TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025160942
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024063687
出願日
2024-04-11
発明の名称
情報処理装置、情報処理方法、プログラム、および記憶媒体
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/606 20240101AFI20251017BHJP(制御;調整)
要約
【課題】 三次元地図の作成に影響を及ぼし得る物体が存在する場合でも、三次元地図の品質の低下を軽減することが可能な情報処理装置を提供する。
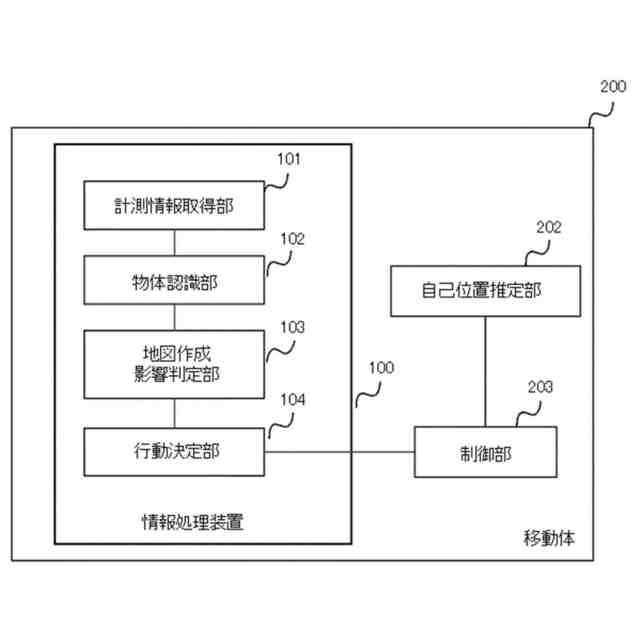
【解決手段】 情報処理装置(100)は、センサ(304)から計測情報を取得する情報取得手段(101)と、計測情報に基づいて物体を認識する物体認識手段(102)と、三次元地図の作成に際して物体の影響があるか否かを判定する影響判定手段(103)と、影響判定手段の判定結果に基づいて移動体(200)の行動を決定する行動決定手段(104)とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
センサから計測情報を取得する情報取得手段と、
前記計測情報に基づいて物体を認識する物体認識手段と、
三次元地図の作成に際して前記物体の影響があるか否かを判定する影響判定手段と、
前記影響判定手段の判定結果に基づいて移動体の行動を決定する行動決定手段と、を有することを特徴とする情報処理装置。
続きを表示(約 980 文字)
【請求項2】
前記影響判定手段は、前記センサの計測領域における前記物体が占める領域を検出し、該領域に基づいて前記物体の影響があるか否かを判定することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記計測情報は、画像であり、
前記影響判定手段は、
前記画像において前記物体が占める領域の大きさを算出し、
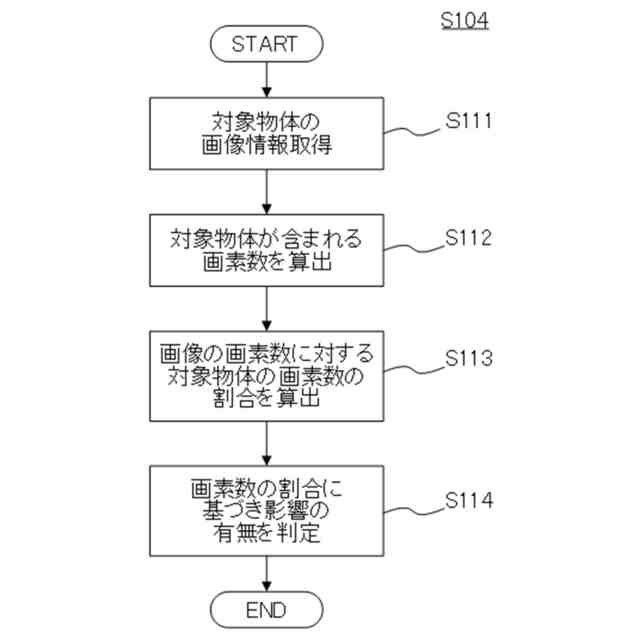
前記領域の前記大きさに基づいて、前記物体の影響があるか否かを判定することを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記計測情報は、画像であり、
前記影響判定手段は、
前記画像において前記物体が占める領域の変化量を算出し、
前記領域の前記変化量に基づいて、前記物体の影響があるか否かを判定することを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記計測情報は、深度画像であり、
