TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097521
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023213750
出願日
2023-12-19
発明の名称
磁気ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G11B
5/596 20060101AFI20250624BHJP(情報記憶)
要約
【課題】 適切なリード位置を高速に探索することのできる磁気ディスク装置を提供する。
【解決手段】 磁気ディスク装置は、ディスクと、リードヘッドと、制御部と、を備える。上記制御部は、上記ディスクがm1回転する期間内に、n1個の半径位置に上記リードヘッドを移動させ、各々の上記半径位置にてトラックのデータをリードする第1リード処理を実行するリード処理部と、上記第1リード処理によるリードにて得た複数の第1信号の品質を比較し、上記複数の第1信号の内から最高品質の第1信号を導出する比較部と、上記n1個の半径位置のうち、上記最高品質の第1信号を導出した際の半径位置を上記トラックのデータのリードに適切である第1適切リード位置と判断する判断部と、を有する。1≦m1<n1である。
【選択図】図20
特許請求の範囲
【請求項1】
記録層にトラックを有するディスクと、
前記ディスクの前記記録層からデータをリードするリードヘッドと、
前記ディスクがm1回転する期間内に、前記ディスクの半径方向に互いにずれたn1個の半径位置に前記リードヘッドを移動させ、各々の前記半径位置にて前記トラックのデータをリードする第1リード処理を実行するリード処理部と、
前記第1リード処理によるリードにて得た複数の第1信号の品質を比較し、前記複数の第1信号の内から最高品質の第1信号を導出する比較部と、
前記n1個の半径位置のうち、前記最高品質の第1信号を導出した際の半径位置を前記トラックのデータのリードに適切である第1適切リード位置と判断する判断部と、を有する制御部と、を備え、
1≦m1<n1である、
磁気ディスク装置。
続きを表示(約 1,200 文字)
【請求項2】
前記トラックのデータをリードする際、前記リード処理部は、前記第1適切リード位置に前記リードヘッドを移動させ、前記第1適切リード位置にて前記トラックのデータをリードする、
請求項1に記載の磁気ディスク装置。
【請求項3】
前記第1リード処理によるリードにて得た前記複数の第1信号の品質を測定するリードチャネルをさらに備える、
請求項1に記載の磁気ディスク装置。
【請求項4】
前記複数の第1信号の品質は、前記複数の第1信号の振幅であり、
前記最高品質の第1信号は、前記複数の第1信号のうち振幅が最大となる信号である、
請求項1に記載の磁気ディスク装置。
【請求項5】
前記最高品質の第1信号は、前記複数の第1信号のうち振幅が極大となる信号である、
請求項4に記載の磁気ディスク装置。
