TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025146652
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024221881
出願日
2024-12-18
発明の名称
障害物検出システム、移動体、プログラムおよび障害物検出方法
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/622 20240101AFI20250926BHJP(制御;調整)
要約
【課題】移動体が停止している際に、センサの観測範囲外や移動体の筐体によるオクルージョンなどの死角に対して障害物検出を行う。
【解決手段】障害物を検出する障害物検出システムであって、移動体が走行する走行路面までの距離と高さ方向を検出するための三次元方向の測距が可能な三次元測距センサと、前記移動体が停止している際に、前記走行路面上の障害物を検出する障害物検出部と、を備え、前記障害物検出部は、前記移動体が停止するまでに保持されている前記走行路面からの高さ情報であって、前記移動体が停止するまでの所定の期間に移動した前記移動体の移動量に基づいた前記高さ情報で補完した高さ履歴データを生成する高さ履歴データ生成手段を備える。
【選択図】図16
特許請求の範囲
【請求項1】
障害物を検出する障害物検出システムであって、
移動体が走行する走行路面までの距離と高さ方向を検出するための三次元方向の測距が可能な三次元測距センサと、
前記移動体が停止している際に、前記走行路面上の障害物を検出する障害物検出部と、
を備え、
前記障害物検出部は、
前記移動体が停止するまでに保持されている前記走行路面からの高さ情報であって、前記移動体が停止するまでの所定の期間に移動した前記移動体の移動量に基づいた前記高さ情報で補完した高さ履歴データを生成する高さ履歴データ生成手段を備える、
ことを特徴とする障害物検出システム。
続きを表示(約 1,100 文字)
【請求項2】
前記高さ履歴データ生成手段は、前記高さ履歴データに対して、認識した移動体の矩形領域を照らし合わせ、当該移動体の矩形領域から高さ情報を除去する、
ことを特徴とする請求項1に記載の障害物検出システム。
【請求項3】
前記高さ履歴データ生成手段は、外部機器からの指示により、前記高さ履歴データに保持された高さ情報を消去する、
ことを特徴とする請求項1に記載の障害物検出システム。
【請求項4】
前記三次元測距センサによる測定結果は、前記移動体を基準とした三次元の走行路面データであり、
前記障害物検出部は、前記高さ情報として前記走行路面データに基づく前記走行路面からの最大高さを保持した高さマップデータを生成して前記高さ履歴データ生成手段に供する、
ことを特徴とする請求項1ないし3のいずれか一項に記載の障害物検出システム。
【請求項5】
