TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101369
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218178
出願日
2023-12-25
発明の名称
プーリー機構、プーリー機構付きモータ、重量選別機、及び調整方法
出願人
アンリツ株式会社
代理人
弁理士法人栄光事務所
主分類
H02K
7/10 20060101AFI20250630BHJP(電力の発電,変換,配電)
要約
【課題】モータの振動を抑制できるプーリー機構、プーリー機構付きモータ、重量選別機、及び調整方法を提供する。
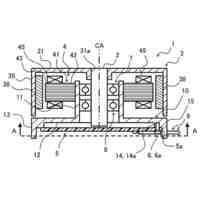
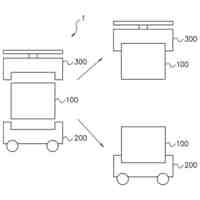
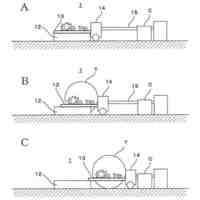
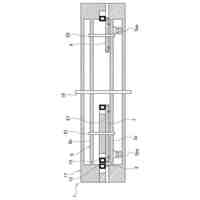
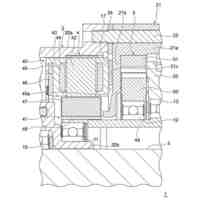
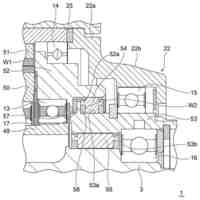
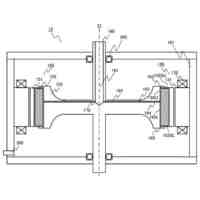
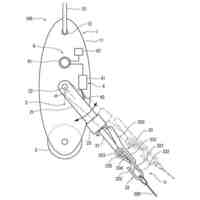
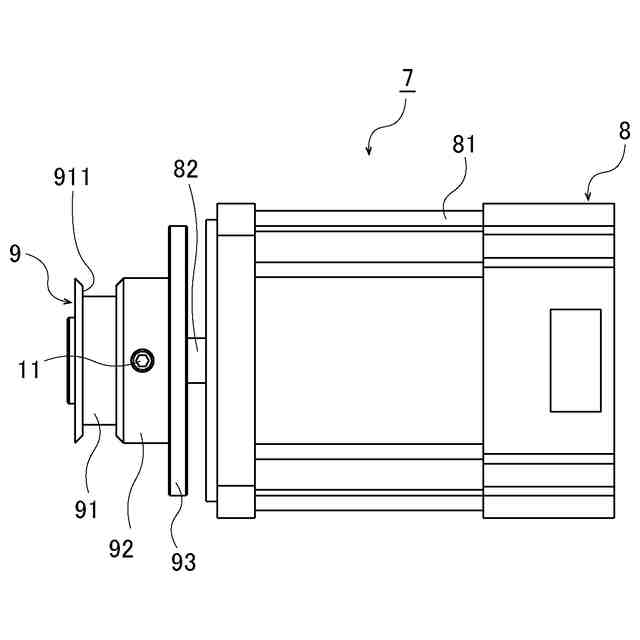
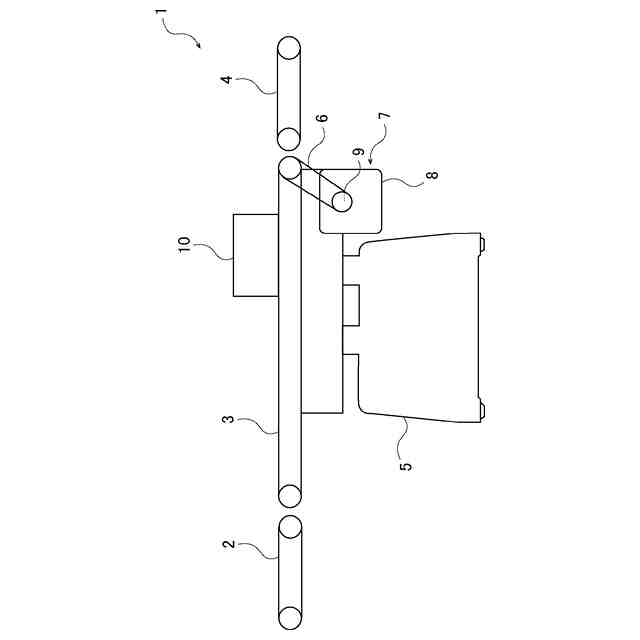
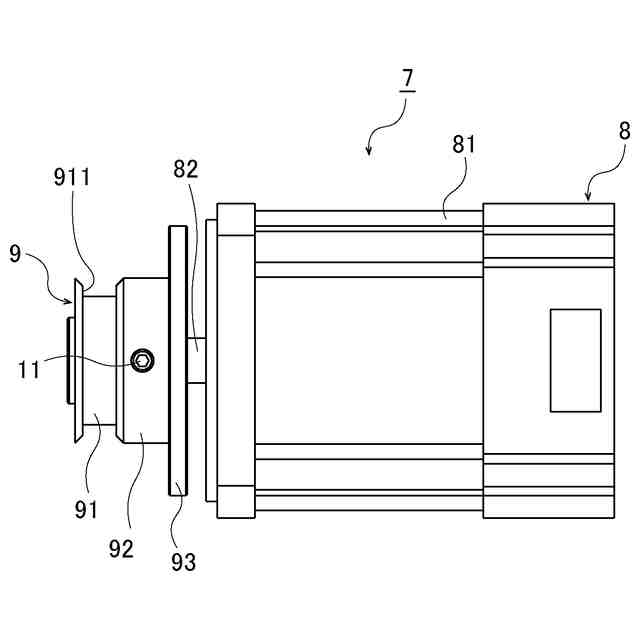
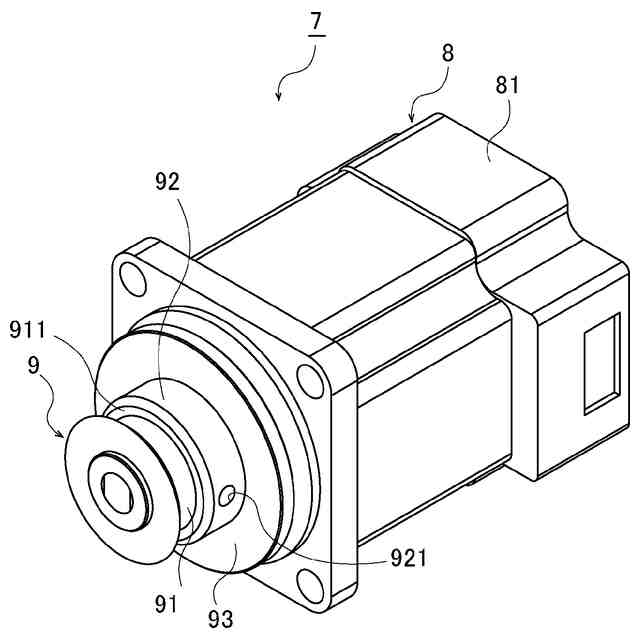
【解決手段】プーリー機構9は、秤量用ベルトコンベア3の駆動源となるモータ8の回転軸82に取り付けられる。プーリー機構9は、モータ8の駆動力を秤量用ベルトコンベア3に伝達する駆動ベルト6が取り付けられるプーリー本体91と、モータ8の回転中心と、プーリー機構9を取り付けたモータ8の重心と、のズレであるアンバランス量が調整可能な調整リング部93と、を備えている。
【選択図】図3
特許請求の範囲
【請求項1】
重量が計量される物品(10)を搬送する秤量用ベルトコンベア(3)の駆動源となるモータ(8)の回転軸(82)に取り付けられるプーリー機構(9)であって、