【請求項6】
前記複数の第1信号の品質は、前記複数の第1信号のビットエラーレートであり、
前記最高品質の第1信号は、前記複数の第1信号のうちビットエラーレートが最小となる信号である、
請求項1に記載の磁気ディスク装置。
【請求項7】
前記最高品質の第1信号は、前記複数の第1信号のうちビットエラーレートが極小となる信号である、
請求項6に記載の磁気ディスク装置。
【請求項8】
前記第1リード処理を実行する際、
前記リード処理部は、第1シーク方向に前記リードヘッドを等速度でシークさせる、
請求項1に記載の磁気ディスク装置。
【請求項9】
前記n1個の半径位置は、前記半径方向に等間隔で設けられ、
前記第1リード処理を実行する際、
前記リード処理部は、前記トラックのデータを一定の時間間隔でリードする、
請求項8に記載の磁気ディスク装置。
【請求項10】
前記リード処理部は、前記第1リード処理に続けてシーク動作、回転待ち動作、及び第2リード処理を順に実行し、
前記第2リード処理は、前記ディスクがm2回転する期間内に、前記第1シーク方向に前記リードヘッドをシークさせ、前記半径方向に互いにずれたn2個の半径位置に前記リードヘッドを移動させ、各々の前記半径位置にて前記トラックのデータをリードする処理であり、
1≦m2<n2であり、
前記第2リード処理時に前記リードヘッドをシークさせる動作は、前記第1リード処理時に前記リードヘッドをシークさせる動作と同一であり、
前記第1リード処理にて前記トラックのデータを最初にリードする位置と、前記第2リード処理にて前記トラックのデータを最初にリードする位置とは、前記ディスクの円周方向に互いにずれている、
請求項8に記載の磁気ディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、磁気ディスク装置に関する。
続きを表示(約 5,300 文字)
【背景技術】
【0002】
磁気ディスク装置として、ディスクの半径方向に間隔に置いて複数のトラックをライトする通常記録(Conventional Magnetic Recording:CMR)型式(又は、従来記録型式)の磁気ディスク装置、ディスクの半径方向に複数のトラックを重ね書きする瓦記録(Shingled Magnetic Recording:SMR、又はShingled Write Recording:SWR)型式の磁気ディスク装置、及び通常記録型式及び瓦記録型式を選択して実行するハイブリッド記録型式の磁気ディスク装置が知られている。
【0003】
磁気ディスク装置は、ライトヘッドとリードヘッドとを含むヘッドを有している。ライトヘッドとリードヘッドとは、ディスクの円周方向に間隔を空けて設けられている。ヘッドをディスクの内周側までシークしたり、ディスクの外周側までシークしたりする程、ライトヘッドとリードヘッドとが半径方向にオフセットし易くなる。そのため、磁気ディスク装置は、ライトヘッドでディスクに所定のトラックをライトした際のリードヘッドの位置から半径方向に所定の距離をオフセットした位置にリードヘッドをオフセットして配置することで、このトラックのデータをリードすることができる。