前記障害物検出部は、前記走行路面データに、平面検出により振動補正を施した上で時間により重ね合わせて得られた、補正後の前記走行路面データに基づき、前記高さマップデータを生成する、
ことを特徴とする請求項4に記載の障害物検出システム。
【請求項6】
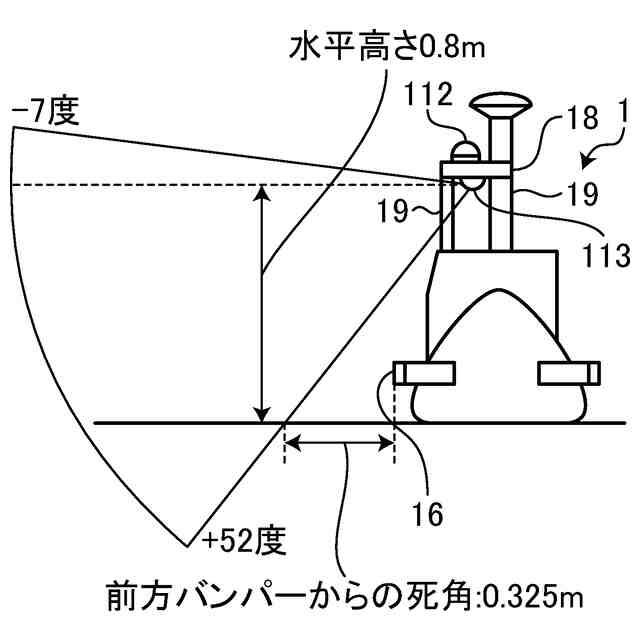
前記三次元測距センサは、前記移動体の走行方向の先端部手前までの前記走行路面を検出できる高さかつ傾斜角度に設置されている、
ことを特徴とする請求項4に記載の障害物検出システム。
【請求項7】
前記障害物検出部は、
高低差となだらかさの特徴に基づいて前記走行路面に高さ障害物があるかを判定し、
近傍の高さの差に基づいて前記走行路面に溝障害物があるかを判定する、
ことを特徴とする請求項4に記載の障害物検出システム。
【請求項8】
前記障害物検出部は、前記高さマップデータの生成結果を得るための、前記振動補正の結果に基づくボクセルグリッドを生成する、
ことを特徴とする請求項5に記載の障害物検出システム。
【請求項9】
前記障害物検出部は、前記振動補正の結果の点群分布に基づいてノイズ除去を行う、
ことを特徴とする請求項5に記載の障害物検出システム。
【請求項10】
前記移動体の駆動部材は、所定の接地長を有する履帯式走行体であり、
前記障害物検出部は、前記駆動部材に合わせた判定のパラメータを有する、
ことを特徴とする請求項4に記載の障害物検出システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、障害物検出システム、移動体、プログラムおよび障害物検出方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、屋外にて動作させる走行装置(移動体)には、自律走行を行うために障害物を検出して停止や回避を行う、安全技術が必須である。この安全技術には、RGBDカメラやステレオカメラ、レーダー、超音波センサなどの様々なセンサが用いられている。近年、安全技術に用いられるセンサとして、レーザ光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術であるLiDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)、特に二次元平面の障害物が検出できる2D-LiDARが用いられることが多い。
【0003】
