TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089373
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2025044872,2020183006
出願日
2025-03-19,2020-10-30
発明の名称
人力駆動車用の制御装置
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62M
6/45 20100101AFI20250605BHJP(鉄道以外の路面車両)
要約
【課題】ユーザビリティに貢献できる人力駆動車両用の制御装置を提供する。
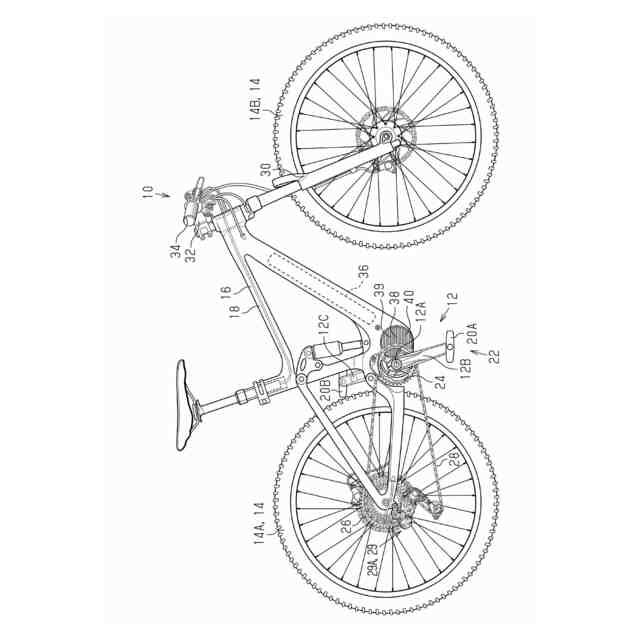
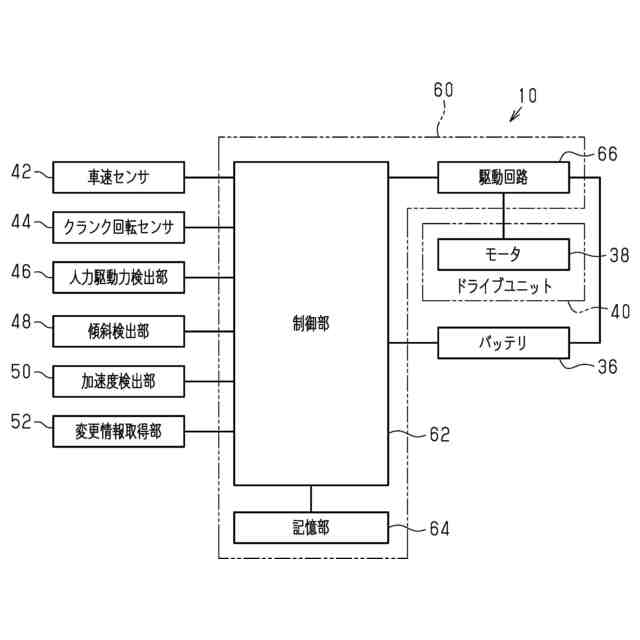
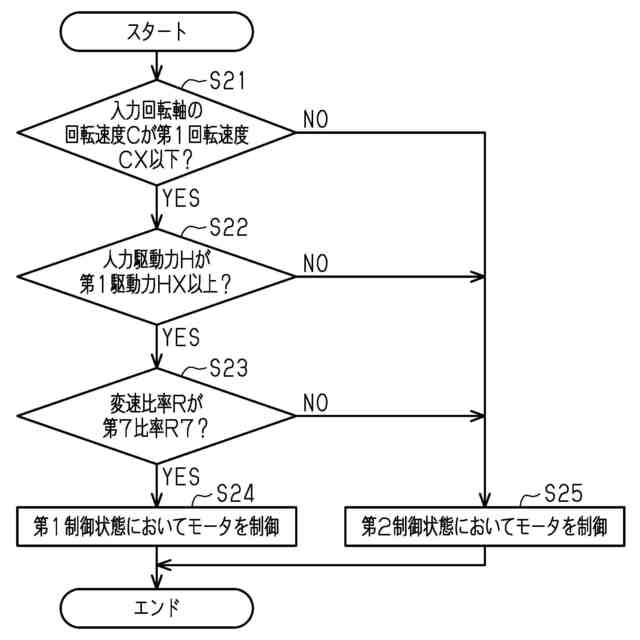
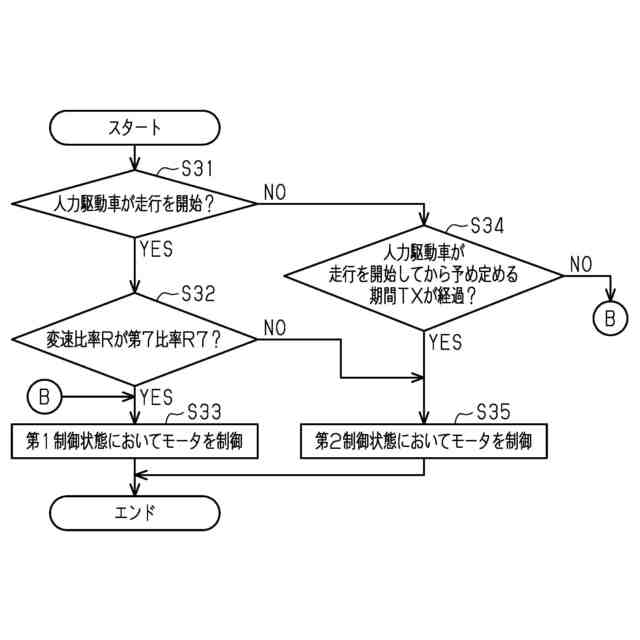
【解決手段】人力駆動車用の制御装置は、人力駆動車に推進力を付与するモータを制御するように構成される制御部を含み、制御部は、人力駆動車の入力回転軸の回転速度が第1回転速度以下、人力駆動車に入力される人力駆動力が第1駆動力以上、かつ、入力回転軸と人力駆動車の車輪との間の動力伝達経路における変速比率が第7比率の場合、および、人力駆動車が走行を開始し、かつ、変速比率が第7比率の場合、の少なくとも1つにおいて、第1制御状態においてモータを制御し、入力回転軸の回転速度が第1回転速度以下、人力駆動力が第1駆動力以上、かつ、変速比率が第7比率とは異なる第8比率の場合、および、人力駆動車が走行を開始し、かつ、変速比率が第8比率の場合、の少なくとも1つにおいて、第1制御状態とは異なる第2制御状態においてモータを制御する。
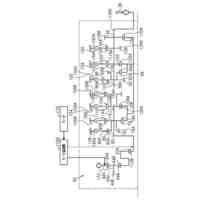
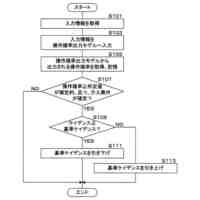
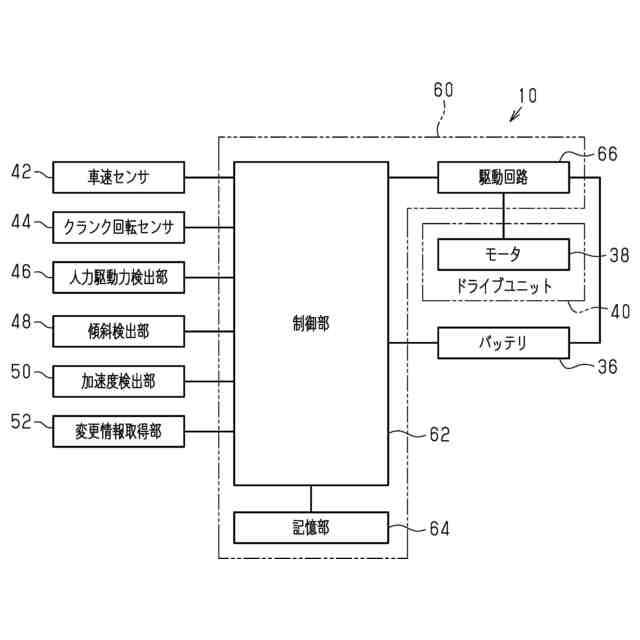
【選択図】図2
特許請求の範囲
【請求項1】
人力駆動車用の制御装置であって、
人力駆動車に推進力を付与するモータを制御するように構成される制御部を含み、
前記制御部は、
前記人力駆動車の入力回転軸の回転速度が第1回転速度以下、前記人力駆動車に入力される人力駆動力が第1駆動力以上、かつ、前記入力回転軸と前記人力駆動車の車輪との間の動力伝達経路における変速比率が第7比率の場合、および、前記人力駆動車が走行を開始し、かつ、前記変速比率が前記第7比率の場合、の少なくとも1つにおいて、第1制御状態において前記モータを制御し、
