TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080911
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194293
出願日
2023-11-15
発明の名称
テレスコピック型ロボットアーム及びその駆動方法
出願人
国立大学法人東京科学大学
代理人
個人
主分類
B25J
18/02 20060101AFI20250520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】曲げ量が大きい軽量化したテレスコピック型ロボットアーム及びその駆動方法を提供する。
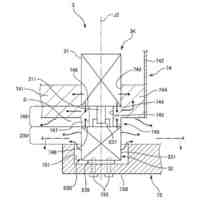
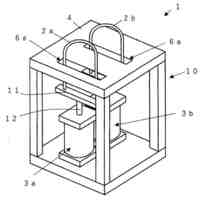
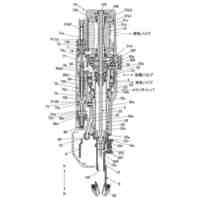
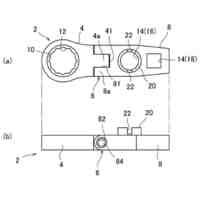
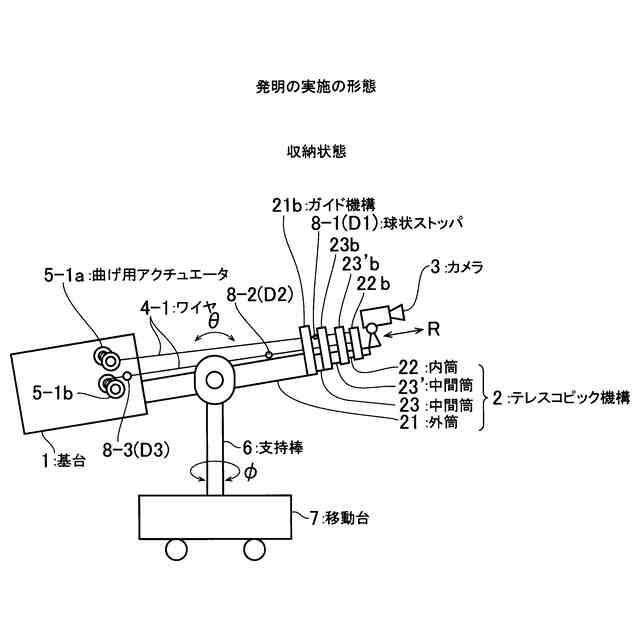
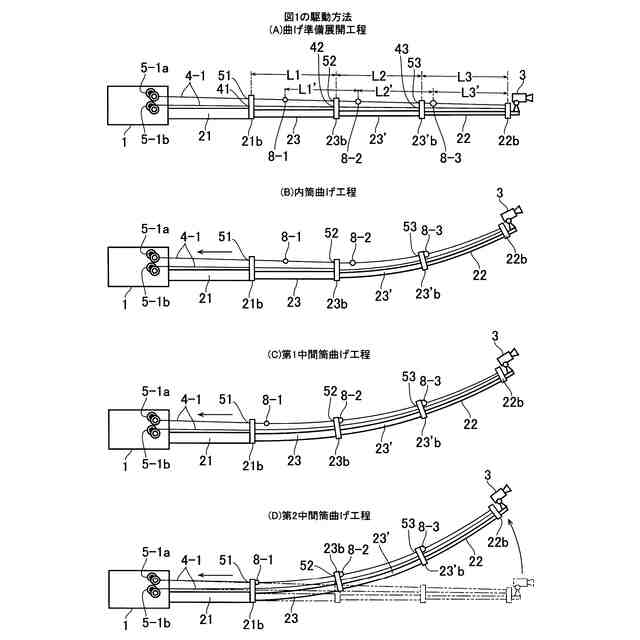
【解決手段】テレスコピック機構2は、基台1に固定された外筒21、カメラ3が設けられた内筒22、外筒21と内筒22との間の中間筒23、23’を有する。外筒21、中間筒23、23’及び内筒22の先端に設けられたガイド機構21b、23b、23’b、22bにワイヤ(ロープ)4-1を通過させ、ワイヤ4-1の一端は基台1内に設けられた曲げ用アクチュエータ5-1aに巻回され、ワイヤ4-1の他端は基台1内に設けられた曲げ用アクチュエータ5-1bに巻回される。ワイヤ4-1上には、径が異なる球状ストッパ8-1、8-2、8-3が形成されている。球状ストッパ8-1、8-2、8-3の径D1、D2、D3は曲げ用アクチュエータ5-1aから曲げ用アクチュエータ5-1bに向って順次大きくなっている。
【選択図】 図1
特許請求の範囲
【請求項1】
基台と、
前記基台に固定された外筒と、
前記外筒に内挿された内筒と、
前記外筒と前記内筒との間に内挿された少なくとも1つの中間筒と、
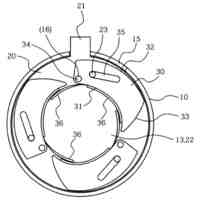