前記モータの駆動力を前記秤量用ベルトコンベアに伝達する駆動ベルト(6)が取り付けられるプーリー本体(91)と、
前記プーリー機構を取り付けた前記モータの重心位置が調整可能な調整部(93)と、を備えた、
プーリー機構。
続きを表示(約 870 文字)
【請求項2】
請求項1に記載のプーリー機構において、
前記調整部は、前記プーリー本体よりも前記モータ側に設けられた、
プーリー機構。
【請求項3】
請求項2に記載のプーリー機構において、
前記調整部は、前記プーリー本体よりも前記回転軸と交差する方向に突出するリング状に設けられた、
プーリー機構。
【請求項4】
請求項1に記載のプーリー機構において、
前記プーリー本体と前記調整部とが一体に設けられた、
プーリー機構。
【請求項5】
請求項1~4の何れか1項に記載のプーリー機構(9)と、
前記プーリー機構が回転軸(82)に取り付けられた、重量が計量される物品(10)を搬送する秤量用ベルトコンベアの駆動源となるモータ(8)と、を備えた、
プーリー機構付きモータ(7)。
【請求項6】
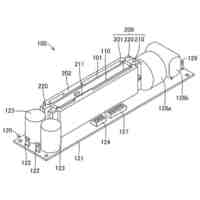
重量が計量される物品(10)を搬送する秤量用ベルトコンベア(3)と、
前記秤量用ベルトコンベアの駆動源となるモータ(8)と、
前記モータの回転軸に取り付けられる請求項1~4の何れか1項に記載のプーリー機構(9)と、
前記秤量用ベルトコンベアと前記プーリー機構とに取り付けられた駆動ベルト(6)と、
前記秤量用ベルトコンベアにより搬送される前記物品を計量する秤量部(5)と、を備えた
重量選別機。
【請求項7】
重量が計量される物品を搬送する秤量用ベルトコンベアの駆動源となるモータと、前記モータの回転軸に取り付けられる請求項1~4の何れか1項に記載のプーリー機構と、を備えたプーリー機構付きモータの回転中心と重心とのズレであるアンバランス量を調整する調整方法であって、
前記モータに前記プーリー機構を取り付ける工程と、
前記プーリー機構の前記調整部により重心位置を調整して、前記アンバランス量を調整する工程と、を備えた、
調整方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、プーリー機構、プーリー機構付きモータ、重量選別機、及び調整方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
