TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112104
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006194
出願日
2024-01-18
発明の名称
ロボット制御システム
出願人
清水建設株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/435 20240101AFI20250724BHJP(制御;調整)
要約
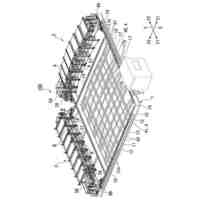
【課題】乗りかご内における自走式ロボットのロボット乗車エリアに空きがあるか否かを確実に判定することができるロボット制御システムを提供する。
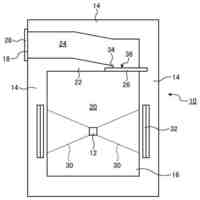
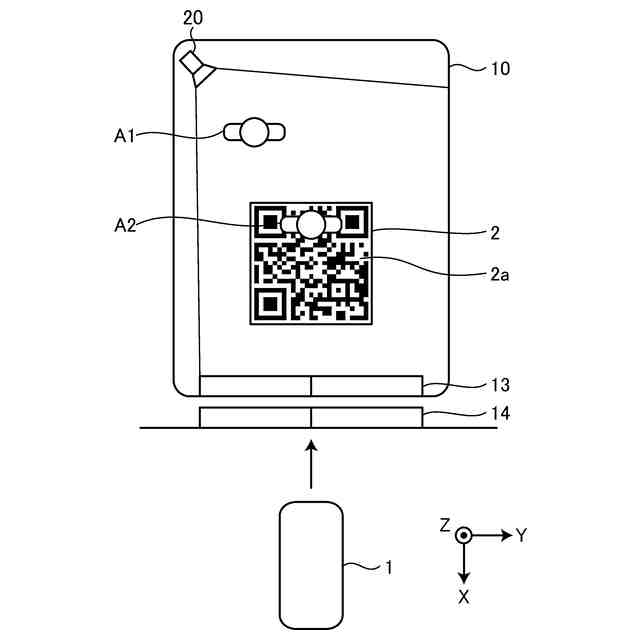
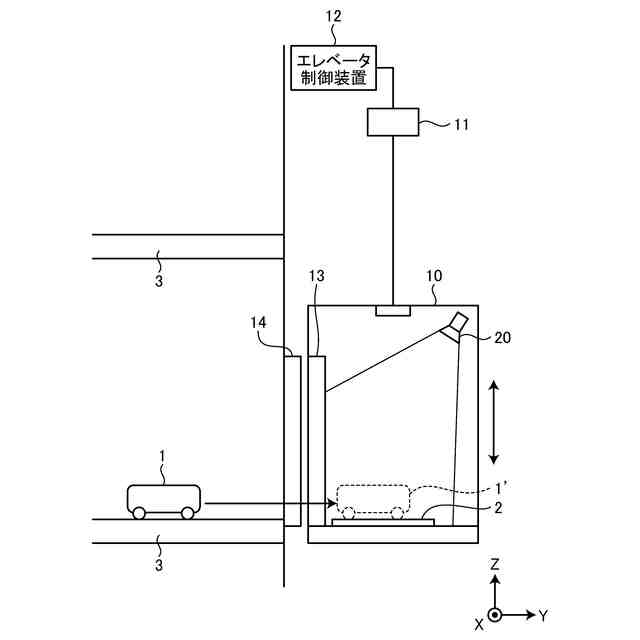
【解決手段】乗りかご10内のロボット乗車エリア2の全面に乗りかご10を特定する図形化コード2aを表示しておき、自走式ロボット1はロボット動作制御装置に乗車要求を送信し、乗りかご10内に設置された撮像装置20は、図形化コード2aを撮像し、撮像した動画情報をロボット動作制御装置に送信し、ロボット動作制御装置は、自走式ロボット1から乗車要求を受け付けた場合、乗りかご10の動画情報をもとに、図形化コード2aの読取に成功した乗りかごがあるか否かを判定し、図形化コード2aの読取に成功した乗りかごがある場合、乗車可能な乗りかごを自走式ロボット1に通知する。
【選択図】図2
特許請求の範囲
【請求項1】
自走式ロボットの乗車エリアが設けられたエレベータの乗りかご内に前記自走式ロボットが乗車エリアであるロボット乗車エリアに乗車可能か否かを判定して前記自走式ロボットに乗車許可の通知を行うロボット動作制御装置を有したロボット制御システムであって、
前記乗りかご内のロボット乗車エリアの全面に該乗りかごを特定する図形化コードを表示しておき、
前記自走式ロボットは前記ロボット動作制御装置に乗車要求を送信し、
前記乗りかご内に設置された撮像装置は、前記図形化コードを撮像し、撮像した動画情報を前記ロボット動作制御装置に送信し、
前記ロボット動作制御装置は、前記自走式ロボットから乗車要求を受け付けた場合、乗りかごの動画情報をもとに、前記図形化コードの読取に成功した乗りかごがあるか否かを判定し、前記図形化コードの読取に成功した乗りかごがある場合、乗車可能な乗りかごを前記自走式ロボットに通知することを特徴とするロボット制御システム。
続きを表示(約 180 文字)
【請求項2】
前記自走式ロボットは、乗車可能な乗りかごの通知を受けた場合、乗車する乗りかごを前記ロボット動作制御装置に通知し、
前記ロボット動作制御装置は、通知された乗りかごの動画情報をもとに降車が終了したか否かを判定し、降車が終了した場合、前記自走式ロボットに乗車許可の通知を行うことを特徴とする請求項1に記載のロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、乗りかご内における自走式ロボットのロボット乗車エリアに空きがあるか否かを確実に判定することができるロボット制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、人間の生活空間内を移動しながら、物の運搬、清掃、案内などの業務を行う自律移動装置、いわゆる人間共生型の自走式ロボットの開発が進んでいる。