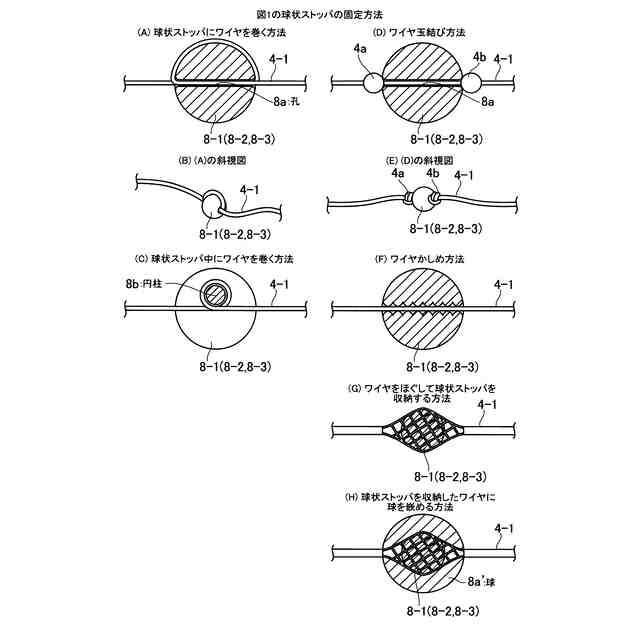
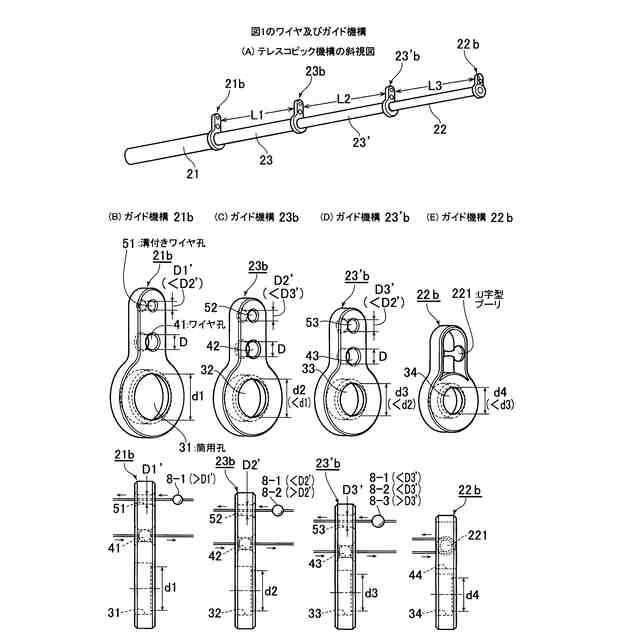
前記外筒の先端及び前記中間筒の先端に設けられ、第1、第2の孔を有する第1のガイド機構と、
前記内筒の先端に設けられた第2のガイド機構と、
前記基台内に設けられ、前記外筒に対して前記中間筒及び前記内筒を連動して展開するための伸縮用アクチュエータと、
前記基台内に設けられ、前記外筒に対して前記中間筒及び前記内筒を曲げるための第1、第2の曲げ用アクチュエータと、
前記第1の曲げ用アクチュエータから前記外筒の第1のガイド機構の第1の孔及び前記中間筒の第1のガイド機構の第1の孔を通過し、前記内筒の第2のガイド機構で折り返され、前記中間筒の第1のガイド機構の第2の孔及び前記外筒の第1のガイド機構の第2の孔を通過し、前記第2の曲げ用アクチュエータに巻回され、複数のストッパが固定されたワイヤと
を具備し、
前記複数のストッパの径は前記第1の曲げ用アクチュエータから前記第2の曲げ用アクチュエータに向って順次大きくなり、
前記外筒の第1のガイド機構の第1の孔の径及び前記中間筒の第1のガイド機構の第1の孔の径は前記ストッパの最大径より小さく、
前記外筒の第1のガイド機構の第2の孔の径及び前記中間筒の第1のガイド機構の第2の孔の径は前記ストッパの最大径より大きく、
前記外筒の第1のガイド機構の第1の孔は前記ストッパを通過させず、
前記中間筒の第1のガイド機構の第1の孔は前記複数のストッパの少なくとも1つのストッパを通過させ、前記少なくとも1つのストッパの前記第2の曲げ用アクチュエータ側の前記複数のストッパの他の1つのストッパを通過させず、
前記中間筒の長さは該中間筒の第1のガイド機構の第1の孔を通過したストッパと該ストッパに隣接して該第1の孔を通過できないストッパとの間の距離より大きいテレスコピック型ロボットアーム。
続きを表示(約 1,400 文字)
【請求項2】
前記内筒の先端に設けられた第2のガイド機構はU字型プーリを具備する請求項1に記載のテレスコピック型ロボットアーム。
【請求項3】
前記第1の孔は前記ストッパを受けるための溝付き孔である請求項1に記載のテレスコピック型ロボットアーム。
【請求項4】
基台と、
前記基台に固定された外筒と、
前記外筒に内挿された内筒と、
前記外筒と前記内筒との間に内挿された少なくとも1つの中間筒と、