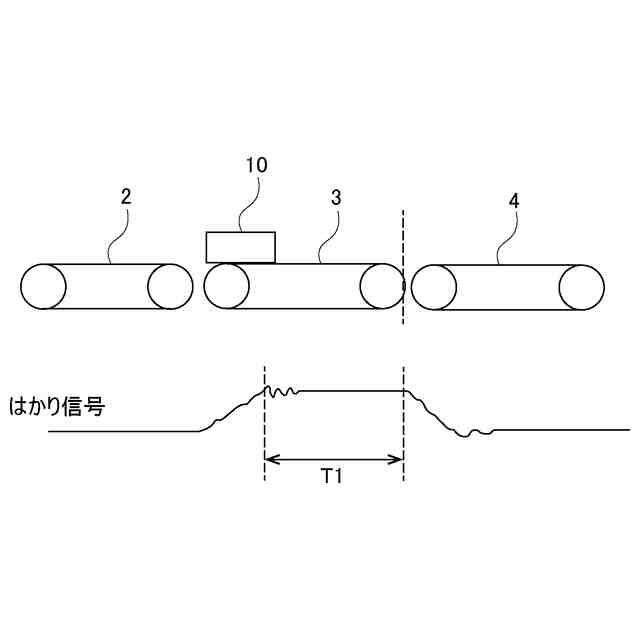
従来、秤量用ベルトコンベアで物品を搬送し、秤量用ベルトコンベアで搬送されている物品の重量を計量し、計量結果によって物品を選別する重量選別機が知られている。この重量選別機においては、モータにプーリー機構を取り付け、プーリー機構と秤量用ベルトコンベアとの間に駆動ベルトを取り付けて、モータの駆動力を秤量用ベルトコンベアに伝達している。
【0003】
上述した重量選別機においては、モータの回転中心と重心とにズレがあった場合、モータが振動してしまい、これにより精度よく物品を計量することができない。
【0004】
そこで、特許文献1のモータを上述した重量選別機に適用することが考えられる。特許文献1のモータは、モータの回転軸にバランスウエイトを取り付け、モータのアンバランス量を調整可能とするものである。しかしながら、モータはプーリー機構を取り付けると重心が変動してしまい、モータの回転中心と重心とに再びアンバランスが発生することがある。また、バランスウエイトでの調整が十分でないこともある。
【0005】
特許文献1のモータは、バランスウエイトがケース内に収容されており、プーリー機構を取り付け後にバランスウエイトを調整できるものではない。このため、依然、プーリー機構を取り付けたモータに振動が発生し、精度よく物品の質量を計量することができない、という課題があった。
【先行技術文献】
【特許文献】
【0006】
特開2019-110666号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、モータの振動を抑制できるプーリー機構、プーリー機構付きモータ、重量選別機、及び調整方法を提供することにある。
【課題を解決するための手段】
【0008】
前述した目的を達成するために、本発明に係るプーリー機構、プーリー機構付きモータ、重量選別機、及び調整方法は、下記[1]~[7]を特徴としている。
[1]
重量が計量される物品(10)を搬送する秤量用ベルトコンベア(3)の駆動源となるモータ(8)の回転軸(82)に取り付けられるプーリー機構(9)であって、
前記モータの駆動力を前記秤量用ベルトコンベアに伝達する駆動ベルト(6)が取り付けられるプーリー本体(91)と、
