TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105236
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223654
出願日
2023-12-28
発明の名称
車両システム及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250703BHJP(信号)
要約
【課題】車両と対象物との接触リスクの判定結果の算出を迅速化させる。
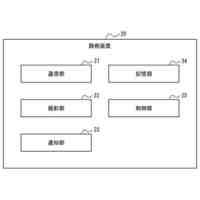
【解決手段】車両1と通信可能に接続されたサーバ装置20を備える車両システムSであって、サーバ装置は、車両の走行に関する演算を実行する演算部21を備え、演算部は、車両の周囲に存在すると共に、車両の走行に関連する対象物Gの検出値と、車両の走行に関連する走行情報とに基づいて、対象物と車両との将来的な位置関係を含む走行状態を算出し、走行状態に基づいて、車両に発生する将来的な対象物との接触リスクを判定し、接触リスクが所定の基準を超えると判定した場合、車両への運転支援を実行する、車両システムである。
【選択図】図1
特許請求の範囲
【請求項1】
車両と通信可能に接続されたサーバ装置を備える車両システムであって、
前記サーバ装置は、前記車両の走行に関する演算を実行する演算部を備え、
前記演算部は、
前記車両の周囲に存在すると共に、前記車両の走行に関連する対象物の検出値と、前記車両の走行に関連する走行情報とに基づいて、前記対象物と前記車両との将来的な位置関係を含む走行状態を算出し、
前記走行状態に基づいて、前記車両に発生する将来的な前記対象物との接触リスクを判定し、
前記接触リスクが所定の基準を超えると判定した場合、前記車両への運転支援を実行する、
車両システム。
続きを表示(約 670 文字)
【請求項2】
前記演算部は、
前記運転支援において、将来的に前記車両に前記対象物と所定距離以内に接近することを示す報知を前記車両に出力させる、
請求項1に記載の車両システム。
【請求項3】
前記演算部は、
前記接触リスクが所定の基準を超えると判定した場合、前記車両が乗員保護制御及び運転支援を開始する第1タイミングに比して早い第2タイミングにおいて前記車両に前記乗員保護制御及び運転支援を開始させる、
請求項1に記載の車両システム。
【請求項4】
前記演算部は、
前記運転支援において、前記接触リスクを低減させるように前記車両に減速制御及び/又は操舵制御を実行させる、
請求項1に記載の車両システム。
【請求項5】
車両と通信可能に接続されたサーバ装置を備える車両システムに適用されるコンピュータに前記車両の運転支援をさせる処理を実行させるプログラムであって、
前記コンピュータに前記車両の周囲に存在すると共に、前記車両の走行に関連する対象物の検出値と前記車両の走行に関連する走行情報とを取得させ、
前記検出値と前記走行情報とに基づいて、前記対象物と前記車両の将来的な位置関係を含む走行状態を算出させ、
前記走行状態に基づいて前記車両に発生する将来的な前記対象物との接触リスクを判定させ、