前記外筒の先端及び前記中間筒の先端に設けられ、孔を有する第1のガイド機構と、
前記内筒の先端に設けられた第2のガイド機構と、
前記基台内に設けられ、前記外筒に対して前記中間筒及び前記内筒を曲げるための曲げ用アクチュエータと、
前記内筒の第2のガイド機構に固定され、前記中間筒の第1のガイド機構の孔及び前記外筒の第1のガイド機構の孔を通過し、前記曲げ用アクチュエータに巻回され、複数のストッパが固定されたワイヤと
を具備し、
前記複数のストッパの径は前記曲げ用アクチュエータから前記内筒の第2のガイド機構に向って順次大きくなり、
前記外筒の第1のガイド機構の孔の径及び前記中間筒の第1のガイド機構の孔の径は前記曲げ用アクチュエータから前記内筒の第2のガイド機構に向って順次大きくなり、
前記外筒の第1のガイド機構の孔は前記ストッパを通過させず、
前記中間筒の第1のガイド機構の孔は前記複数のストッパの少なくとも1つのストッパを通過させ、前記少なくとも1つのストッパの前記内筒側の前記複数のストッパの他の1つのストッパを通過させず、
前記中間筒の長さは該中間筒の第1のガイド機構の孔を通過したストッパと該ストッパに隣接して該孔を通過できないストッパとの間の距離より大きく、
前記内筒の長さは前記内筒内のストッパと前記内筒の第2のガイド機構との間の距離より大きいテレスコピック型ロボットアーム。
【請求項5】
前記孔は前記ストッパを受けるための溝付き孔である請求項4に記載のテレスコピック型ロボットアーム。
【請求項6】
前記ストッパは球状ストッパである請求項1又は4に記載のテレスコピック型ロボットアーム。
【請求項7】
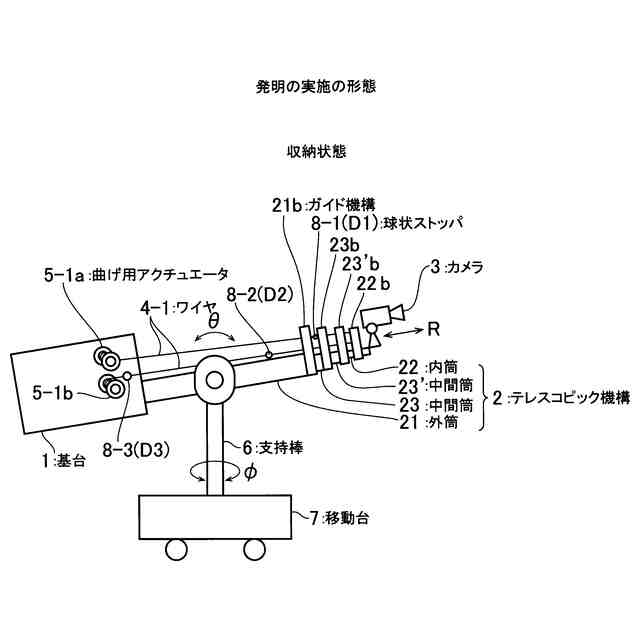
前記球状ストッパは、該球状ストッパに予め孔を形成し、前記ワイヤを該球状ストッパの該孔に1回又は複数回巻回したものである請求項6に記載のテレスコピック型ロボットアーム。
【請求項8】
前記球状ストッパは予め2つ割りした球状ストッパの中の円柱に前記ワイヤを1回又は複数回巻回した後に2つ割りした球状ストッパを接着したものである請求項6に記載のテレスコピック型ロボットアーム。
【請求項9】
前記球状ストッパは、該球状ストッパに予め孔を形成し、前記ワイヤを該球状ストッパの該孔に通し、該球状ストッパの前後で前記ワイヤの玉結びを形成した請求項6に記載のテレスコピック型ロボットアーム。