前記影響判定手段は、
前記深度画像に基づいて、前記物体により遮蔽される空間領域の大きさを算出し、
前記空間領域の前記大きさに基づいて、前記物体の影響があるか否かを判定することを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記計測情報は、点群情報であることを特徴とする請求項1に記載の情報処理装置。
【請求項7】
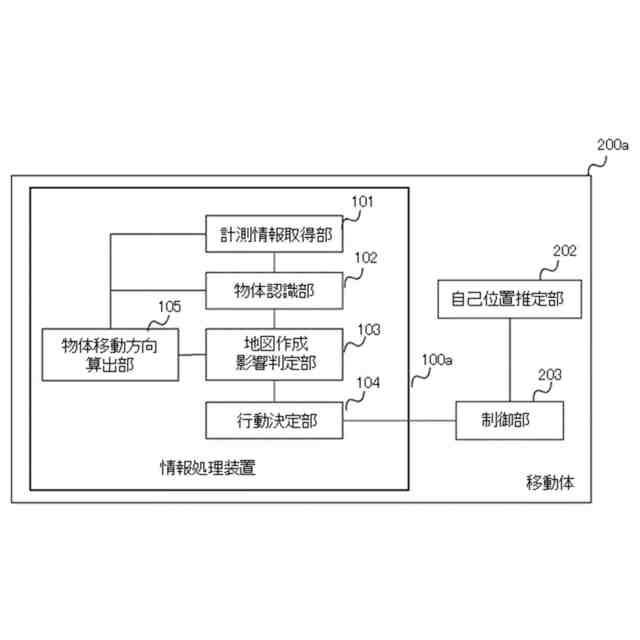
前記物体の移動方向を算出する算出手段を更に有し、
前記影響判定手段は、前記移動方向に基づいて、前記物体の影響があるか否かを判定することを特徴とする請求項1に記載の情報処理装置。
【請求項8】
前記物体は、移動可能な物体であることを特徴とする請求項1乃至7のいずれか一項に記載の情報処理装置。
【請求項9】
前記行動決定手段は、前記影響判定手段により前記影響があると判定された場合、前記移動体の走行を停止することを特徴とする請求項1乃至7のいずれか一項に記載の情報処理装置。
【請求項10】
前記行動決定手段は、前記影響判定手段により前記影響が無くなったと判定された場合、前記移動体の走行を再開することを特徴とする請求項1乃至7のいずれか一項に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、プログラム、および記憶媒体に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、カメラ(撮像装置)またはLIGHT DETECTION AND RANGING(LiDAR)等のセンサで計測した距離情報または画像情報等に基づいて、現実空間の三次元形状を取得する技術が知られている。特許文献1には、画像データから三次元モデル(三次元地図)の生成に不要な物体を検出し、その物体に対応する障害物領域を検出し、その障害物領域に対応する3D LiDARの点群情報を削除した上で三次元モデルを生成する方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-192170号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された方法では、物体に対応する3D LiDARの点群情報を削除するため、三次元地図の品質が低下する。
【0005】
