TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025143928
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024043446
出願日
2024-03-19
発明の名称
運転支援システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
50/08 20200101AFI20250925BHJP(車両一般)
要約
【課題】ドライバがハンドルを保持しない状態での走行制御について必要以上に制限されることを抑制できる運転支援システムを提供する。
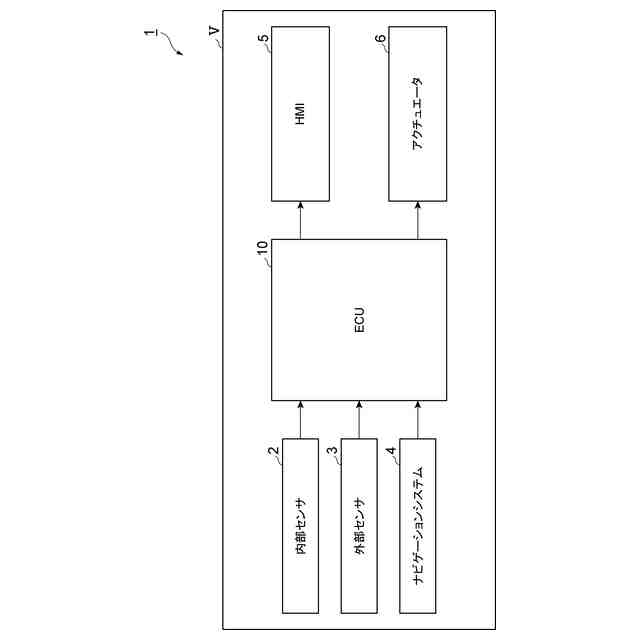
【解決手段】運転支援システム1は、ハンズオフでの車両Vの走行制御を継続可能なシステムである。運転支援システム1は、要注意エリアに車両Vが到達するまでの到達時間を算出し、設定されたハンズオフ許可時間よりも当該到達時間が大きい場合に、ハンズオフにおける走行制御を許可する。
【選択図】図2
特許請求の範囲
【請求項1】
車両のドライバがハンドルを保持しない状態において前記車両の走行制御を継続可能な運転支援システムであって、
要注意エリアに車両が到達するまでの到達時間を算出し、
設定されたハンズオフ許可時間よりも前記到達時間が大きい場合に、前記ドライバがハンドルを保持しない状態における前記走行制御を許可する、運転支援システム。
続きを表示(約 350 文字)
【請求項2】
前記要注意エリアは、交差点、工事区間、事故現場を含む区間、及び、高頻度事故発生区間の少なくとも何れかである、請求項1に記載の運転支援システム。
【請求項3】
前記ハンズオフ許可時間は、前記要注意エリアの種別に応じて定められている、請求項1に記載の運転支援システム。
【請求項4】
前記到達時間が前記ハンズオフ許可時間以下の場合に、前記ドライバがハンドルを保持しない状態における前記走行制御を不許可とする、請求項1に記載の運転支援システム。
【請求項5】
前記ドライバがハンドルを保持しない状態における前記走行制御を不許可とした場合に、ハンドルを保持した状態で運転することをドライバに対して要求する、請求項4に記載の運転支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明の一側面は、運転支援システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
運転支援システムに関する技術として、例えば特許文献1には、自動運転可能エリア内にて自車両の周囲の渋滞が把握されると、自車両においてドライバによる周辺監視義務及びステアリングの把持義務がない自律走行制御による自動走行が可能になる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-176869号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
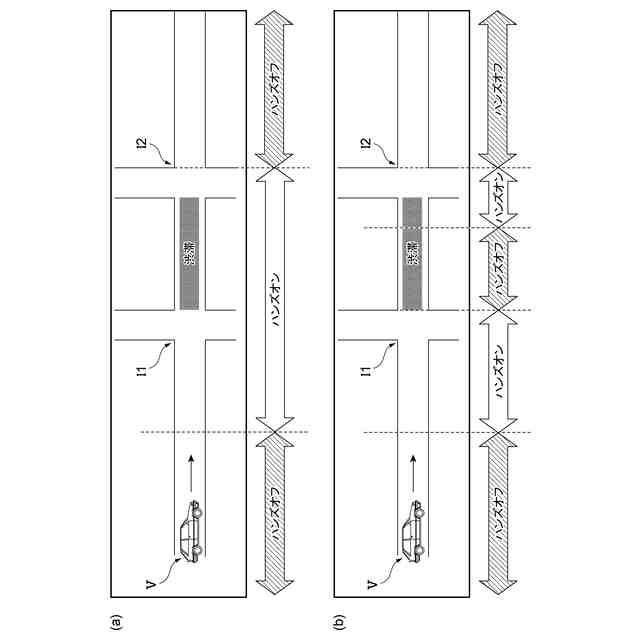
ところで、車両のドライバがハンドルを保持しない状態(以下、「ハンズオフ」ともいう)において車線維持制御等の走行制御を継続可能な運転支援システムでは、車両が交差点等の要注意エリアに対して一定距離内に位置するときには、例えば安全性を確保するために、ハンズオフでの走行制御を許可しない場合が考えられる。このような運転支援システムでは、車両が要注意エリアに近づいた際、例えば交通流が遅い状況では、まだ十分な時間ハンズオフでの走行制御が継続可能にもかかわらず、当該走行制御が制限されることがある。
【0005】
そこで、本発明の一側面は、ドライバがハンドルを保持しない状態での走行制御について必要以上に制限されることを抑制できる運転支援システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明の一側面に係る運転支援システムは、車両のドライバがハンドルを保持しない状態において車両の走行制御を継続可能な運転支援システムであって、要注意エリアに車両が到達するまでの到達時間を算出し、設定されたハンズオフ許可時間よりも到達時間が大きい場合に、ドライバがハンドルを保持しない状態における走行制御を許可する。
【0007】
この運転支援システムでは、要注意エリアに車両が到達するまでの到達時間をもとに、ハンズオフでの走行制御を許可することができる。よって、例えば交通流が遅い状況において車両が要注意エリアに近づく際、ハンズオフでの走行制御が必要以上に制限されることを抑制することが可能となる。
【0008】
(2)上記(1)に記載された運転支援システムでは、要注意エリアは、交差点、工事区間、事故現場を含む区間、及び、高頻度事故発生区間の少なくとも何れかであってもよい。この場合、要注意エリアとして、交差点、工事区間、事故現場を含む区間、及び、高頻度事故発生区間の少なくとも何れかを考慮できる。
【0009】
(3)上記(1)又は(2)に記載された運転支援システムでは、ハンズオフ許可時間は、要注意エリアの種別に応じて定められていてもよい。この場合、要注意エリアの種別に応じて、ハンズオフでの走行制御が必要以上に制限されることを抑制するという上記効果を発揮できる。
【0010】
(4)上記(1)~(3)の何れかに記載された運転支援システムは、到達時間がハンズオフ許可時間以下の場合に、ドライバがハンドルを保持しない状態における走行制御を不許可としてもよい。この場合、到達時間がハンズオフ許可時間以下であって例えば要注意エリアへ間もなく到達する場合に、ハンズオフでの走行制御が行われないように当該走行制御を制限できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
回転子
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電解液
2日前
トヨタ自動車株式会社
ロータ
4日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
電源装置
2日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
塗布装置
4日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
検査装置
6日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
育苗装置
3日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
切断装置
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
二次電池
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
電池パック
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