前記入力回転軸の回転速度が前記第1回転速度以下、前記人力駆動力が前記第1駆動力以上、かつ、前記変速比率が前記第7比率とは異なる第8比率の場合、および、前記人力駆動車が走行を開始し、かつ、前記変速比率が前記第8比率の場合、の少なくとも1つにおいて、前記第1制御状態とは異なる第2制御状態において前記モータを制御する、制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記第8比率は、前記第7比率よりも大きく、
前記制御部は、前記第2制御状態において、前記人力駆動力に対する前記モータによるアシスト力のアシスト比率が、前記第1制御状態における前記アシスト比率よりも増加するように、前記人力駆動車に入力される人力駆動力に応じて前記モータを制御する、請求項1に記載の制御装置。
【請求項3】
前記第8比率は、前記第7比率よりも大きく、
前記制御部は、前記第2制御状態において、前記モータの出力の最大値が、前記第1制御状態における前記モータの出力の前記最大値よりも増加するように、前記人力駆動車に入力される人力駆動力に応じて前記モータを制御する、請求項1または2に記載の制御装置。
【請求項4】
前記第8比率は、前記第7比率よりも大きく、
前記制御部は、前記第2制御状態において、前記人力駆動力の増加速度に対する前記モータの出力の増加速度の第1変化率が、前記第1制御状態における前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率よりも増加するように、前記人力駆動車に入力される人力駆動力に応じて前記モータを制御する、請求項1から3のいずれか一項に記載の制御装置。
【請求項5】
前記第8比率は、前記第7比率よりも大きく、
前記制御部は、前記第2制御状態において、前記人力駆動力の減少速度に対する前記モータの出力の減少速度の第2変化率が、前記第1制御状態における前記人力駆動力の減少速度に対する前記モータの出力の減少速度の前記第2変化率よりも減少するように、前記人力駆動車に入力される人力駆動力に応じて前記モータを制御する、請求項1から4のいずれか一項に記載の制御装置。
【請求項6】
前記制御部は、前記人力駆動車の入力回転軸の回転速度が前記第1回転速度よりも大きく、かつ、前記変速比率が前記第7比率の場合、または、前記人力駆動車に入力される人力駆動力が前記第1駆動力未満であり、かつ、前記変速比率が前記第7比率の場合、前記第2制御状態において前記モータを制御する、請求項1から5のいずれか一項に記載の制御装置。