【請求項10】
前記球状ストッパは、該球状ストッパに予め孔を形成し、前記ワイヤを該球状ストッパの該孔に通し、該球状ストッパから前記ワイヤをかしめた請求項6に記載のテレスコピック型ロボットアーム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はテレスコピック型ロボットアーム及びその駆動方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
過酷事故後の原子力発電所において溶融した核燃料の観察をするためのカメラ駆動装置として、ロボットアームが必要である。
【0003】
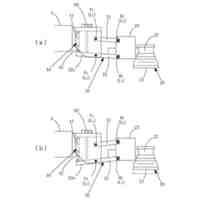
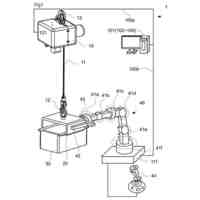
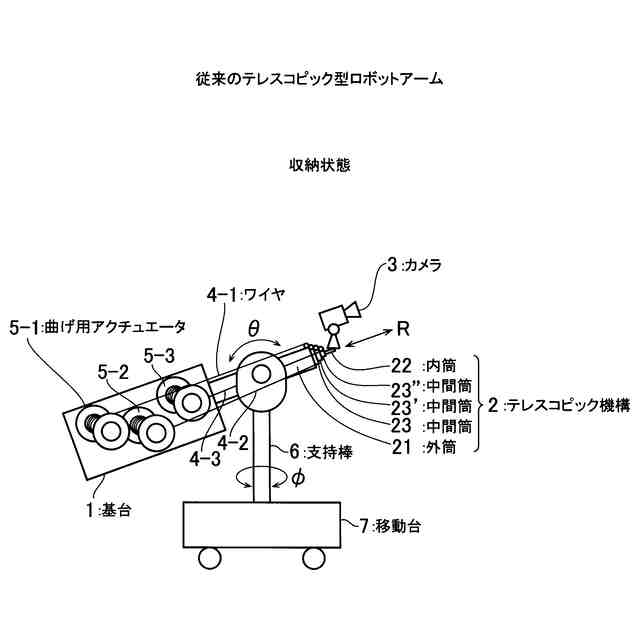
図7は従来のテレスコピック型ロボットアームの収納状態を示す正面図である(参照:特許文献1の図8~図14)。
【0004】
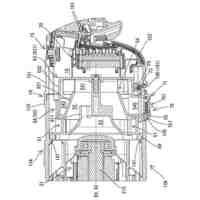
図7において、制御ユニット(図示せず)が内蔵されている基台1には外筒21が固定され、外筒21に内筒22を内挿し、外筒21と内筒22との間に中間筒23、23’、23”を挿入する。内筒22の先端にはカメラ3が設けられる。図7においては、中間筒23、23’、23”は3つであるが、他の数1つ、2つ、又は4つ以上になし得る。外筒21、中間筒23、23’、23”及び内筒22は先端側程細くなるテレスコピック機構2をなし、基台1内に固定された図示しない伸縮用アクチュエータ(モータ、ワイヤ駆動、油空圧シリンダー等)によって径方向Rに直動して伸縮する。内筒22、中間筒23、23’、23”の先端にはワイヤ(ロープ)4-1、4-2、4-3の一端が固定され、ワイヤ4-1、4-2、4-3の他端は基台1内に固定された曲げ用アクチュエータ(モータ)5-1、5-2、5-3に巻回され、これにより、ワイヤ4-1、4-2、4-3の張力は曲げ用アクチュエータ5-1、5-2、5-3によって調整される。
【0005】
また、外筒21は支持棒6に図示しないアクチュエータによって角方向θに回転自在に支持され、支持棒6は移動台7に図示しないアクチュエータによって角方向φに回転自在に支持される。
