TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088083
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202533
出願日
2023-11-30
発明の名称
検出方法、ロボットシステムおよびプログラム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】装置構成の簡素化、低コスト化を図りつつ動力伝達機構の過負荷状態を検出する検出方法、ロボットシステムおよびプログラムを提供すること。
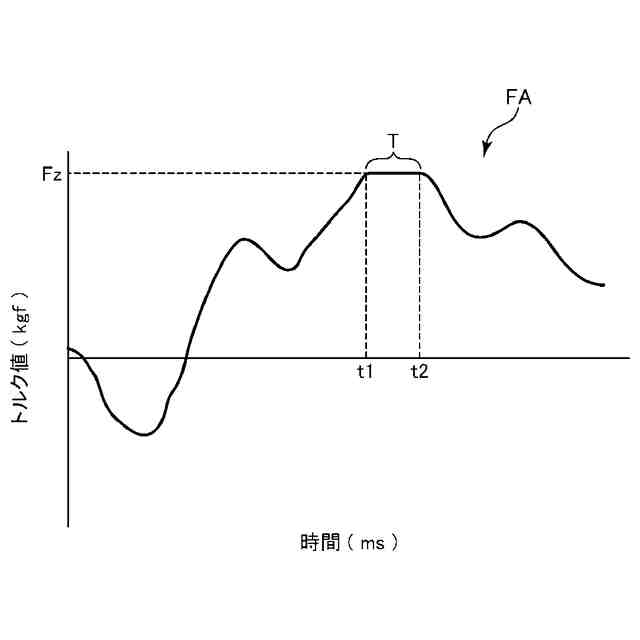
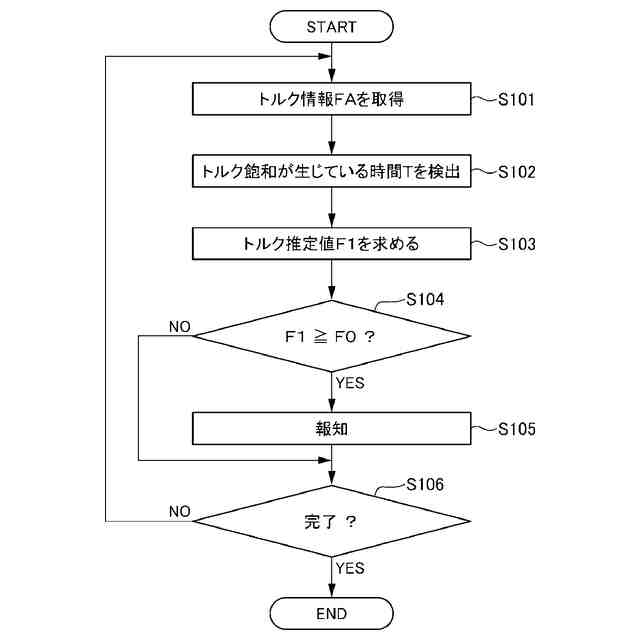
【解決手段】モーターを駆動源とする動力伝達機構の過負荷状態を検出する検出方法であって、モーターの出力トルクの経時的な情報であるトルク情報を取得する第1ステップと、予め定められたトルク飽和値とトルク情報とに基づいて、モーターにトルク飽和が生じている時間Tを検出する第2ステップと、検出した時間Tの長さに基づいて、モーターの出力トルクのトルク推定値F1を求める第3ステップと、動力伝達機構が許容し得る最大負荷に対応する出力トルクの基準値F0と、求めたトルク推定値F1と、を比較する第4ステップと、第4ステップにおける比較結果がF1≧F0である場合、動力伝達機構の過負荷状態を報知する第5ステップと、を含むことを特徴とする検出方法。
【選択図】図4
特許請求の範囲
【請求項1】
モーターを駆動源とする動力伝達機構の過負荷状態を検出する検出方法であって、
前記モーターの出力トルクの経時的な情報であるトルク情報を取得する第1ステップと、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する第2ステップと、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める第3ステップと、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する第4ステップと、
前記第4ステップにおける比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する第5ステップと、を含むことを特徴とする検出方法。
続きを表示(約 1,100 文字)
【請求項2】
前記第3ステップでは、前記時間Tの累積値が大きくなるにつれて前記トルク推定値F1を大きくする請求項1に記載の検出方法。
【請求項3】
前記第3ステップでは、前記時間Tと前記トルク推定値F1との関係を示す関数に基づいて前記トルク推定値F1を求める請求項1または2に記載の検出方法。
【請求項4】
前記第3ステップでは、下記式(1)に基づいて演算を行う請求項3に記載の検出方法。
F1=Fz+T×k…(1)
(ただし、kは、係数、Fzは、前記モーターの前記出力トルクの定格最大値)
【請求項5】
複数の前記モーターの各々を対象とし、各前記モーター毎に前記基準値F0を設定し、前記第1ステップ、前記第2ステップ、前記第3ステップおよび前記第4ステップを実行する請求項1に記載の検出方法。
【請求項6】
モーターおよび動力伝達機構を有するロボットアームを備えるロボットと、
前記モーターを駆動して前記ロボットアームの作動を制御する制御装置と、を備え、
前記制御装置は、前記モーターの出力トルクの経時的な情報であるトルク情報を取得する取得部と、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する検出部と、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める演算部と、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する比較部と、
前記比較部の比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する報知信号を生成する報知信号生成部と、を備えることを特徴とするロボットシステム。
【請求項7】
