TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025098849
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023215252
出願日
2023-12-20
発明の名称
ロボットおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
17/00 20060101AFI20250625BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】装置構成の簡素化、低コスト化を図りつつ動力伝達機構の過負荷を検出する検出方法、ロボットシステムおよびプログラムを提供すること。
【解決手段】基台と、基台に接続され、動力伝達機構を具備する関節部を有する複数のアームを含むロボットアームと、を備え、関節部の動力伝達機構は、遊星歯車式の第1減速機を有し、第1減速機よりも手先側の1つの関節部の動力伝達機構は、第1減速機よりも重量が軽いことを特徴とするロボット。
【選択図】図3
特許請求の範囲
【請求項1】
基台と、
前記基台に接続され、動力伝達機構を具備する関節部を有する複数のアームを含むロボットアームと、を備え、
前記関節部の前記動力伝達機構は、遊星歯車式の第1減速機を有し、
前記第1減速機よりも手先側の1つの前記関節部の前記動力伝達機構は、前記第1減速機よりも重量が軽いことを特徴とするロボット。
続きを表示(約 950 文字)
【請求項2】
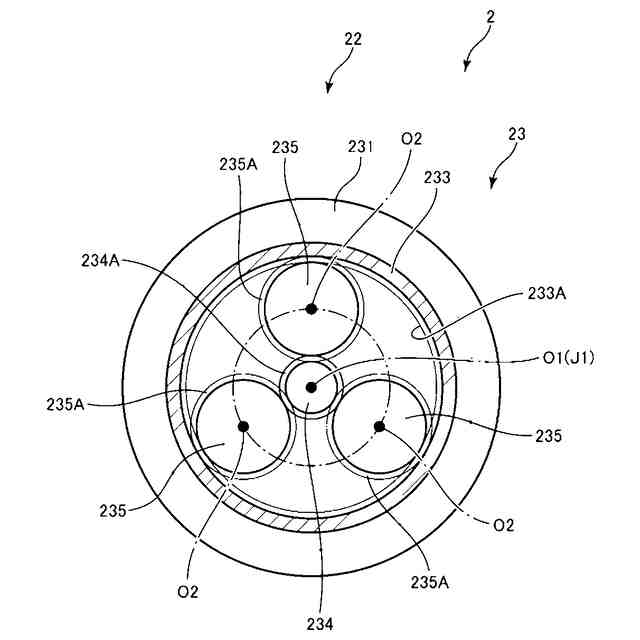
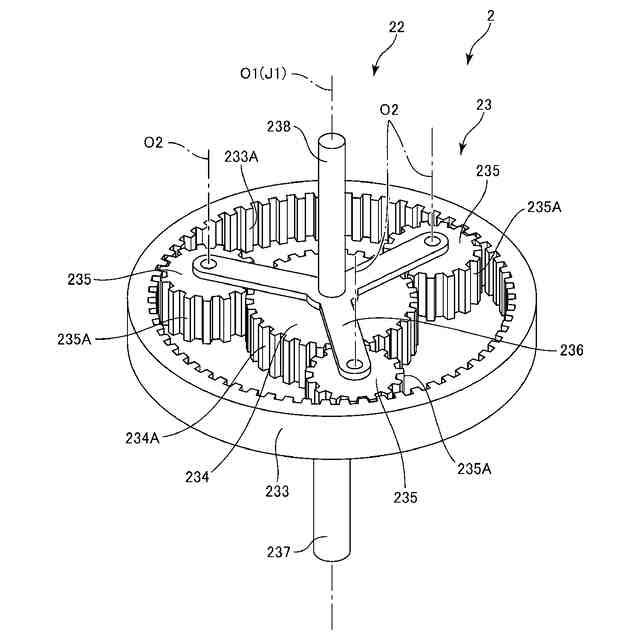
前記第1減速機は、リング状の内歯車と、前記内歯車の内側で、かつ前記内歯車と同心位置に配置された太陽歯車と、前記内歯車および前記太陽歯車の双方に噛み合う複数の遊星歯車と、前記各遊星歯車を回転可能に支持するキャリアとを備え、
前記内歯車は、前記遊星歯車よりも弾性が高い請求項1に記載のロボット。
【請求項3】
前記太陽歯車および前記複数の遊星歯車の歯車列は、1列設けられている請求項2に記載のロボット。
【請求項4】
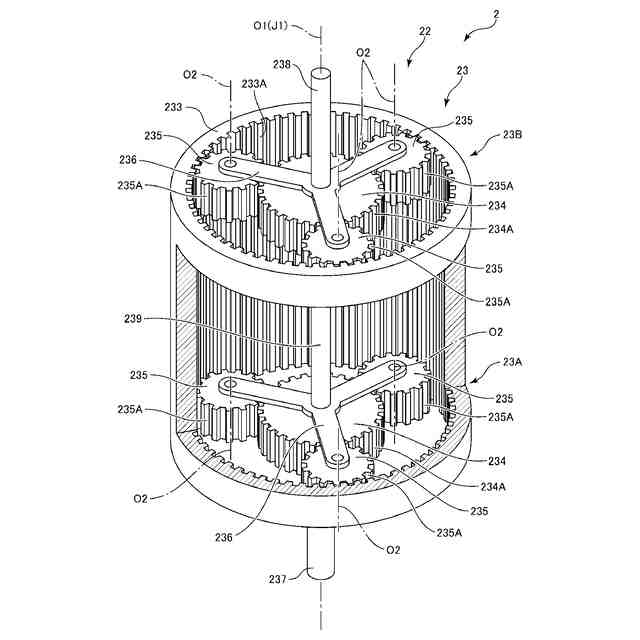
前記太陽歯車および前記複数の遊星歯車の歯車列は、前記内歯車の中心軸方向に沿って複数列設けられている請求項2に記載のロボット。
【請求項5】
前記内歯車、前記太陽歯車および前記遊星歯車は、それぞれはすば歯車である請求項2に記載のロボット。
【請求項6】
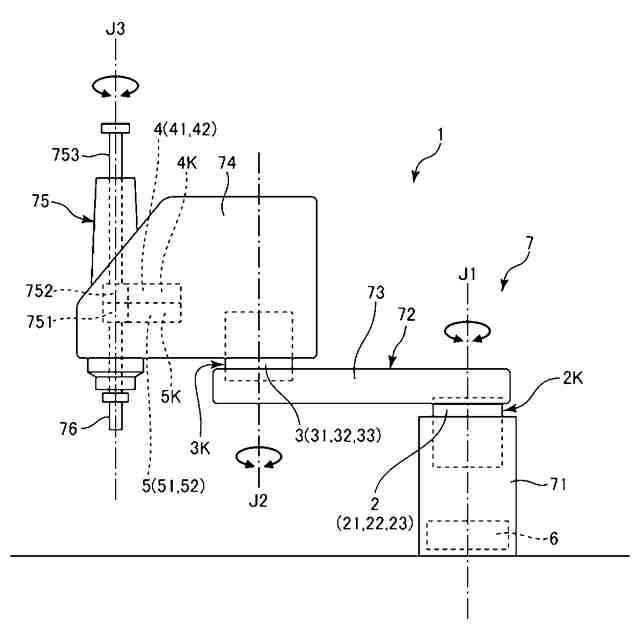
前記ロボットアームは、前記基台に対し、前記基台側から1番目の前記関節部である第1関節部を介して第1回転軸回りに回転可能に接続される第1アームと、前記第1アームに対し、前記基台側から2番目の前記関節部である第2関節部を介して前記第1回転軸と平行な第2回転軸回りに回転可能に接続される第2アームと、前記第2アームに対し、前記基台側から3番目の前記関節部である第3関節部を介して前記第1回転軸と平行な第3回転軸に沿って移動するシャフトと、を有し、
