間当たり所定の急増抑制角度ずつ小さくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である。
【0008】
走路境界が認識することができなくなった後、走路境界が認識することができるようになったとき、急増抑制制御が実行されてから、操舵支援制御が実行される。こうした急増抑制制御が実行されない場合、比較的大きな操舵支援トルクが操舵操作に突然付加されることになるので、自車両の操作者に違和感を与えてしまう可能性がある。しかしながら、本発明に係る車両運転支援装置によれば、操舵支援制御が開始される前に、急増抑制制御が実行されて、操舵操作に付加される操舵支援トルクが徐々に大きくされる。このため、操舵支援制御が開始されるときに、自車両の操作者に違和感を与えてしまうことを抑制することができる。
【0009】
又、本発明に係る車両運転支援方法は、自車両の操作者が行う操舵操作を支援するために前記操舵操作に抗する操舵支援トルクを前記操舵操作に付加する操舵支援制御を実行する方法である。本発明に係る車両運転支援方法は、前記自車両が走行している車線を規定する境界である走路境界を認識することができている場合、前記操舵支援制御を実行する工程と、前記走路境界を認識することができなくなった場合、前記操舵支援制御を停止する工程と、を有している。前記操舵支援制御は、前記走路境界に対する前記自車両の位置に基づいて限度舵角を設定し、該限度舵角よりも前記自車両の実舵角が大きい場合、前記限度舵角と前記実舵角との差に基づいて設定される値の前記操舵支援トルクを前記操舵操作に付加する制御である。又、本発明に係る車両運転支援方法は、前記走路境界を認識することができなくなった時点で前記操舵操作に付加されている前記操舵支援トルクである実付加トルクがゼロよりも大きい場合、急減抑制制御を実行する工程を更に有している。そして、前記急減抑制制御は、前記実付加トルクを、前記走路境界を認識することができなくなった時点の前記実付加トルクから単位時間当たり所定の急減抑制値ずつ小さくする制御、又は、前記走路境界を認識することができなくなった時点で前記操舵支援制御により設定されている前記限度舵角から単位時間当たり所定の急減抑制角度ずつ大きくされる角度を前記限度舵角として用いて設定される前記操舵支援トルクを前記操舵操作に付加する制御である。
【0010】
本発明に係る車両運転支援方法によれば、操舵支援制御が停止されたときに、運転者に違和感を与えてしまうことを抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
ロータ
4日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
回転子
2日前
トヨタ自動車株式会社
回転子
17日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
サーバ
10日前
トヨタ自動車株式会社
電解液
2日前
トヨタ自動車株式会社
加熱装置
16日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
表示装置
18日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
育苗装置
3日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
給電装置
16日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
電動車両
16日前
トヨタ自動車株式会社
電動車両
16日前
トヨタ自動車株式会社
蓄電セル
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