【先行技術文献】
【特許文献】
【0004】
特開2012-079387号公報
特開2019-204566号公報
特開2022-003599号公報
特開2022-047914号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本実施形態は、適切なリード位置を高速に探索することのできる磁気ディスク装置を提供する。
【課題を解決するための手段】
【0006】
一実施形態に係る磁気ディスク装置は、
記録層にトラックを有するディスクと、
前記ディスクの前記記録層からデータをリードするリードヘッドと、
前記ディスクがm1回転する期間内に、前記ディスクの半径方向に互いにずれたn1個の半径位置に前記リードヘッドを移動させ、各々の前記半径位置にて前記トラックのデータをリードする第1リード処理を実行するリード処理部と、
前記第1リード処理によるリードにて得た複数の第1信号の品質を比較し、前記複数の第1信号の内から最高品質の第1信号を導出する比較部と、
前記n1個の半径位置のうち、前記最高品質の第1信号を導出した際の半径位置を前記トラックのデータのリードに適切である第1適切リード位置と判断する判断部と、を有する制御部と、を備え、
1≦m1<n1である。
【図面の簡単な説明】
【0007】
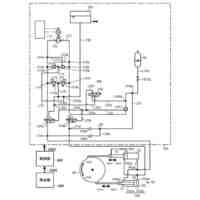
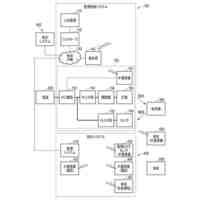
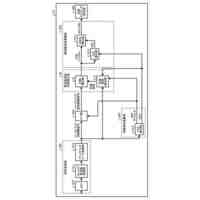
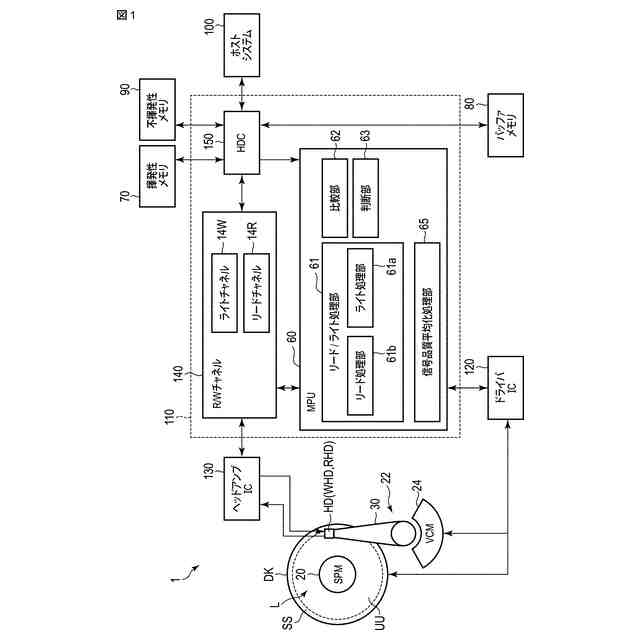
図1は、比較例に係る磁気ディスク装置の構成を示すブロック図である。
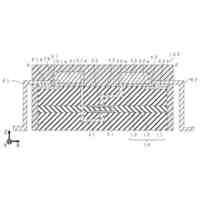
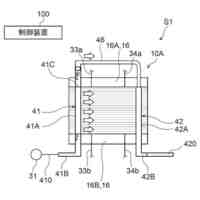
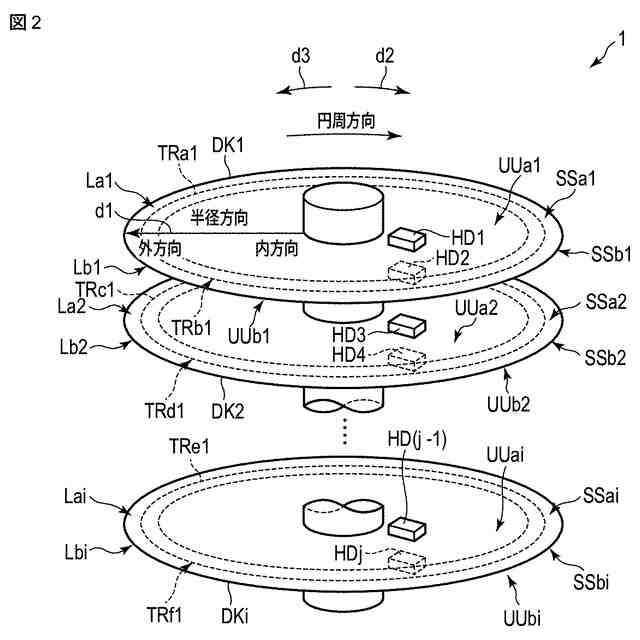
図2は、上記磁気ディスク装置の一部を示す斜視図であり、複数枚のディスク及び複数のヘッドを示す図である。
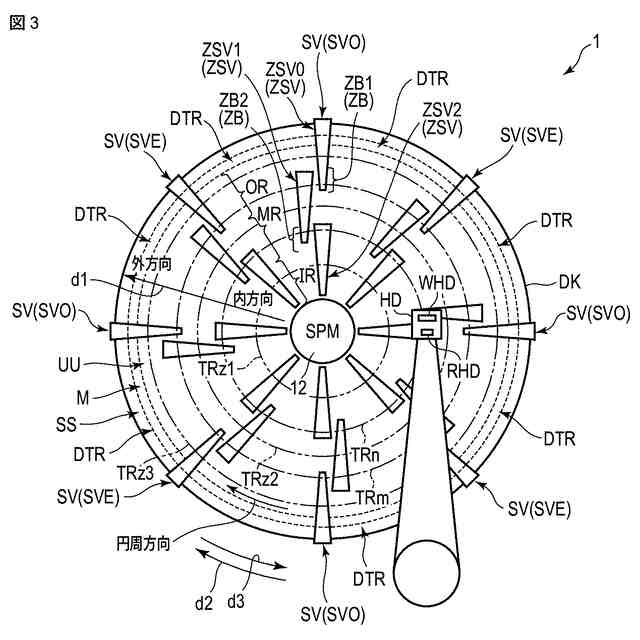
図3は、上記比較例に係る1枚のディスクの複数のサーボ領域及び複数のデータ領域の配置の一例を示す概略図である。
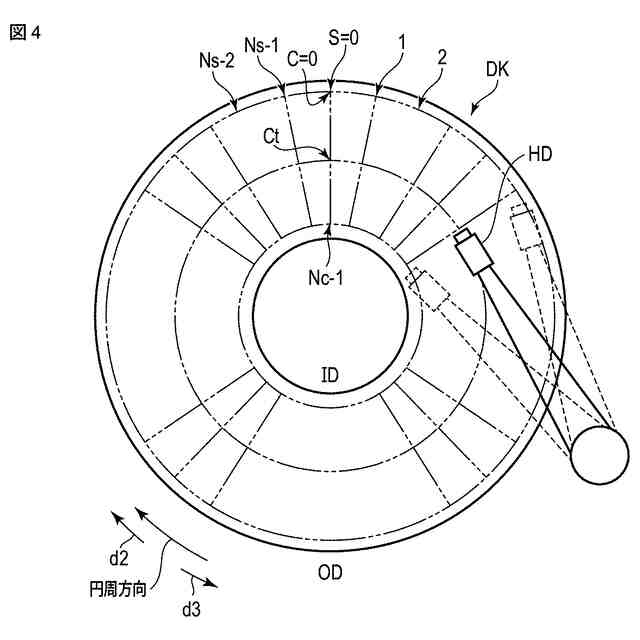
図4は、上記比較例に係るディスクに対するヘッドの配置の一例を示す模式図である。
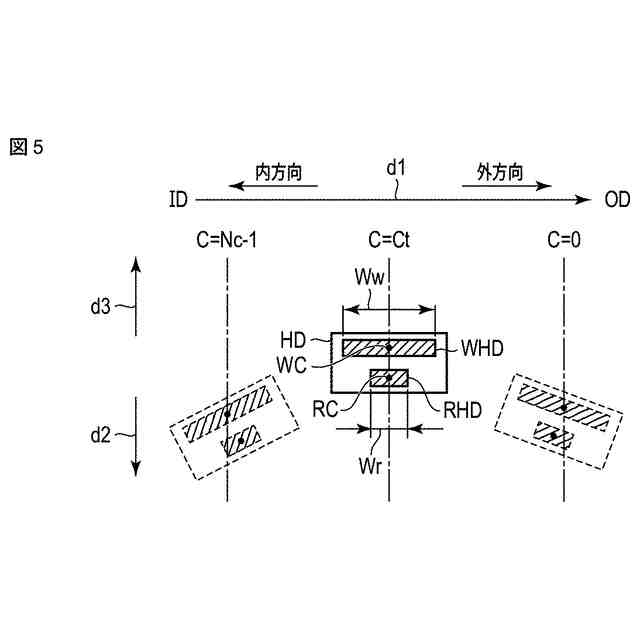
図5は、上記比較例において、ライトヘッドの重心及びリードヘッドの重心が円周方向に並んだ場合と、ヘッドを最内周トラックに対向させた場合と、ヘッドを最外周トラックに対向させた場合とにおいて、トラックに対するヘッドの幾何学的配置の一例を示す図である。