【請求項7】
人力駆動車用の制御装置であって、
人力駆動車の推進力を付与するモータを制御するように構成される制御部を含み、
前記制御部は、
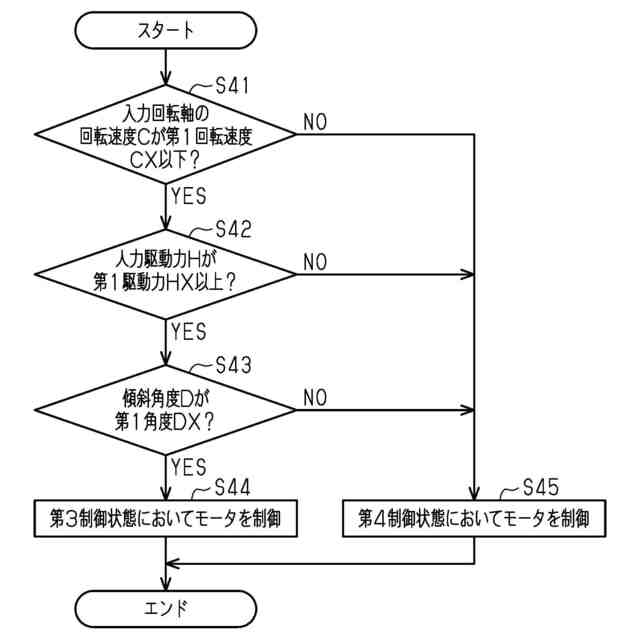
前記人力駆動車の入力回転軸の回転速度が第1回転速度以下、前記人力駆動車に入力される人力駆動力が第1駆動力以上、かつ、前記人力駆動車の傾斜角度が第1角度の場合、第3制御状態において前記モータを制御し、
前記入力回転軸の回転速度が前記第1回転速度以下、前記人力駆動力が前記第1駆動力以上、かつ、前記人力駆動車の傾斜角度が前記第1角度とは異なる第2角度の場合、前記第3制御状態とは異なる第4制御状態において前記モータを制御する、制御装置。
【請求項8】
前記傾斜角度は、前記人力駆動車が上り坂を走行する場合の前記人力駆動車のピッチ角度であり、
前記第1角度は、前記第2角度よりも大きく、
前記制御部は、前記第3制御状態における前記モータの出力の最大値が、前記第4制御状態における前記モータの出力の前記最大値よりも大きくなるように、前記モータを制御する、請求項7に記載の制御装置。
【請求項9】
前記傾斜角度は、前記人力駆動車が下り坂を走行する場合の前記人力駆動車のピッチ角度であり、
前記第1角度は、前記第2角度よりも大きく、
前記制御部は、前記第3制御状態における前記モータの出力の最大値が、前記第4制御状態における前記モータの出力の前記最大値よりも小さくなるように、前記モータを制御する、請求項7に記載の制御装置。
【請求項10】
前記制御部は、前記入力回転軸の回転速度が第1回転速度よりも大きく、かつ、前記傾斜角度が前記第1角度の場合、または、前記人力駆動車に入力される人力駆動力が第1駆動力未満であり、かつ、前記傾斜角度が前記第1角度の場合、前記第4制御状態において前記モータを制御する、請求項8または9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、人力駆動車用の制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば、特許文献1は、人力駆動車用の制御装置を開示する。特許文献1の人力駆動車用の制御装置は、人力駆動車両の推進をアシストするモータを人力駆動車に入力される人力駆動力に応じて制御する。
【先行技術文献】
【特許文献】
【0003】