前記第2関節部の前記動力伝達機構は、前記第1減速機よりも重量が軽い遊星歯車式の第2減速機を有し、
前記第3関節部の前記動力伝達機構は、プーリーおよびベルトを有する請求項1ないし5のいずれか1項に記載のロボット。
【請求項7】
前記第1減速機の重量をG1とし、前記第2減速機の重量をG2としたとき、
G2/G1は、0.3以上0.9以下である請求項6に記載のロボット。
【請求項8】
請求項1に記載のロボットと、
前記ロボットが設置される架台と、
複数の作業対象物を順次搬送するコンベヤーと、を備え、
前記ロボットは、前記コンベヤーにより搬送される前記複数の作業対象物に対して連続して作業を行うことを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
複数のアームと、隣接するアーム同士を回転可能に接続する関節部とを備えるロボットアームを有し、このロボットアームを所望の姿勢となるように駆動してワークに対し作業を行うロボットが知られている。ロボットアームは、複数の関節部を有し、各関節部には、アームを回転駆動するための駆動部として、関節機構が設置されている。関節機構は、駆動源であるモーターと、モーターの回転速度を減速する減速機と、を有する。
【0003】
例えば特許文献1では、減速機として、遊星歯車式の減速機が用いられている。これにより、歯車間でのバックラッシを小さくすることができ、ロボットアームの位置精度を高めることができる。
【先行技術文献】
【特許文献】
【0004】
特開2009-222116号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、遊星歯車式の減速機は、重量が比較的重いため、例えば、ロボットアームの先端部に遊星歯車式の減速機を配置すると、ロボットアームの先端部の慣性重量(イナーシャ)が大きくなってしまう。この場合、ロボットアームが俊敏な動作を行うためには、各関節部が有するモーターへの通電量を多くする必要がある。特許文献1では、このような点について考慮されていないため、モーターへの通電量を抑制して低消費電力を図りつつ俊敏な動作を実現することができない。
【課題を解決するための手段】
【0006】
本発明のロボットは、基台と、
前記基台に接続され、動力伝達機構を具備する関節部を有する複数のアームを含むロボットアームと、を備え、
前記関節部の前記動力伝達機構は、遊星歯車式の第1減速機を有し、
前記第1減速機よりも手先側の1つの前記関節部の前記動力伝達機構は、前記第1減速機よりも重量が軽い。
【0007】
本発明のロボットシステムは、本発明のロボットと、
前記ロボットが設置される架台と、
複数の作業対象物を順次搬送するコンベヤーと、を備え、
前記ロボットは、前記コンベヤーにより搬送される前記複数の作業対象物に対して連続して作業を行う。
【図面の簡単な説明】
【0008】
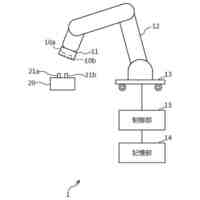
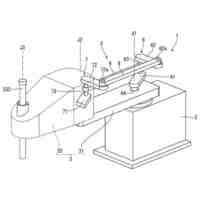
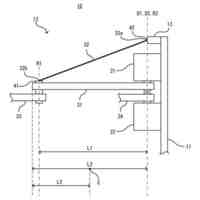
本発明の第1実施形態に係るロボットシステムの概略構成図である。