そこで本発明は、三次元地図の作成に影響を及ぼし得る物体が存在する場合でも、三次元地図の品質の低下を軽減することが可能な情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一側面としての情報処理装置は、センサから計測情報を取得する情報取得手段と、前記計測情報に基づいて物体を認識する物体認識手段と、三次元地図の作成に際して前記物体の影響があるか否かを判定する影響判定手段と、前記影響判定手段の判定結果に基づいて移動体の行動を決定する行動決定手段とを有する。
【0007】
本発明の他の目的及び特徴は、以下の実施例において説明される。
【発明の効果】
【0008】
本発明によれば、三次元地図の作成に影響を及ぼし得る物体が存在する場合でも、三次元地図の品質の低下を軽減することが可能な情報処理装置を提供することができる。
【図面の簡単な説明】
【0009】
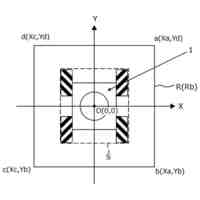
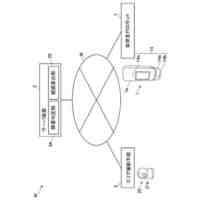
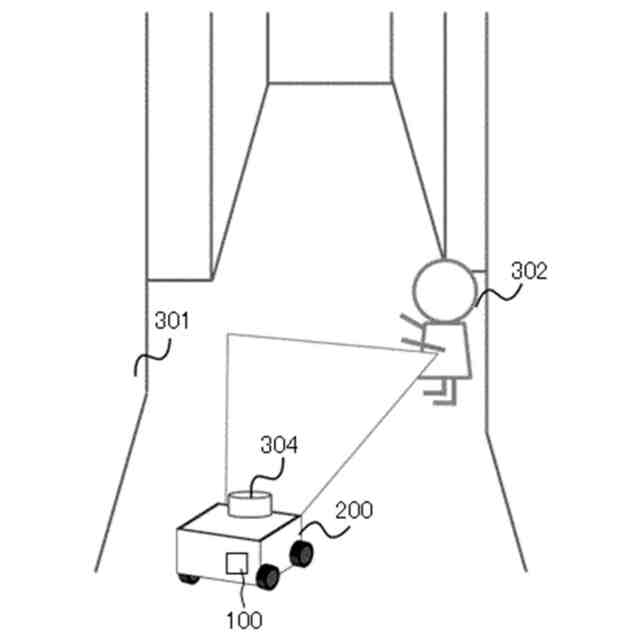
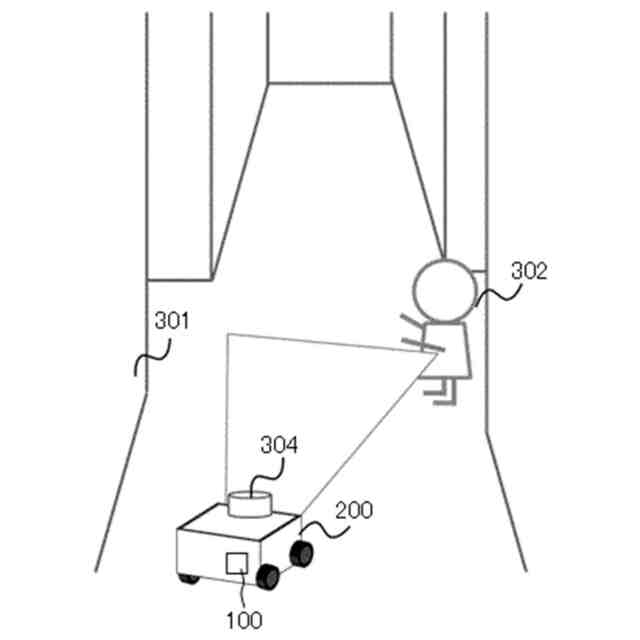
実施例1における適用シーンを示す図である。
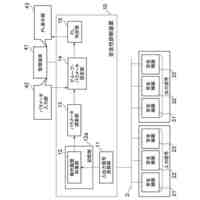
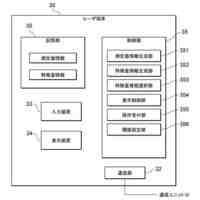
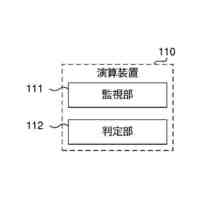
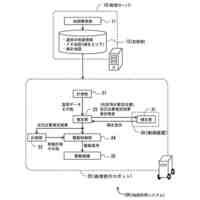
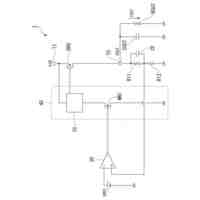
実施例1における情報処理装置の構成図である。
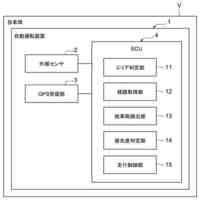
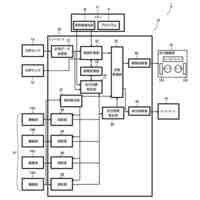
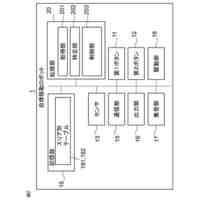
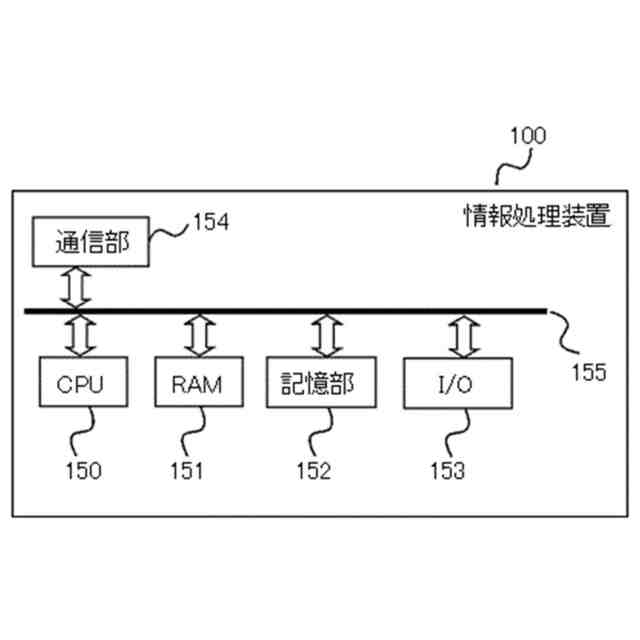
実施例1における情報処理装置および移動体のブロック図である。
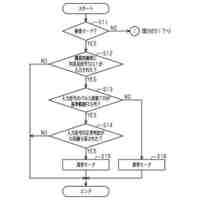
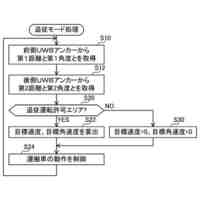
実施例1における情報処理装置の処理を示すフローチャートである。
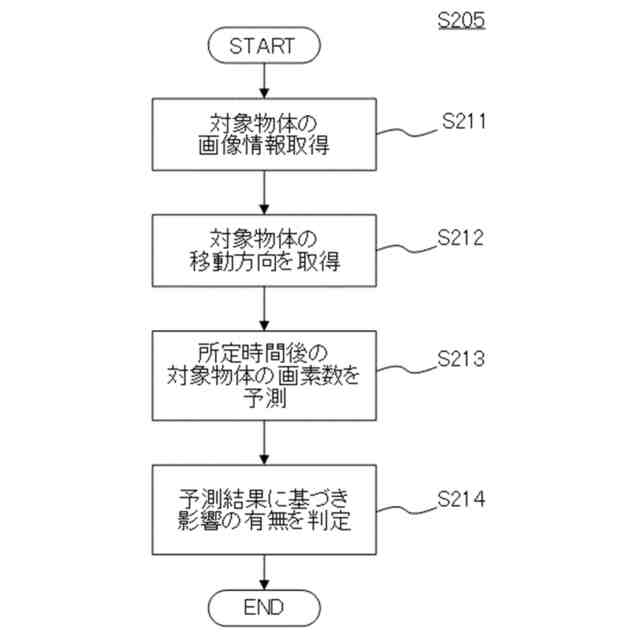
実施例1における地図作成影響判定の処理を示すフローチャートである。
実施例2における情報処理装置および移動体のブロック図である。
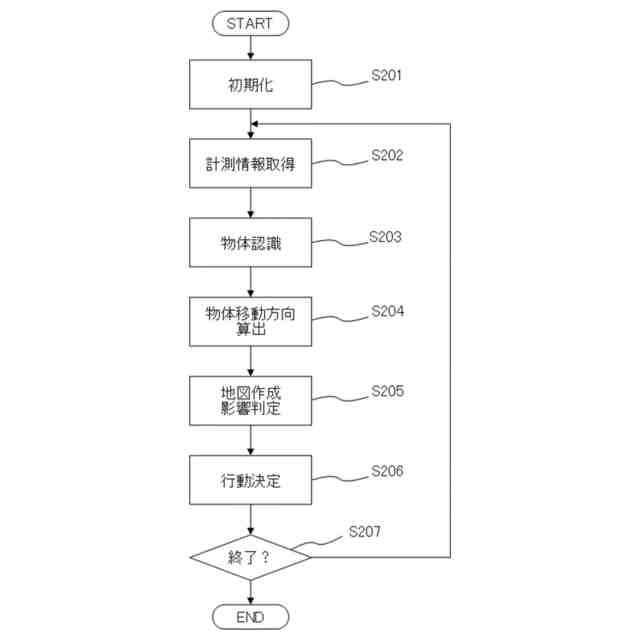