この自走式ロボットは、自律走行技術により自らエレベータに乗り込むことができる。そして、この自走式ロボットとエレベータとを連携したエレベータシステムにおいて、自走式ロボットと人間がエレベータを安全かつ効率よく利用できるようにするため、乗りかご内の空き領域を検出する空き領域検出手段によって検出された空き領域の大きさ及び位置の情報を基に、自走式ロボットが乗りかご内に乗り込み可能か否かを判定し、乗り込み可能と判定したときのみ自走式ロボットが乗りかご内に乗り込むようにしたエレベータシステムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-17184号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、特許文献1の空き領域検出手段が検出する空き領域(ロボット乗車エリア)は自走式ロボットと人間とが共用する領域であり、このロボット乗車エリアが空きであるか否かの判定は時間の経過とともに随時変化する。
【0005】
ここで、乗車エリアが確保できるか否かの判定手段として、乗車エリアに色を付け、この色の領域を画像認識することが考えられる。乗車エリアに人が居る場合に人の服装などにより乗車エリアの平均色が変化するため、色の検出による乗車エリアの空き判定にはバラツキが生じる。
【0006】
本発明は、上記に鑑みてなされたものであって、乗りかご内における自走式ロボットのロボット乗車エリアに空きがあるか否かを確実に判定することができる
ロボット制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明は、走式ロボットの乗車エリアが設けられたエレベータの乗りかご内に前記自走式ロボットが乗車エリアであるロボット乗車エリアに乗車可能か否かを判定して前記自走式ロボットに乗車許可の通知を行うロボット動作制御装置を有したロボット制御システムであって、前記乗りかご内のロボット乗車エリアの全面に該乗りかごを特定する図形化コードを表示しておき、前記自走式ロボットは前記ロボット動作制御装置に乗車要求を送信し、前記乗りかご内に設置された撮像装置は、前記図形化コードを撮像し、撮像した動画情報を前記ロボット動作制御装置に送信し、前記ロボット動作制御装置は、前記自走式ロボットから乗車要求を受け付けた場合、乗りかごの動画情報をもとに、前記図形化コードの読取に成功した乗りかごがあるか否かを判定し、前記図形化コードの読取に成功した乗りかごがある場合、乗車可能な乗りかごを前記自走式ロボットに通知することを特徴とする。
【0008】
また、本発明は、上記の発明において、前記自走式ロボットは、乗車可能な乗りかごの通知を受けた場合、乗車する乗りかごを前記ロボット動作制御装置に通知し、前記ロボット動作制御装置は、通知された乗りかごの動画情報をもとに降車が終了したか否かを判定し、降車が終了した場合、前記自走式ロボットに乗車許可の通知を行うことを特徴とする。
【発明の効果】
【0009】
本発明によれば、乗りかご内における自走式ロボットのロボット乗車エリアに空きがあるか否かを確実に判定することができる。
【図面の簡単な説明】
【0010】
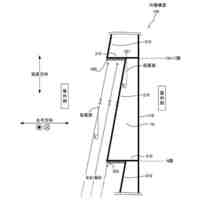
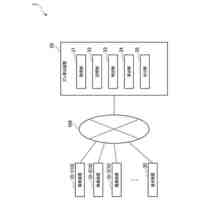
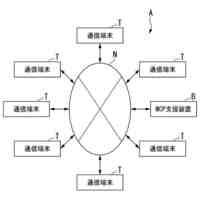