【0006】
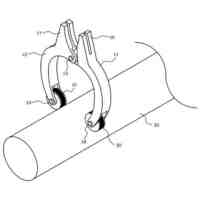
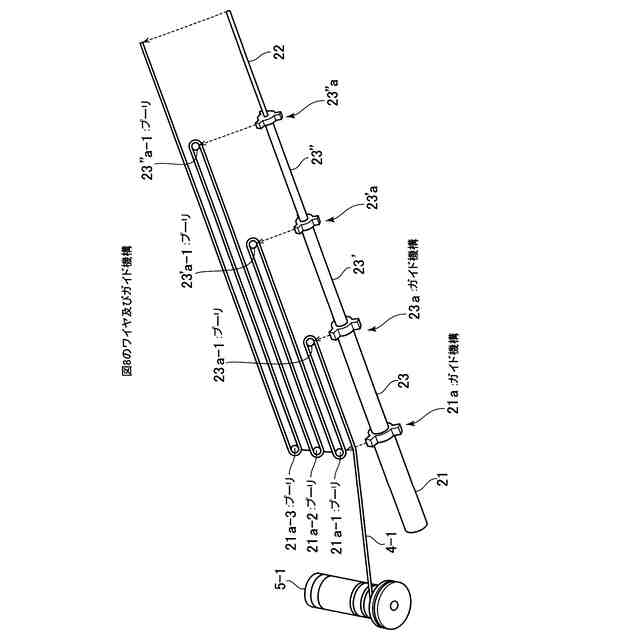
さらに、ワイヤ4-1、4-2、4-3を導くために、外筒21、中間筒23、23’、23”にガイド機構21a、23a、23’a、23”a(図8参照)を設けてある。この場合、ガイド機構21aは各ワイヤ4-1、4-2、4-3に対して3つのプーリ(図9参照)を有するのに対し、ガイド機構23a、23’a、23”aは、各ワイヤ4-1、4-2、4-3に対して1つのプーリ(図9参照)を有する。尚、ガイド機構は外筒21及び少なくとも1つの中間筒23、23’、23”に設ければよい。
【0007】
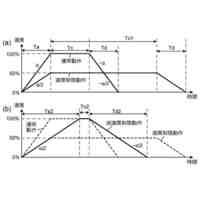
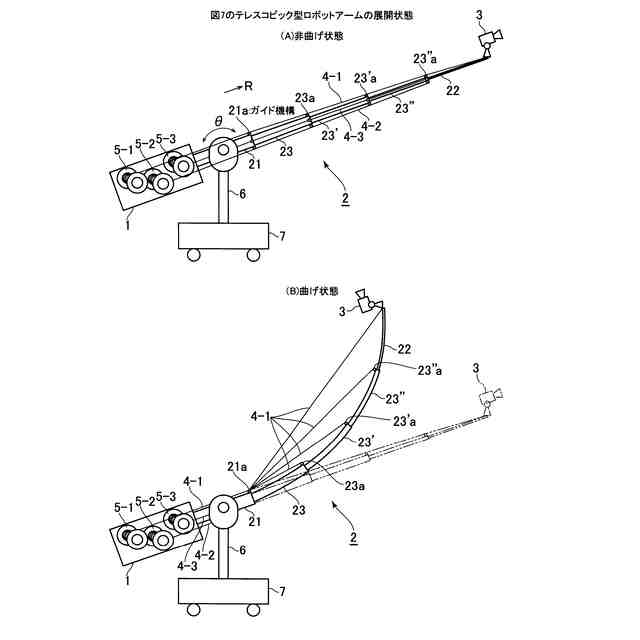
図8は図7のテレスコピック型ロボットアームの展開状態を示す正面図であり、(A)は非曲げ状態を示し、(B)は曲げ状態を示す。
【0008】
始めに、図8の(A)を参照すると、基台1に内蔵した図示しない伸縮用アクチュエータによりテレスコピック機構2を径方向Rに直動して展開すると、テレスコピック機構2の各筒21、23、23’、23”、22は構造的に片持ち機構をなすので、ロボットアームは消費電力を要せずに水平又は斜めの姿勢を保持することができる。このとき、ワイヤ4-1、4-2、4-3はガイド機構21a、23a、23’a、23”aによりテレスコピック機構2の外筒21、中間筒23、23’、23”及び内筒22に沿って存在する。
【0009】
次に、図8の(B)を参照すると、曲げ用アクチュエータ5-1によりワイヤ4-1を巻き上げると、ワイヤ4-1はガイド機構21aからガイド機構23a、23’a、23”aを折り返すことによって中間筒23、23’、23”に曲げモーメントを発生し、この結果、中間筒23、23’、23”も上方に大きく曲がる。また、ワイヤ4-1はガイド機構21aから内筒22に折り返すことによって内筒22に曲げモーメントを発生し、この結果、内筒22も上方に大きく曲がる。つまり、中間筒23、23’、23”及び内筒22はすべて上方に大きく曲がる。従って、ロボットアームの全体の変位量を大きくできる。
【0010】
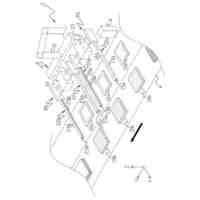