前記プーリー機構を取り付けた前記モータの重心位置が調整可能な調整部(93)と、を備えた、
プーリー機構であること。
【0009】
[2]
[1]に記載のプーリー機構において、
前記調整部は、前記プーリー本体よりも前記モータ側に設けられた、
プーリー機構であること。
【0010】
[3]
[2]に記載のプーリー機構において、
前記調整部は、前記プーリー本体よりも前記回転軸と交差する方向に突出するリング状に設けられた、
プーリー機構であること。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アンリツ株式会社
測定装置とその測定対象設定方法
2日前
アンリツ株式会社
測定装置とその測定対象設定方法
2日前
アンリツ株式会社
測定装置とその測定対象設定方法
2日前
アンリツ株式会社
シーケンスパターン発生装置とその送信開始タイミング制御方法
2日前
個人
充電制御システム
3日前
ニデック株式会社
モータ
17日前
個人
発電装置
11日前
株式会社ナユタ
電源装置
3日前
個人
電流制御形AC-DC電源
10日前
キヤノン株式会社
電源装置
11日前
個人
ステッピングモータ実習装置
24日前
スズキ株式会社
移動システム
3日前
サンデン株式会社
電力変換装置
18日前
トヨタ自動車株式会社
充電方法
1か月前
サンデン株式会社
電力変換装置
18日前
カヤバ株式会社
モータ制御装置
6日前
カヤバ株式会社
モータ制御装置
6日前
トヨタ自動車株式会社
駆動装置
13日前
株式会社ダイヘン
給電装置
4日前
ダイハツ工業株式会社
グロメット
2日前
個人
回転力発生装置
9日前
日産自動車株式会社
回転電機
13日前
ダイハツ工業株式会社
充電システム
12日前
新電元工業株式会社
充電装置
1か月前
トヨタ自動車株式会社
電池システム
16日前
ミツミ電機株式会社
電源回路
12日前
シャープ株式会社
冷蔵庫
18日前
株式会社デンソー
携帯機
2日前
住友金属鉱山株式会社
遮熱装置
1か月前
富士電機株式会社
電力変換装置
6日前
株式会社デンソー
電源装置
19日前
ミネベアミツミ株式会社
回転機器
24日前
ミネベアミツミ株式会社
回転機器
24日前
ミネベアミツミ株式会社
回転機器
24日前
株式会社日立製作所
回転電機
24日前
個人
延線補助具
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