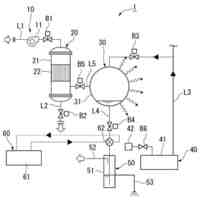
図1は、本実施の形態であるロボット制御システムの概念を示す模式図である。
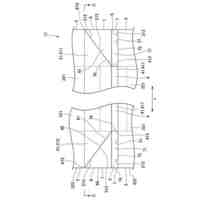
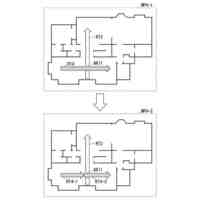
図2は、図1に示した乗りかごの平断面図である。
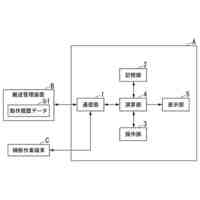
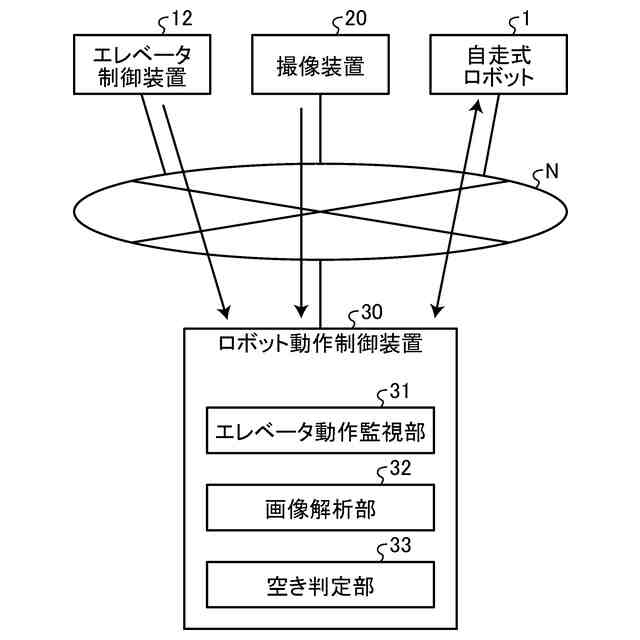
図3は、ロボット制御システムの構成を示すブロック図である。
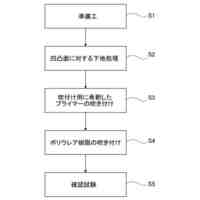
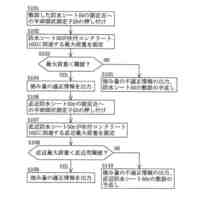
図4は、ロボット動作制御装置による自走式ロボットの乗車可否判定処理手順を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
清水建設株式会社
外壁構造
20日前
清水建設株式会社
配筋装置
3日前
清水建設株式会社
制振装置
2か月前
清水建設株式会社
化粧カバー
2日前
清水建設株式会社
鉄筋把持装置
3日前
清水建設株式会社
情報処理装置
9日前
清水建設株式会社
塔体の切断装置
1か月前
清水建設株式会社
製炭炉、製炭方法
2日前
清水建設株式会社
機械排煙システム
2か月前
清水建設株式会社
導電線の回収方法
1か月前
清水建設株式会社
配筋高さ調整機構
3日前
清水建設株式会社
汚染拡散防止構造
27日前
清水建設株式会社
配筋の千鳥調整機構
3日前
清水建設株式会社
加熱井戸の設置方法
27日前
清水建設株式会社
ロボット制御システム
1か月前
清水建設株式会社
ブラインド制御システム
2か月前
清水建設株式会社
コンクリートの施工方法
10日前
清水建設株式会社
放射線遮蔽構造およびその施工方法
1か月前
清水建設株式会社
ソイルセメントおよびその製造方法
1か月前
清水建設株式会社
再エネ制御システム、再エネ制御方法
1か月前
清水建設株式会社
補修箇所抽出装置及び補修箇所抽出方法
2か月前
清水建設株式会社
低透水層の施工方法および低透水層構造
10日前
清水建設株式会社
ズレ算出装置、施工方法及びズレ算出方法
1か月前
清水建設株式会社
角部用タブおよび四面ボックスの溶接方法
26日前
清水建設株式会社
木質耐火被覆鉄骨部材およびその施工方法
11日前
清水建設株式会社
出力精度確認システム及び出力精度確認方法
1か月前
清水建設株式会社
事業継続支援装置及び事業継続支援システム
1か月前
清水建設株式会社
建築物内圧制御システム及び建築物内圧制御方法
2か月前
清水建設株式会社
床版割付装置、床版割付方法、およびプログラム
1か月前
清水建設株式会社
ガス回収装置、ビル空調システム、ガス回収方法
20日前
公益財団法人鉄道総合技術研究所
樹脂吹付け方法
9日前
清水建設株式会社
病院
1か月前
清水建設株式会社
トンネル防水シートの施工管理装置及び施工管理方法
25日前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
1か月前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
1か月前
清水建設株式会社
作業板の取付治具、作業板の設置方法及び作業板の安全設備
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