図9は図7、図8のワイヤ及びガイド機構の関係を示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
6日前
株式会社三協システム
製函機
4日前
株式会社三協システム
移載装置
3日前
CKD株式会社
把持装置
5日前
株式会社不二越
ロボット操作装置
11日前
太陽パーツ株式会社
アシストスーツ
6日前
SMC株式会社
着脱装置
4日前
株式会社ミクロブ
把持装置
5日前
株式会社不二越
ロボットシステム
6日前
株式会社不二越
ロボットシステム
3日前
トヨタ自動車株式会社
歩行ロボット
9日前
大和ハウス工業株式会社
ねじ回転工具
4日前
セイコーエプソン株式会社
ロボット
4日前
シヤチハタ株式会社
マーキング装置
9日前
シヤチハタ株式会社
マーキング装置
9日前
株式会社マキタ
電動工具
4日前
広島県
把持固定機構、及び把持固定ロボットハンド
9日前
株式会社マキタ
電動工具
4日前
株式会社ノア・テクニカ
灯具取外具及び灯具取外方法
3日前
株式会社ダイドー
作業支援器具
5日前
マックス株式会社
ネジ打ち機
5日前
マックス株式会社
打ち込み工具
5日前
オークラ輸送機株式会社
ハンド装置および物品移送装置
13日前
オークラ輸送機株式会社
ハンド装置および物品移送装置
13日前
工機ホールディングス株式会社
作業機
4日前
トヨタ自動車株式会社
マニピュレータを備えた移動ロボット
9日前
ファナック株式会社
対象物の干渉チェック方法
6日前
旭金属工業株式会社
クローフートレンチ
6日前
日鉄テックスエンジ株式会社
作動システム
12日前
株式会社三五
配管用マーキング装置
11日前
ユニパルス株式会社
物品移動装置システム、制御装置、昇降装置、移動装置
6日前
株式会社日清製粉グループ本社
ロボットハンド、反転装置及び反転方法
11日前
トヨタ自動車株式会社
データ生成システム、データ生成方法、及びプログラム
3日前
茶屋テクノロジー株式会社
エンドエフェクタ及びワーク研磨方法
9日前
ニデックインスツルメンツ株式会社
ロボットの制御方法及びロボット制御装置
13日前
ニデックインスツルメンツ株式会社
ロボットの異常検出方法及び異常検出装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