特許文献1には、移動体に設置された距離測定装置による一次元のレーザ走査をK回行い、a回前(K-a回)の走査からK回目までのレーザ走査の全てについて、連続して凹形状の障害物として検出する技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術によれば、移動体が停止している際に、センサの観測範囲外や移動体の筐体によるオクルージョンなどの死角に対して障害物検出を行うことができないという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、移動体が停止している際に、センサの観測範囲外や移動体の筐体によるオクルージョンなどの死角に対して障害物検出を行うことができることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、障害物を検出する障害物検出システムであって、移動体が走行する走行路面までの距離と高さ方向を検出するための三次元方向の測距が可能な三次元測距センサと、前記移動体が停止している際に、前記走行路面上の障害物を検出する障害物検出部と、を備え、前記障害物検出部は、前記移動体が停止するまでに保持されている前記走行路面からの高さ情報であって、前記移動体が停止するまでの所定の期間に移動した前記移動体の移動量に基づいた前記高さ情報で補完した高さ履歴データを生成する高さ履歴データ生成手段を備える、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、移動体が停止している際に、センサの観測範囲外や移動体の筐体によるオクルージョンなどの死角に対して障害物検出を行うことができる、という効果を奏する。
【図面の簡単な説明】
【0008】
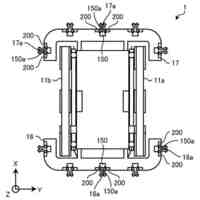
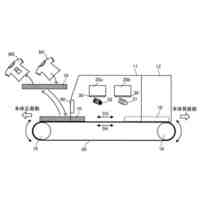
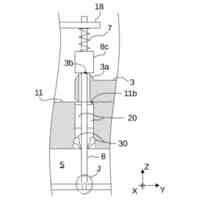
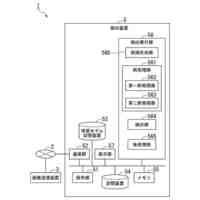
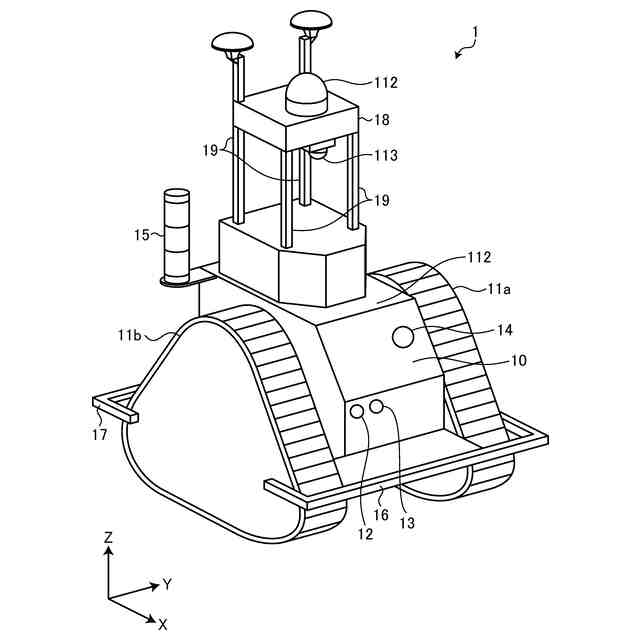
図1は、第1の実施の形態にかかる障害物検出システムとしての走行装置の構成の一例を示す外観斜視図である。
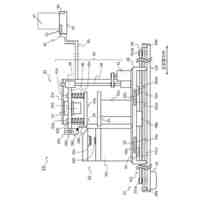
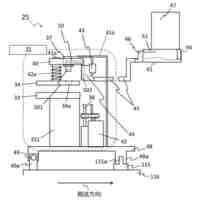
図2は、走行装置の構成の一例を示す側面図である。
図3は、走行装置を上方から見た様子示す平面図である。
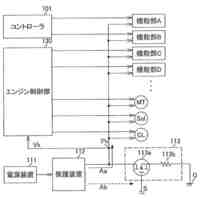
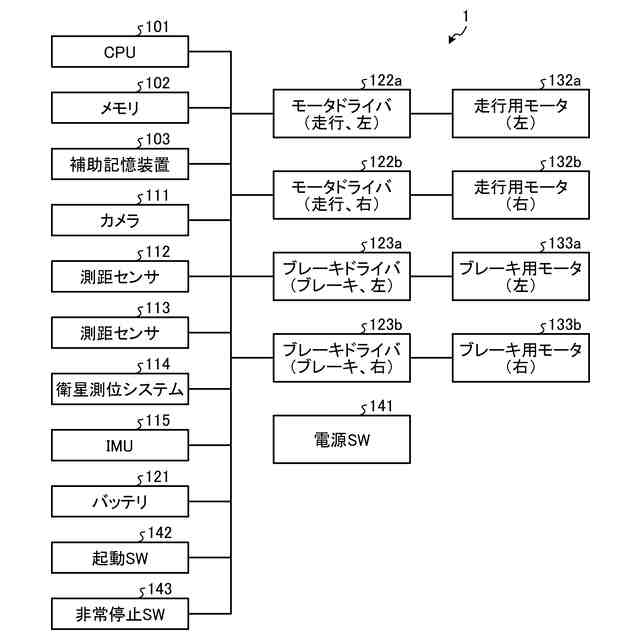
図4は、走行装置のハードウェア構成の一例を示すブロック図である。
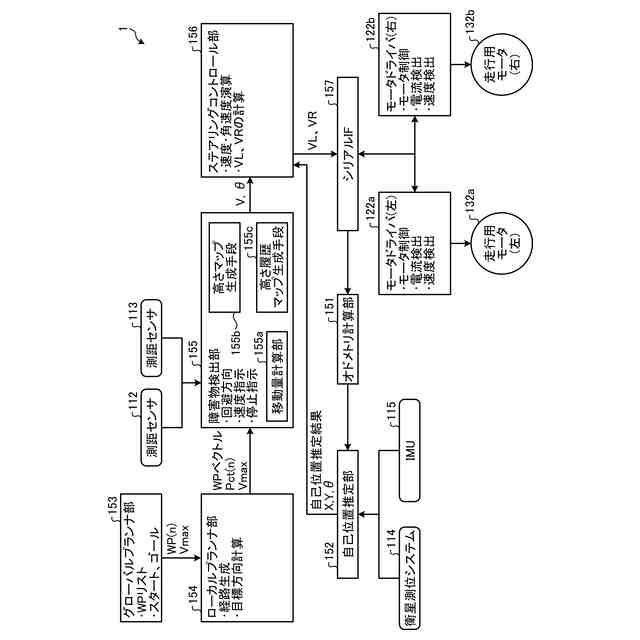
図5は、走行装置の自律走行にかかる機能構成を示すブロック図である。
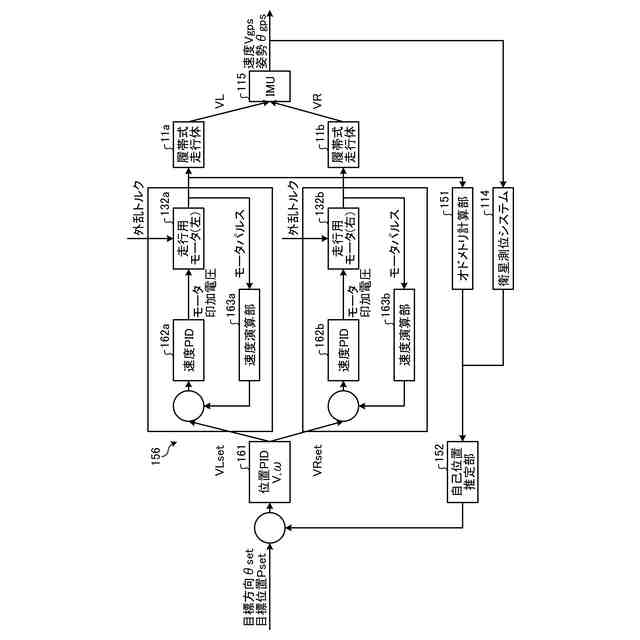
図6は、ステアリングコントロール部の速度制御にかかる機能構成を示すブロック図である。