モーターを駆動源とする動力伝達機構の過負荷状態を検出するためのプログラムであって、
前記モーターの出力トルクの経時的な情報であるトルク情報を取得する第1ステップと、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する第2ステップと、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める第3ステップと、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する第4ステップと、
前記第4ステップにおける比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する第5ステップと、を実行するためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検出方法、ロボットシステムおよびプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば、特許文献1に記載されているロボットは、複数のアームと、隣接するアーム同士を回転可能に接続する関節部とを備えるロボットアームを有し、このロボットアームを所望の姿勢となるように駆動して、ワークに対し、搬送、組立、加工、検査等の作業を行う。このロボットアームの各関節部には、アームを回転駆動するための駆動部として、関節機構が設置されている。関節機構は、モーターと、モーターの回転速度を減速する減速機と、を有する。
【0003】
また、特許文献1では、モーターの出力軸に、フリクションドライブ機構が接続されている。フリクションドライブ機構は、モーターの出力軸に対して接触する接触部を有し、接触部の接触荷重を調整することにより、モーターの出力トルクを調整することができる。また、例えば、モーターの出力トルクと反対方向のトルクが関節に加わった際、接触部の接触荷重を小さくすることにより、反対方向のトルクを逃がすことができる。よって、関節に過大な負荷がかかるのを防止することができる。すなわち、過負荷状態を検知し、解消することができる。
【先行技術文献】
【特許文献】
【0004】
特開平6-320471号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載されている構成では、過負荷状態を検知するためにフリクションドライブ機構を設ける必要があり、その分、コストが増大してしまうとともに、装置構成が複雑になってしまう。
【0006】
本発明の検出方法は、モーターを駆動源とする動力伝達機構の過負荷状態を検出する検出方法であって、
前記モーターの出力トルクの経時的な情報であるトルク情報を取得する第1ステップと、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する第2ステップと、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める第3ステップと、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する第4ステップと、
前記第4ステップにおける比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する第5ステップと、を含む。
【0007】
本発明のロボットシステムは、モーターおよび動力伝達機構を有するロボットアームを備えるロボットと、
前記モーターを駆動して前記ロボットアームの作動を制御する制御装置と、を備え、
前記制御装置は、前記モーターの出力トルクの経時的な情報であるトルク情報を取得する取得部と、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する検出部と、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める演算部と、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する比較部と、