実施例2における情報処理装置の処理を示すフローチャートである。
実施例2における地図作成影響判定の処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を参照しながら詳細に説明する。なお、以下の各実施例は、本発明を限定するものではなく、また以下の各実施例で説明する特徴の組み合わせの全てが本発明に必須のものとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
21日前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
19日前
豊田合成株式会社
機器制御装置
26日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
物品搬送設備
今日
カヤバ株式会社
減圧弁
28日前
エイブリック株式会社
電流補償回路及び半導体装置
15日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
制御装置
1か月前
村田機械株式会社
搬送車システム
20日前
株式会社アマダ
工作機械制御装置
20日前
株式会社TMEIC
安全性診断装置
1か月前
株式会社CAOS
移動体の制御システム
1か月前
日野自動車株式会社
自動運転装置
20日前
株式会社明電舎
負荷制御装置
1日前
株式会社明電舎
負荷制御装置
1日前
ローム株式会社
電源回路用の電子負荷装置
1か月前
株式会社カーメイト
アクセルペダルカバー
26日前
オムロン株式会社
システム及び方法
1日前
シンフォニアテクノロジー株式会社
自動走行車両
1か月前
オムロン株式会社
システム及び方法
1日前
株式会社明電舎
負荷制御装置
1日前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社東海ヒット
複段圧力差生成システム
28日前
株式会社マキタ
運搬車
1か月前
株式会社マキタ
運搬車
1か月前
ローム株式会社
電源装置
19日前
セコム株式会社
自律移動ロボット
19日前
IDEC株式会社
教示装置
26日前
株式会社TMEIC
通信伝文データ照合装置
20日前
KDDI株式会社
制御装置、方法及びプログラム
20日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
15日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
21日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