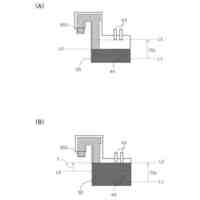
図7は、縁石の検出処理の概要について説明する図である。
図8は、溝の検出処理の概要について説明する図である。
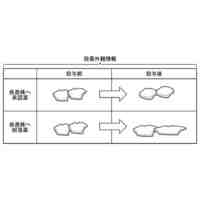
図9は、路面障害物の検出処理結果の例を示す図である。
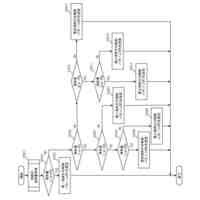
図10は、走行装置における路面障害物の検出処理の手順の一例を示すフローチャートである。
図11は、点群データ保存処理の手順の一例を示すフローチャートである。
図12は、高さマップ生成処理の手順の一例を示すフローチャートである。
図13は、ノイズ除去処理の概要について示す図である。
図14は、ノイズ除去処理結果の例について説明する図である。
図15は、高さマップの一例を示す図である。
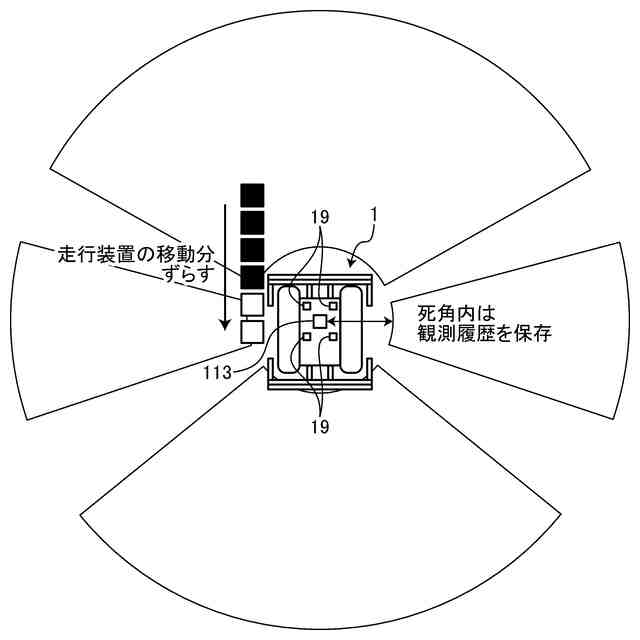
図16は、障害物検出の死角対応処理の概要について説明する図である。
図17は、アルゴリズムとして常に実行する処理の手順の一例を示すフローチャートである。
図18は、高さ履歴マップ生成処理の手順の一例を示すフローチャートである。
図19は、移動体領域除去処理の手順の一例を示すフローチャートである。
図20は、クライアントサーバ処理における高さ履歴マップクリアサービス処理の手順の一例を示すフローチャートである。
図21は、高さ履歴マップクリアサービス処理を呼び出す一例を示すシーケンス図である。
図22は、高さ履歴マップクリアサービス処理を呼び出す別の一例を示すシーケンス図である。
図23は、高さ障害物マップ生成処理の手順の一例を示すフローチャートである。
図24は、微分障害物マップ生成処理の手順の一例を示すフローチャートである。
図25は、溝障害物ラベリングマップ生成処理の手順の一例を示すフローチャートである。
図26は、障害物マップ生成処理の手順の一例を示すフローチャートである。
図27は、障害物マップ追加処理の概要について説明する図である。
図28は、障害物マップ追加処理適用結果の例について説明する図である。
図29は、第2の実施の形態にかかる障害物検出システムとしての自動車を示す図である。
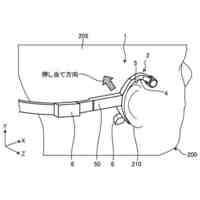
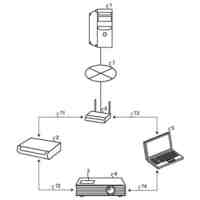
図30は、第3の実施の形態にかかる障害物検出システムの構成を示す図である。
【発明を実施するための形態】
【0009】
(第1の実施の形態)
以下に添付図面を参照して、障害物検出システム、移動体、プログラムおよび障害物検出方法の実施の形態を詳細に説明する。
【0010】
(走行装置の構成例)