前記接触リスクが所定の基準を超えると判定された場合、前記車両への前記運転支援を実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の走行中のリスクを低減する車両システム及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、車両と対象物との接触のリスクを低減させる車両システムが記載されている。特許文献1に記載された車両システムによれば、車両の周囲の監視結果に基づいて、車両と対象物との接触のリスクが所定以上である場合に乗員保護装置を動作させ、或いは回避制御を実行している。
【先行技術文献】
【特許文献】
【0003】
特開2023-108224号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された車両システムによれば、車両の周囲の監視結果に基づいて車両と対象物との接触のリスクを判定しているため、接触のリスクが極めて高い場合、乗員保護装置を動作させると、乗員に負担となる可能性があった。
【0005】
本発明は、車両と対象物との接触リスクの判定結果の算出を迅速化することができる車両システム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、車両と通信可能に接続されたサーバ装置を備える車両システムであって、前記サーバ装置は、前記車両の走行に関する演算を実行する演算部を備え、前記演算部は、前記車両の周囲に存在すると共に、前記車両の走行に関連する対象物の検出値と、前記車両の走行に関連する走行情報とに基づいて、前記対象物と前記車両との将来的な位置関係を含む走行状態を算出し、前記走行状態に基づいて、前記車両に発生する将来的な前記対象物との接触リスクを判定し、前記接触リスクが所定の基準を超えると判定した場合、前記車両への運転支援を実行する、車両システムである。
【発明の効果】
【0007】
本発明によれば、車両と対象物との接触リスクの判定結果の算出を迅速化することができる。
【図面の簡単な説明】
【0008】
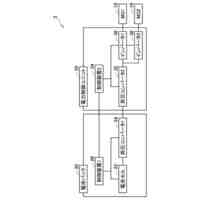
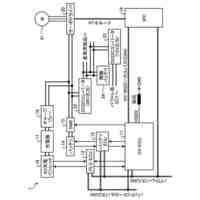
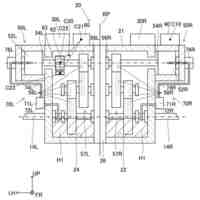
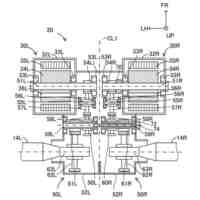
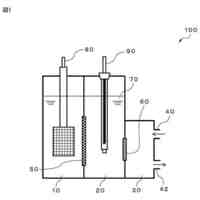
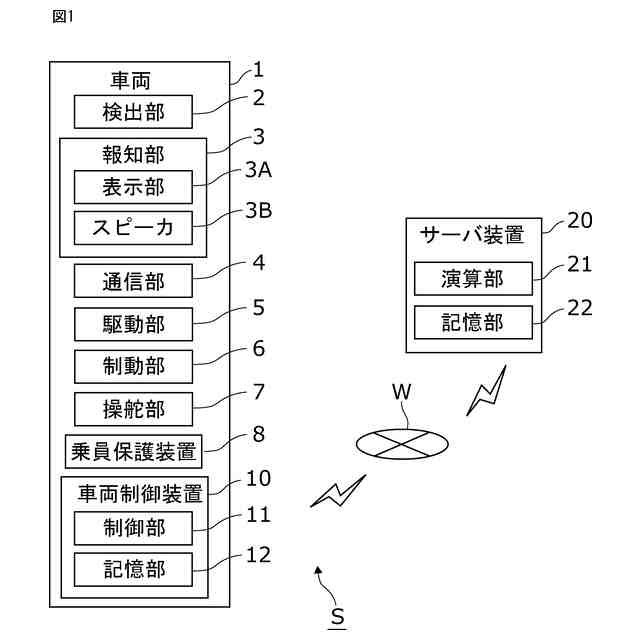
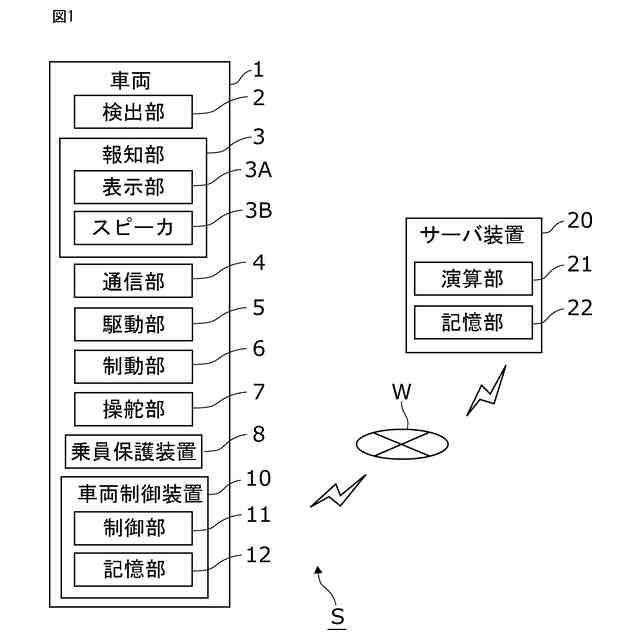
本発明の実施形態に係る車両システムの構成を示す図である。
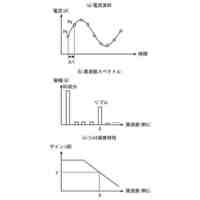
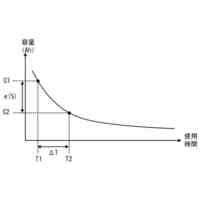
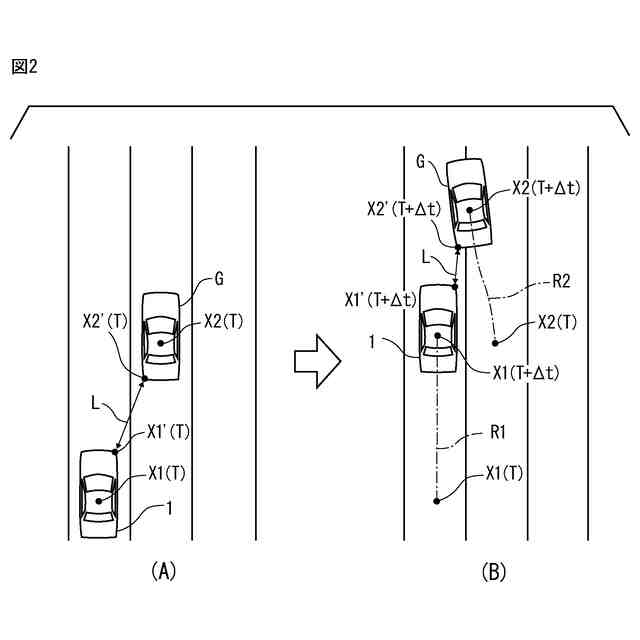
車両と対象物との将来的な走行状態を示す図である。
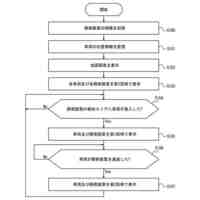
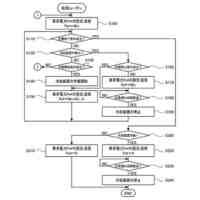
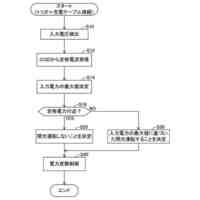
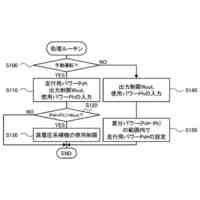