前記比較部の比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する報知信号を生成する報知信号生成部と、を備える。
【0008】
本発明のプログラムは、モーターを駆動源とする動力伝達機構の過負荷状態を検出するためのプログラムであって、
前記モーターの出力トルクの経時的な情報であるトルク情報を取得する第1ステップと、
予め定められたトルク飽和値と前記トルク情報とに基づいて、前記モーターにトルク飽和が生じている時間Tを検出する第2ステップと、
検出した前記時間Tの長さに基づいて、前記モーターの前記出力トルクのトルク推定値F1を求める第3ステップと、
前記動力伝達機構が許容し得る最大負荷に対応する前記出力トルクの基準値F0と、求めた前記トルク推定値F1と、を比較する第4ステップと、
前記第4ステップにおける比較結果がF1≧F0である場合、前記動力伝達機構の過負荷状態を報知する第5ステップと、を実行するためのものである。
【図面の簡単な説明】
【0009】
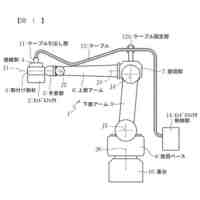
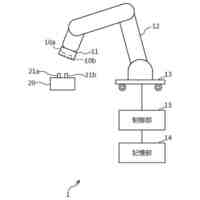
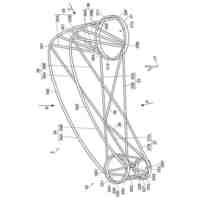
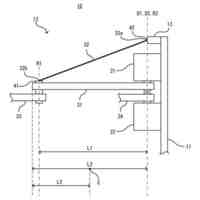
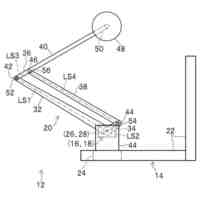
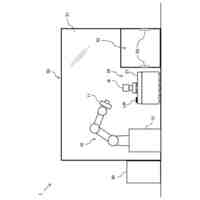
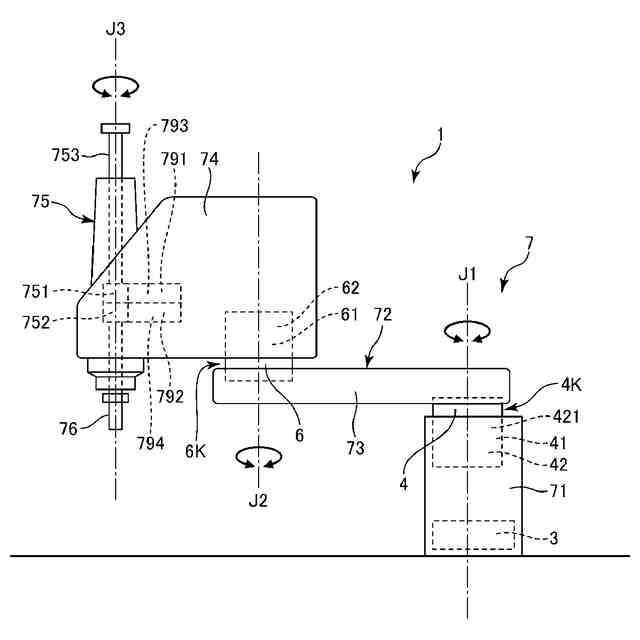
本発明の実施形態に係るロボットシステムの概略構成図である。
図1に示すロボットシステムのブロック図である。
トルク情報の一例を示すグラフである。
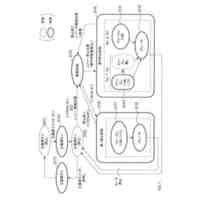
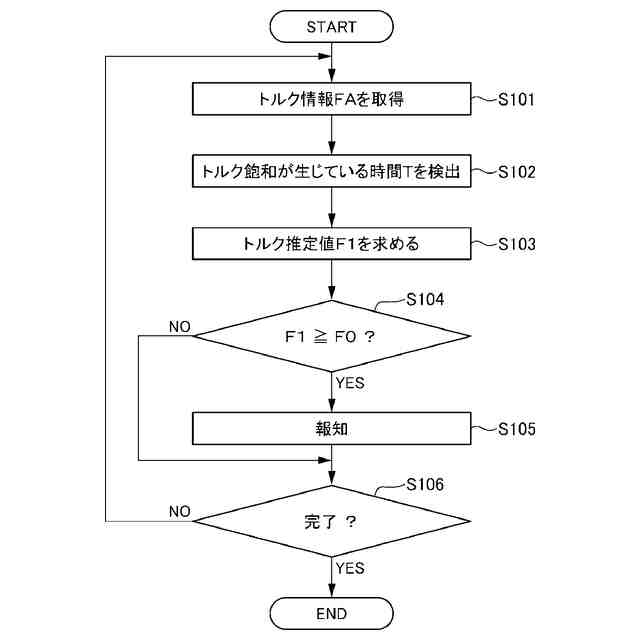
本発明の検出方法の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の検出方法、ロボットシステムおよびプログラムを添付図面に示す実施形態に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
22日前
株式会社ダイヘン
移動体
25日前
トヨタ自動車株式会社
関節機構
27日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
学校法人五島育英会
アーム機構
27日前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
21日前
株式会社スター精機
吸着パッド
21日前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社スター精機
産業用ロボット
19日前
オークラ輸送機株式会社
ハンド装置
6日前
株式会社マキタ
電動作業機
28日前
川崎重工業株式会社
ロボットシステム
7日前
株式会社マキタ
電動作業機
28日前
株式会社リコー
多関節ロボット
26日前
株式会社ダイヘン
ロボット制御システム
25日前
株式会社ジャノメ
ロボット
15日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
セイコーエプソン株式会社
ロボット
21日前
セイコーエプソン株式会社
ロボット
1日前
小倉クラッチ株式会社
ロボット用ツール交換装置
21日前
株式会社マキタ
回転工具
8日前
株式会社マキタ
電動工具
5日前
個人
回転移動式工具ホルダ
1か月前
オムロン株式会社
ロボット
18日前
オムロン株式会社
ロボット
18日前
個人
工具、工具セット、部材取外し方法
1日前
SMC株式会社
コンプライアンスユニット
12日前
オムロン株式会社
撮影システム
21日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社デンソーウェーブ
産業用ロボット及び吸着装置
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