図1は、第1の実施の形態にかかる障害物検出システムとしての走行装置1の構成の一例を示す外観斜視図である。走行装置1は、工場などの設備点検で使用されることを想定した不整地を移動する移動体である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
移動体
9日前
株式会社リコー
感熱記録媒体
15日前
株式会社リコー
画像形成装置
14日前
株式会社リコー
画像形成システム
14日前
株式会社リコー
生体情報測定装置
15日前
株式会社リコー
液体を吐出する装置
15日前
株式会社リコー
印刷装置および印刷システム
14日前
株式会社リコー
液体吐出装置及び液体吐出方法
14日前
株式会社リコー
システム、方法およびプログラム
14日前
株式会社リコー
ベルト装置、及び、画像形成装置
14日前
株式会社リコー
媒体処理装置及び画像形成システム
14日前
株式会社リコー
媒体処理装置及び画像形成システム
14日前
株式会社リコー
媒体処理装置及び画像形成システム
15日前
株式会社リコー
媒体処理装置及び画像形成システム
14日前
株式会社リコー
液体吐出ヘッドおよび液体吐出装置
15日前
株式会社リコー
媒体処理装置及び画像形成システム
14日前
株式会社リコー
シート給紙装置、および画像形成装置
14日前
株式会社リコー
処理剤液塗布装置および画像形成装置
14日前
株式会社リコー
原稿処理装置、及び原稿処理システム
15日前
株式会社リコー
液体吐出ヘッド及び液体を吐出する装置
15日前
株式会社リコー
ノード、データ共有方法、及びプログラム
7日前
株式会社リコー
画像形成装置及び転写残トナーの回収方法
15日前
株式会社リコー
画像形成装置及び転写残トナーの回収方法
15日前
株式会社リコー
投受光装置、測距システムおよびプログラム
15日前
株式会社リコー
画像形成装置、情報処理方法およびプログラム
14日前
株式会社リコー
面発光レーザ、レーザ装置、検出装置及び移動体
14日前
株式会社リコー
用紙処理装置、用紙処理方法、およびプログラム
14日前
株式会社リコー
表示装置、表示方法、プログラム、表示システム
8日前
株式会社リコー
画像形成装置、画像形成方法、およびプログラム
14日前
株式会社リコー
画像処理装置、画像処理方法、およびプログラム
14日前
株式会社リコー
対話装置、対話システム、対話方法及びプログラム
7日前
株式会社リコー
液体吐出ヘッド、ヘッドモジュール、液体吐出装置
14日前
株式会社リコー
検出システム、検出装置、検出方法及びプログラム
15日前
株式会社リコー
判定装置、判定方法及びコンピュータープログラム
15日前
株式会社リコー
液滴吐出ヘッド、ヘッドユニット及び液滴吐出装置
14日前
株式会社リコー
電気機器、画像形成装置、制御方法、及びプログラム
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