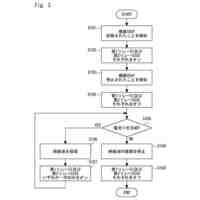
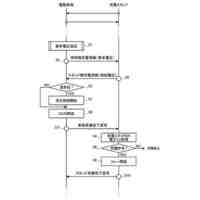
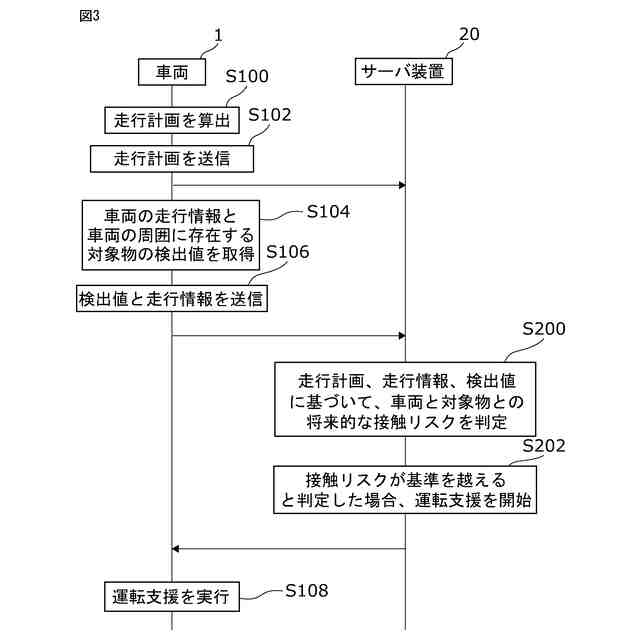
車両システムにおいて実行される車両制御方法の処理の流れを示すシーケンス図である。
【発明を実施するための形態】
【0009】
図1に示されるように、車両システムSは、車両1と、車両1と通信可能に接続されたサーバ装置20とにより構成されている。サーバ装置20は、車両1から取得したデータに基づいて車両1の走行に関する演算を実行し、車両1に演算結果を送信する。車両1は、演算結果に基づいて、乗員保護に関する処理を開始すると共に、運転支援に関する処理を開始する。
【0010】
車両1は、ネットワークWと接続する通信部4を備え、通信部4を介してサーバ装置20と通信する。通信部4は、例えば、無線通信インタフェースである。車両1は、各種センサにより構成された検出部2を備えている。検出部2は、車両1の走行に関する検出値を取得する。検出部2は、例えば、車両1の周囲の環境を撮像するカメラ装置を備えている。カメラ装置は、1つ以上のカメラセンサを備え、車両1の周囲の環境を撮像した撮像画像を取得する。撮像画像は、動画や静止画を含む。撮像画像は、後述の記憶部12に記憶される。撮像画像のデータは、定期的に更新されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
11日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
充電器
11日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
充電器
8日前
トヨタ自動車株式会社
移動体
10日前
トヨタ自動車株式会社
電動車
11日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
燃料電池
8日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
路側装置
8日前
トヨタ自動車株式会社
充電方法
8日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
コネクタ
10日前
トヨタ自動車株式会社
接続構造
15日前
トヨタ自動車株式会社
電源装置
10日前
トヨタ自動車株式会社
駆動装置
11日前
トヨタ自動車株式会社
電極触媒
9日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
制御装置
11日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
電池パック
9日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池パック
9日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池パック
9日前
トヨタ自動車株式会社
端子接続構造
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