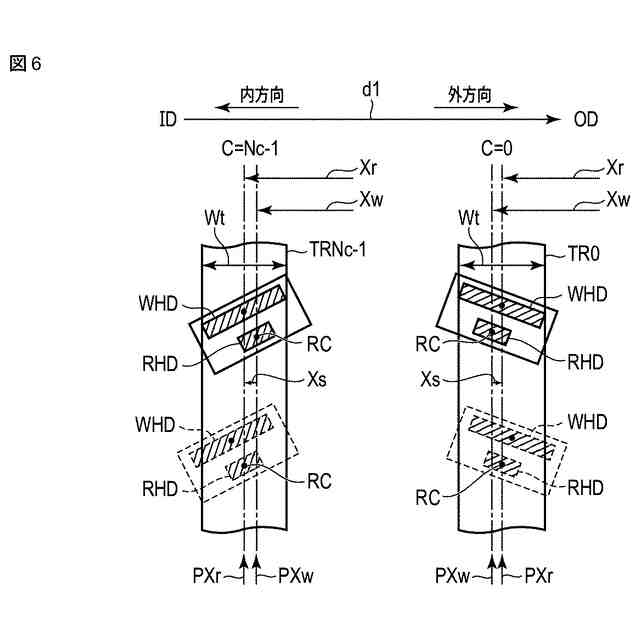
図6は、上記比較例において、ライト処理及びリード処理の際の最内周トラックとヘッドとの位置関係と、ライト処理及びリード処理の際の最外周トラックとヘッドとの位置関係と、示す図である。
図7は、上記比較例において、複数のトラックにおけるリードヘッドの位置の変化をグラフで示す図である。
図8は、上記比較例において、複数のトラックにおけるリードオフセットシフト量の変化をグラフで示す図である。
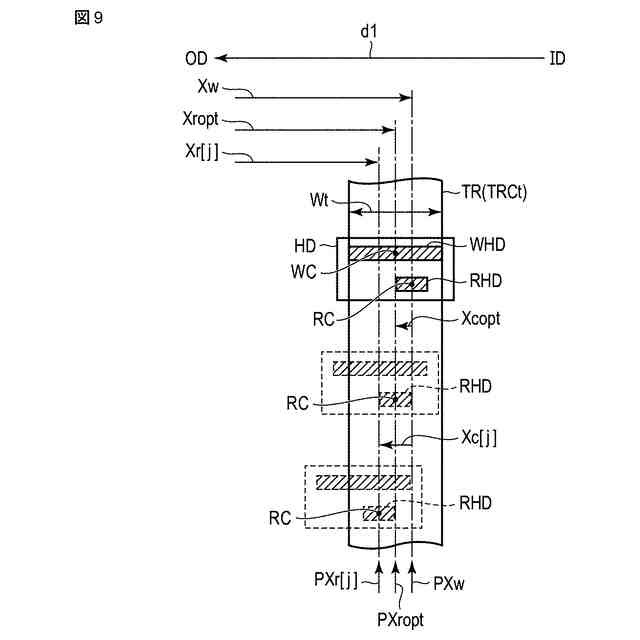
図9は、上記比較例において、リードオフセット補正量が互いに異なる3つの場合において、トラックとヘッドとの位置関係を示す図である。
図10は、上記比較例において、リードヘッドの半径位置に対するリードした信号の振幅の変化をグラフで示す図である。
図11は、上記比較例において、リードヘッドの半径位置に対するリードした信号のビットエラーレートの変化をグラフで示す図である。
図12は、上記比較例に係るヘッドの位置決め制御系の一例を示すブロック図である。
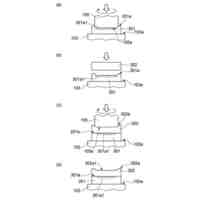
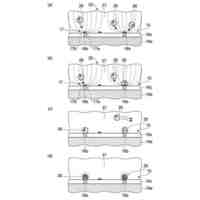
図13は、上記比較例において、上記リードオフセット補正量を変更しながらトラックのデータをリードする際のヘッドの動きを説明するための図であり、(a)最初の半径位置にリードヘッドを固定してトラックのデータをリードしている状態と、(b)2番目の半径位置にリードヘッドを移動させている状態と、(c)最初の半径位置から2番目の半径位置にリードヘッドを固定してトラックのデータをリードしている状態と、(d)2番目の半径位置から3番目の半径位置にリードヘッドを移動させている状態と、(e)最後の半径位置にリードヘッドを固定してトラックのデータをリードしている状態と、を示す図である。
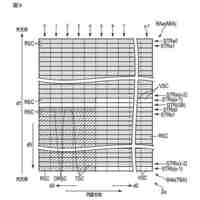
図14は、上記比較例において、対象のトラックに対してリード処理、シーク動作、及び待機動作を繰り返し行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標位置のセクタ番号の変化と、をそれぞれグラフで示す図である。
図15は、第1の実施形態に係る磁気ディスク装置の構成を示すブロック図である。
図16は、上記第1の実施形態において、上記リードオフセット補正量を変更しながらトラックのデータをリードする際のヘッドの動きを説明するための図であり、最初の半径位置から最後の半径位置までリードヘッドを移動させながらトラックのデータをリードしている状態を示す図である。