特開2016-22798号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的の1つは、ユーザビリティを向上できる人力駆動車両用の制御装置を提供することである。
【課題を解決するための手段】
【0005】
本開示の第1側面に従う制御装置は、人力駆動車用の制御装置であって、人力駆動車に推進力を付与するモータを、前記人力駆動車に入力される人力駆動力に応じて制御するように構成される制御部を含み、前記制御部は、前記人力駆動車の入力回転軸と前記人力駆動車の車輪との間の動力伝達経路における変速比率に関する変速情報に応じて、前記モータの出力の最大値、前記人力駆動力の増加速度に対する前記モータの出力の増加速度の第1変化率、および、前記人力駆動力の減少速度に対する前記モータの出力の減少速度の第2変化率の少なくとも1つを変更するように前記モータを制御する。
第1側面の制御装置によれば、変速情報に応じて、モータの出力の最大値、人力駆動力の増加速度に対するモータの出力の増加速度の第1変化率、および、人力駆動力の減少速度に対するモータの出力の減少速度の第2変化率の少なくとも1つが好適な値になるようにモータを制御できるため、ユーザビリティを向上できる。
【0006】
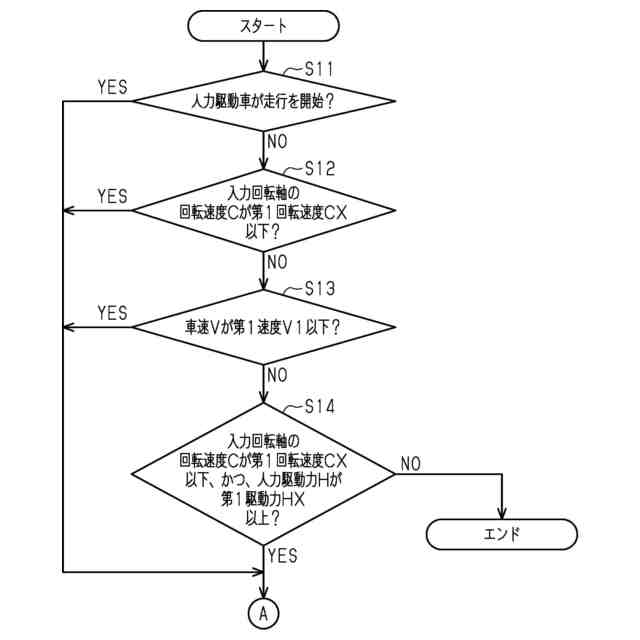
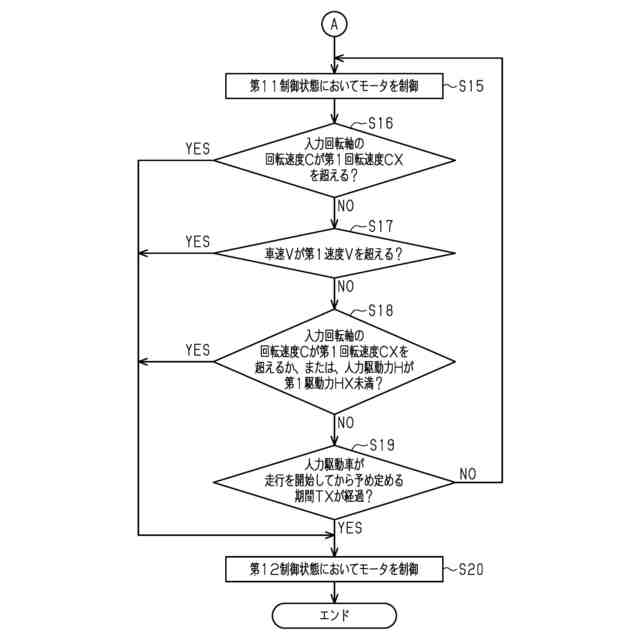
本開示の第1側面に従う第2側面の制御装置において、前記制御部は、前記人力駆動車が走行を開始する場合、前記入力回転軸の回転速度が第1回転速度以下の場合、前記人力駆動車の車速が第1速度以下の場合、および、前記入力回転軸の回転速度が前記第1回転速度以下かつ前記人力駆動力が第1駆動力以上の場合、の少なくとも1つにおいて、前記変速情報に応じて、前記モータの出力の前記最大値、前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率、および、前記人力駆動力の減少速度に対する前記モータの出力の減少速度の前記第2変化率の少なくとも1つを変更するように前記モータを制御する。
第2側面の制御装置によれば、人力駆動車が走行を開始する場合、入力回転軸の回転速度が第1回転速度以下の場合、人力駆動車の車速が第1速度以下の場合、および、入力回転軸の回転速度が第1回転速度以下かつ人力駆動力が第1駆動力以上の場合、の少なくとも1つにおいて、モータを好適に制御できる。
【0007】
本開示の第1または第2側面に従う第3側面の制御装置において、前記制御部は、前記変速情報に応じて、前記モータの出力の前記最大値を変更するように前記モータを制御し、前記変速比率が第1比率よりも小さい場合における前記モータの出力の前記最大値が、前記変速比率が前記第1比率以上の場合における前記モータの出力の前記最大値よりも減少するように前記モータを制御する。
第3側面の制御装置によれば、変速比率が減少すると、人力駆動力による車輪の回転トルクが増加するが、モータの出力の最大値を減少させることによって、車輪の回転トルクが増加しすぎることを抑制できる。
【0008】
本開示の第1から第3側面のいずれか1つに従う第4側面の制御装置において、前記制御部は、前記変速情報に応じて、前記モータの出力の前記最大値を変更するように前記モータを制御し、前記変速比率が第2比率よりも大きい場合における前記モータの出力の前記最大値を、前記変速比率が前記第2比率以下の場合における前記モータの出力の前記最大値よりも増加するように前記モータを制御する。
第4側面の制御装置によれば、変速比率が増加すると、入力回転軸を回転させるために必要な回転トルクが増加するが、モータの出力の最大値を増加させることによって、ライダーが感じる負荷の増加を低減できる。
【0009】
本開示の第1から第4側面のいずれか1つに従う第5側面の制御装置において、前記制御部は、前記変速情報に応じて、前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率を変更するように前記モータを制御し、前記変速比率が第3比率よりも小さい場合における前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率を、前記変速比率が前記第3比率以上の場合における前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率よりも減少するように前記モータを制御する。
第5側面の制御装置によれば、変速比率が減少すると、人力駆動力による車輪の回転トルクが増加するが、人力駆動力の増加速度に対するモータの出力の増加速度の第1変化率を減少させることによって、車輪の回転トルクが増加しすぎることを抑制できる。
【0010】
本開示の第1から第5側面のいずれか1つに従う第6側面の制御装置において、前記制御部は、前記変速情報に応じて、前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率を変更するように前記モータを制御し、前記変速比率が第4比率よりも大きい場合における前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率を、前記変速比率が前記第4比率以下の場合における前記人力駆動力の増加速度に対する前記モータの出力の増加速度の前記第1変化率よりも増加するように前記モータを制御する。
第6側面の制御装置によれば、変速比率が増加すると、入力回転軸を回転させるために必要な回転トルクが増加するが、人力駆動力の増加速度に対するモータの出力の増加速度の第1変化率を増加させることによって、ライダーが感じる負荷の増加を低減できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社シマノ
釣竿
1か月前
株式会社シマノ
釣竿
24日前
株式会社シマノ
釣竿
7日前
株式会社シマノ
ルアー
29日前
株式会社シマノ
ルアー
8日前
株式会社シマノ
釣り具
29日前
株式会社シマノ
両軸受リール
2か月前
株式会社シマノ
エンドグリップ
29日前
株式会社シマノ
魚釣用電動リール
1か月前
株式会社シマノ
釣糸ガイド及び釣竿
1か月前
株式会社シマノ
人力駆動車用のコンポーネント
3日前
株式会社シマノ
人力駆動車用のコンポーネント
3日前
株式会社シマノ
人力駆動車用の変速機および人力駆動車用のコンポーネント
3日前
株式会社シマノ
人力駆動車用の変速機および人力駆動車用のコンポーネント
3日前
株式会社シマノ
人力駆動車用の変速装置および人力駆動車用のコンポーネント
3日前
株式会社シマノ
人力駆動車用の制御装置
24日前
株式会社シマノ
人力駆動車用の制御装置
1か月前
株式会社シマノ
人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラム
2か月前
株式会社シマノ
人力駆動車用の制御システム
17日前
株式会社シマノ
人力駆動車制御装置、コンピュータプログラム、人力駆動車制御方法、人力駆動車制御データ設定方法、及び人力駆動車制御システム
2か月前
個人
カート
25日前
個人
走行装置
1か月前
個人
電動走行車両
1か月前
個人
乗り物
2か月前
個人
電動モビリティ
5か月前
個人
閂式ハンドル錠
1か月前
個人
発音装置
4か月前
個人
折り畳み自転車
8か月前
個人
自転車用傘捕捉具
9か月前
個人
“zen-go.”
2日前
個人
ルーフ付きトライク
8日前
個人
自由方向乗車自転車
5か月前
個人
体重掛けリフト台車
8か月前
個人
キャンピングトライク
6か月前
個人
アタッチメント
9か月前
個人
自転車用荷物台
8か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