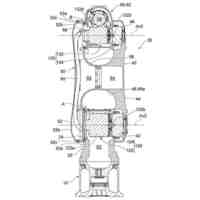
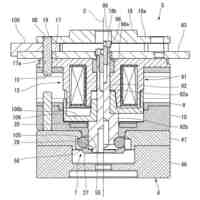
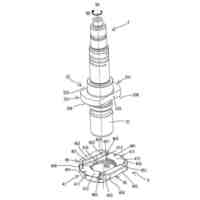
図1に示すロボットが備える第1減速機の横断面図である。
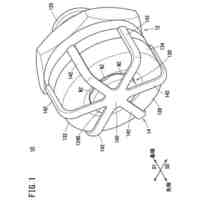
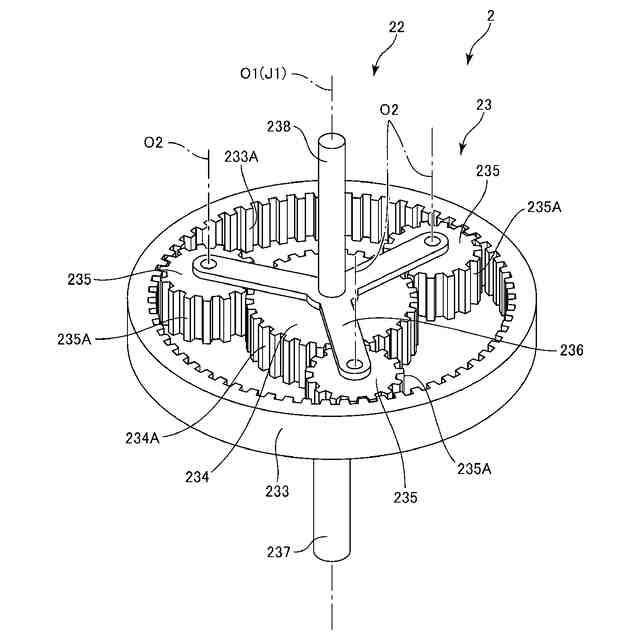
図2に示す第1減速機の内部構造を示す斜視図である。
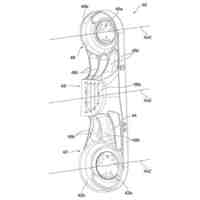
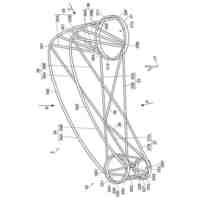
本発明の第2実施形態に係るロボットシステムのロボットが備える第1減速機の内部構造を示す斜視図である。
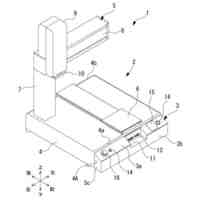
本発明の第3実施形態に係るロボットシステムの概略構成図である。
【発明を実施するための形態】
【0009】
以下、本発明のロボットおよびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0010】
<第1実施形態>
図1は、本発明の第1実施形態に係るロボットシステムの概略構成図である。図2は、図1に示すロボットが備える第1減速機の横断面図である。図3は、図2に示す第1減速機の内部構造を示す斜視図である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
11日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
今日
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
4日前
株式会社ダイヘン
搬送装置
4日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
住友重機械工業株式会社
支援装置
4日前
住友重機械工業株式会社
支援装置
4日前
ホシデン株式会社
分解用治具
4日前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
6日前
オークラ輸送機株式会社
ハンド装置
19日前
株式会社リコー
多関節ロボット
4日前
川崎重工業株式会社
ロボットシステム
20日前
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ジャノメ
ロボット
28日前
SMC株式会社
ベルヌーイグリッパ
今日
セイコーエプソン株式会社
ロボット
14日前
セイコーエプソン株式会社
ロボット
1か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
株式会社マキタ
回転工具
21日前
株式会社マキタ
電動工具
18日前
オムロン株式会社
ロボット
1か月前
個人
工具、工具セット、部材取外し方法
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