図17は、上記第1の実施形態において、対象のトラックに対してリード処理を行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標位置のセクタ番号の変化と、をそれぞれグラフで示す図である。
図18は、上記第1の実施形態に係るヘッドの位置決め制御系の一例を示すブロック図である。
図19は、上記第1の実施形態において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化をグラフで示す図であり、リードオフセット補正量を直線軌道で変化させた例を示す図である。
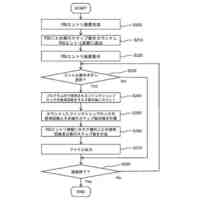
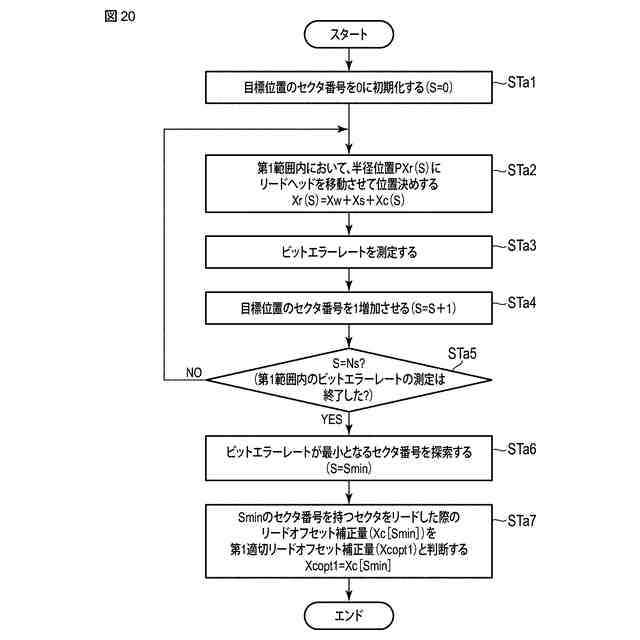
図20は、上記第1の実施形態の磁気ディスク装置に適用可能な第1適切リードオフセット補正量を探索する方法を説明するためのフロー図である。
図21は、上記第1の実施形態の変形例1において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化を3種類のグラフで示す図であり、リード開始位置を円周方向に3回ずらし、それぞれリードオフセット補正量を同一の直線軌道で変化させた例を示す図である。
図22は、上記第1の実施形態の上記変形例1において、対象のトラックに対してリード処理、シーク動作、及び待機動作を繰り返し行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標位置のセクタ番号の変化と、をそれぞれグラフで示す図である。
図23は、上記第1の実施形態の変形例2において、ディスクが1回転する期間に第1シーク方向にリードヘッドを直線軌道で移動させながら対象のトラックに対して行うリード処理と、ディスクが1回転する期間に第2シーク方向にリードヘッドを直線軌道で移動させながら対象のトラックに対して行うリード処理と、を繰り返し行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標位置のセクタ番号の変化と、をそれぞれグラフで示す図である。
図24は、上記第1の実施形態の変形例3において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化をグラフで示す図であり、ディスクが1回転する期間に、リードオフセット補正量を右上がりに直線軌道で変化させ、続けてリードオフセット補正量を右下がりに直線軌道で変化させた例を示す図である。
図25は、上記第1の実施形態の変形例4において、ディスクが1回転する期間に、第1シーク方向にリードヘッドを直線軌道で移動させながら対象のトラックに対して行うリード処理と、続けて第2シーク方向にリードヘッドを直線軌道で移動させながら対象のトラックに対して行うリード処理とを繰り返し行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標位置のセクタ番号の変化と、をそれぞれグラフで示す図である。
図26は、上記第1の実施形態の変形例5において、目標セクタの位置(半径位置)に対するリードオフセット補正量の変化をグラフで示す図であり、ディスクが1回転する期間に、リードオフセット補正量を右上がりに直線軌道で変化させ、続けてリードオフセット補正量を右下がりに直線軌道で変化させ、続けてリードオフセット補正量を右上がりに直線軌道で変化させ、続けてリードオフセット補正量を右下がりに直線軌道で変化させた例を示す図である。
図27は、上記第1の実施形態の変形例6において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化をグラフで示す図であり、リードオフセット補正量を正弦波状の軌道で変化させた例を示す図である。
図28は、上記第1の実施形態の変形例7において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化を3種類のグラフで示す図であり、3回リード開始位置を円周方向にずらし、それぞれリードオフセット補正量を同一の正弦波状の軌道で変化させた例を示す図である。
図29は、上記第1の実施形態の変形例8において、目標のセクタの位置(半径位置)に対するリードオフセット補正量の変化をグラフで示す図であり、ディスクが1回転する期間に、リードオフセット補正量を右上がりに正弦波状の軌道で変化させ、続けてリードオフセット補正量を右下がりに正弦波状の軌道で変化させた例を示す図である。
図30は、第2の実施形態に係る磁気ディスク装置において、対象のトラックに対してリード処理、シーク動作、及び待機動作を繰り返し行った場合の、ビットエラーレートの変化と、リードオフセット補正量の変化と、目標セクタの番号の変化と、をそれぞれグラフで示す図であり、第1範囲にてビットエラーレートを大まかに測定した後に、上記第1範囲より狭い第2範囲にてビットエラーレートを精密に測定する例を示す図である。
図31は、上記第2の実施形態の磁気ディスク装置に適用可能な第3適切リードオフセット補正量を探索する方法を説明するためのフロー図である。
図32は、図31に続く、上記方法を説明するためのフロー図である。
図33は、図32に続く、上記方法を説明するためのフロー図である。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら比較例及び各実施形態に係る磁気ディスク装置1及び適切リード位置(適切リードオフセット補正量)を探索する方法について詳細に説明する。
【0009】
(比較例)
まず、比較例に係る磁気ディスク装置1の構成について説明する。図1は、比較例に係る磁気ディスク装置1の構成を示すブロック図である。本比較例において、磁気ディスク装置1は、ハイブリッド記録型式の磁気ディスク装置である。但し、磁気ディスク装置1は、瓦記録型式の磁気ディスク装置又は通常記録型式の磁気ディスク装置であってもよい。
【0010】
図1に示すように、磁気ディスク装置1は、記録媒体としての複数、例えば、1~11枚のディスク(磁気ディスク)DKと、駆動モータとしてのスピンドルモータ(SPM)20と、ヘッドスタックアッセンブリ(以下、HSAと称する)22と、ドライバIC120と、ヘッドアンプ集積回路(以下、ヘッドアンプIC、又はプリアンプと称する)130と、揮発性メモリ70と、バッファメモリ(バッファ)80と、不揮発性メモリ90と、1チップの集積回路であるシステムコントローラ110とを備えている。また、磁気ディスク装置1は、ホストシステム(以下、単に、ホストと称する)100と接続される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
固定子
5日前
株式会社東芝
ドア構造
8日前
株式会社東芝
ラック装置
1日前
株式会社東芝
ディスク装置
12日前
株式会社東芝
ディスク装置
今日
株式会社東芝
電力変換装置
19日前
株式会社東芝
アイソレータ
今日
株式会社東芝
ディスク装置
15日前
株式会社東芝
開発支援装置
9日前
株式会社東芝
計測システム
14日前
株式会社東芝
差動伝送回路
1日前
株式会社東芝
異常検出装置
13日前
株式会社東芝
モータ制御装置
1日前
株式会社東芝
部材の接合方法
15日前
株式会社東芝
磁気ディスク装置
1日前
株式会社東芝
はしごの固定金具
5日前
株式会社東芝
回転電機のステータ
7日前
株式会社東芝
密度判定装置及びその方法
13日前
株式会社東芝
ウエーハ、及び、半導体装置
5日前
株式会社東芝
ハイブリッドサーボシステム
12日前
株式会社東芝
半導体装置及びその製造方法
1日前
株式会社東芝
ICモジュール、及びICカード
15日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
13日前
株式会社東芝
計測システム及び計測プログラム
14日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
13日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
13日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
13日前
株式会社東芝
通信装置、通信方法及びプログラム
5日前
株式会社東芝
通信装置、制御方法、及びプログラム
14日前
株式会社東芝
レーダシステム及びレーダ信号処理方法
2日前
株式会社東芝
模擬試験環境システム及び模擬試験方法
14日前
株式会社東芝
セラミックス回路基板およびその製造方法
今日
株式会社東芝
電解セルスタック及び電解装置の制御方法
7日前
株式会社東芝
情報処理装置、情報処理方法及びプログラム
6日前
株式会社東芝
異常要因推定システム、方法及びプログラム
6日前
株式会社東芝
核酸検出方法、核酸検出システム、及び基板
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