TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113788
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024008118
出願日
2024-01-23
発明の名称
無人搬送車および無人搬送車の制御方法
出願人
個人
,
鈴木製機株式会社
代理人
個人
,
個人
主分類
G05D
1/244 20240101AFI20250728BHJP(制御;調整)
要約
【課題】カゴ台車の下に適切に潜り込ませることができる無人搬送車を提供する。
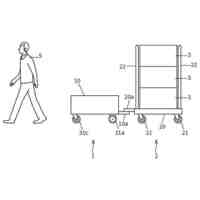
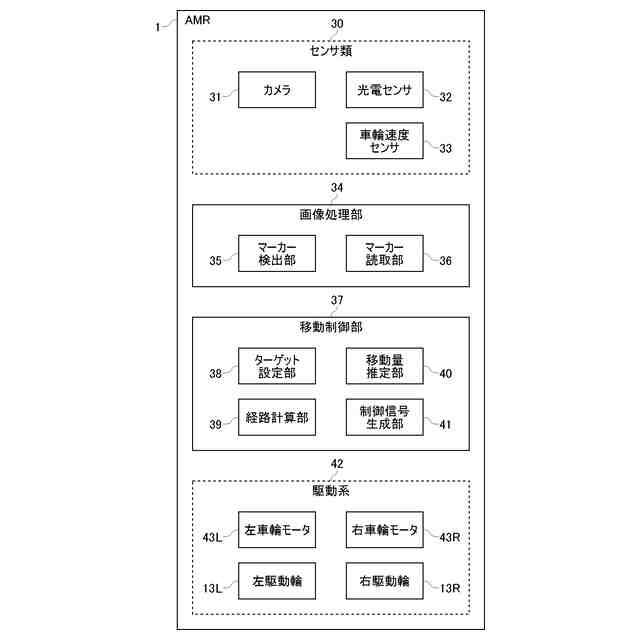
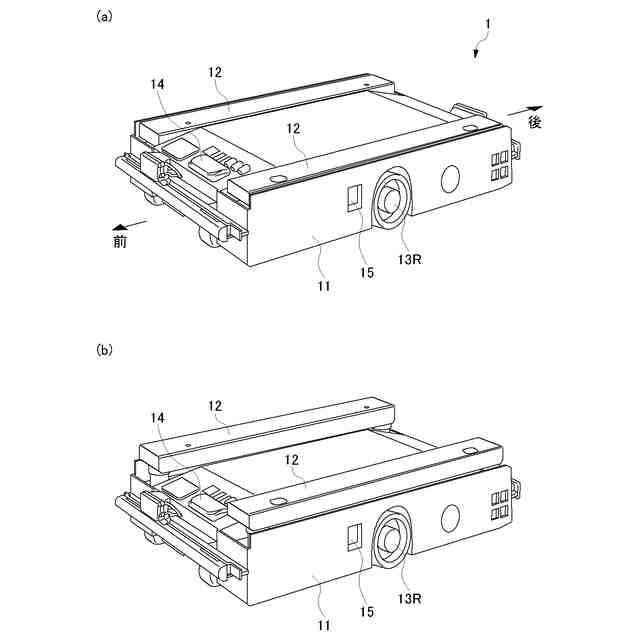
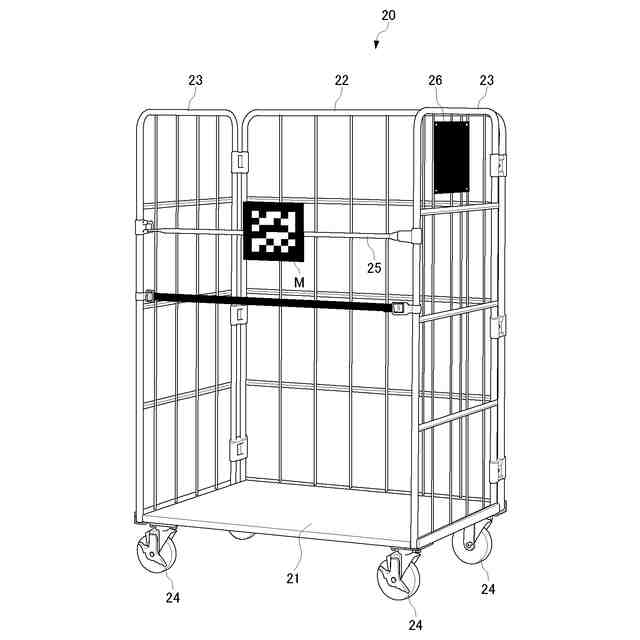
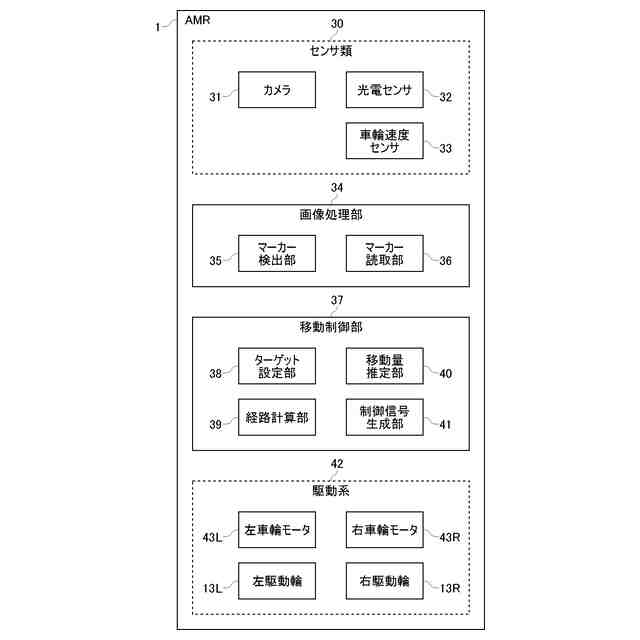
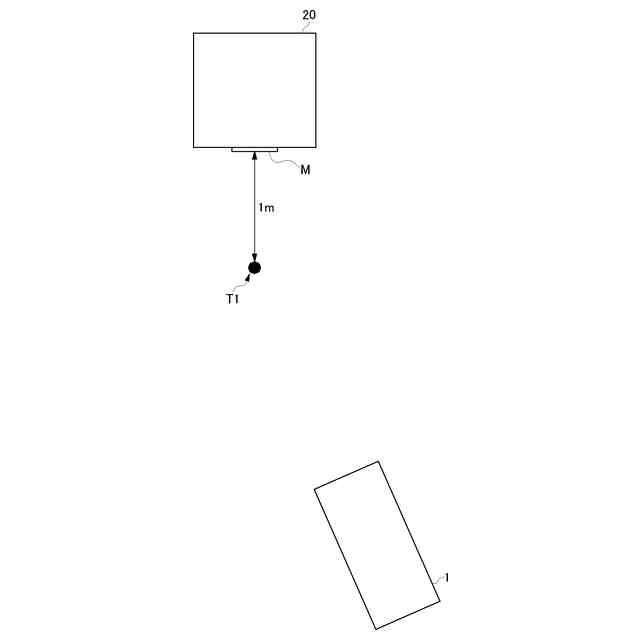
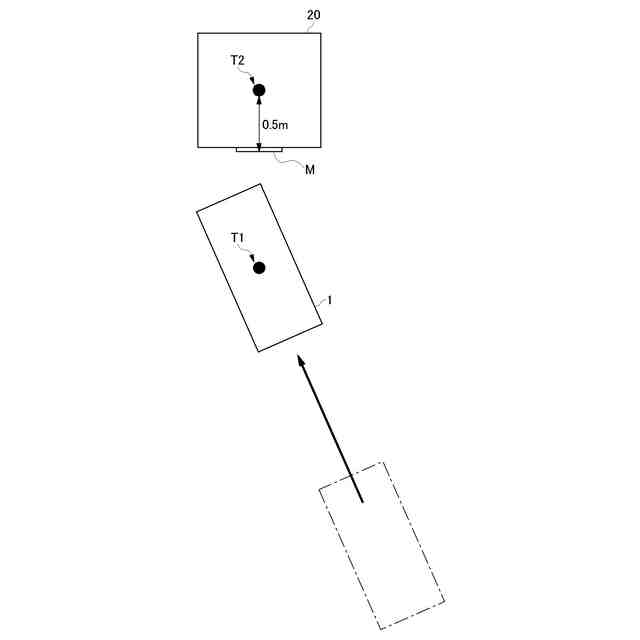
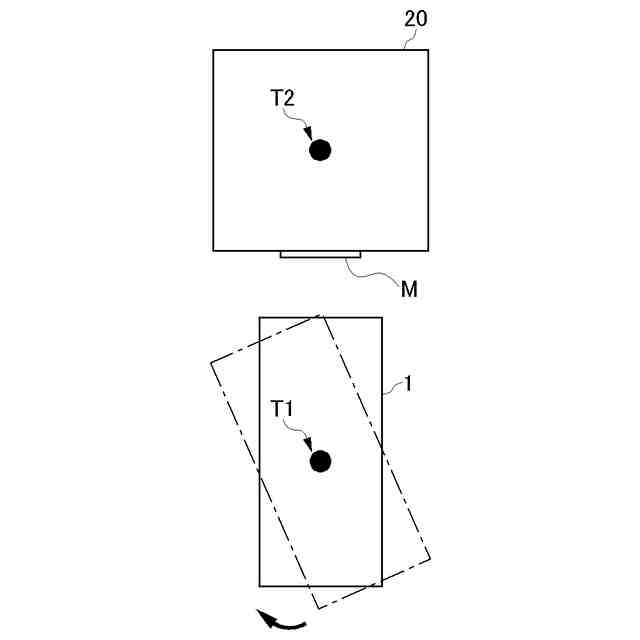
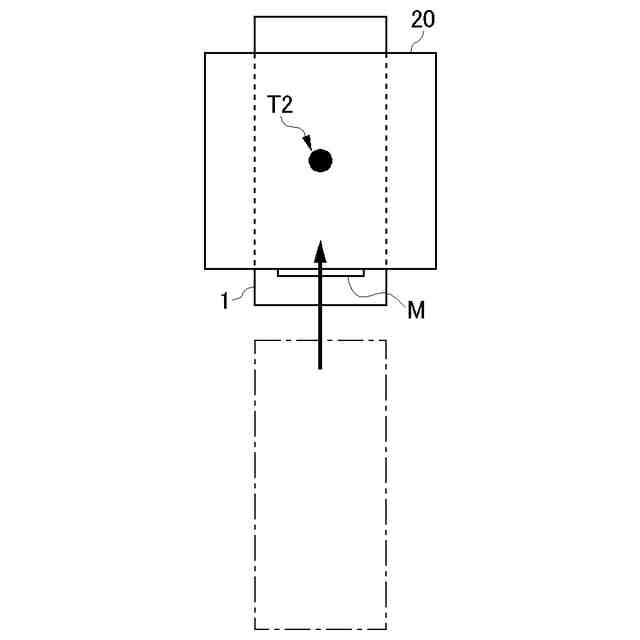
【解決手段】カゴ台車の下に潜り込んでカゴ台車を持ち上げてまたは牽引して搬送するAMR1である。AMR1の周辺を撮影するカメラ31と、カメラ31にて撮影されたカメラ31画像からカゴ台車に付されたARマーカーを検出し、検出したARマーカーを読み取るマーカー読取部36と、AMR1の移動を制御する移動制御部37とを備え、移動制御部37は、ARマーカーの位置に基づいて、カゴ台車の前に第1のターゲットを設定し、第1のターゲットの位置にAMR1を移動させる制御を行い、第1のターゲットの位置に到着したときに再度ARマーカーを読み取り、ARマーカーの位置に基づいて、カゴ台車の下に第2のターゲットを設定し、第2のターゲットの位置にAMR1を移動させる制御を行う構成を有する。
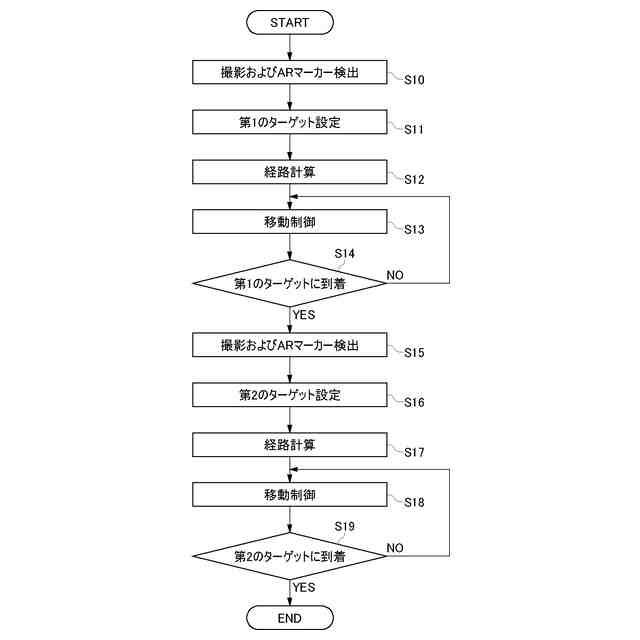
【選択図】図4
特許請求の範囲
【請求項1】
被搬送物の下に潜り込んで前記被搬送物を持ち上げてまたは牽引して搬送する無人搬送車であって、
前記無人搬送車の周辺を撮影する光学的読取装置と、
前記光学的読取装置にて撮影された画像から前記被搬送物に付されたマーカーを検出し、検出したマーカーを読み取るマーカー読取部と、
無人搬送車の移動を制御する移動制御部と、
を備え、
前記移動制御部は、前記マーカーの位置に基づいて、前記被搬送物の前にターゲットを設定し、前記ターゲットの位置に前記無人搬送車を移動させる制御を行い、
前記ターゲットの位置に到着したときに再度前記マーカーを読み取り、前記マーカーから読み取った情報に基づいて前記無人搬送車を前記被搬送物の下に移動させる制御を行う、無人搬送車。
続きを表示(約 1,300 文字)
【請求項2】
前記移動制御部は、前記ターゲットの位置に到着したときに再度前記マーカーを読み取り、前記マーカーの位置に基づいて、前記被搬送物の下に第2のターゲットを設定し、前記第2のターゲットの位置に前記無人搬送車を移動させる制御を行う、請求項1に記載の無人搬送車。
【請求項3】
前記マーカーは、前記被搬送物に対して前記マーカーが付された位置を示すデータを含み、
前記移動制御部は、前記画像から検出されたマーカーの位置と、前記マーカーが貼られた位置を示すデータとに基づいて、前記被搬送物の位置および向きを特定し、前記被搬送物の前に前記ターゲットを設定する、請求項1に記載の無人搬送車。
【請求項4】
前記マーカーは、前記被搬送物の寸法を示すデータを含み、
前記移動制御部は、前記被搬送物の寸法を示すデータに基づいて、前記被搬送物の下に前記第2のターゲットを設定する、請求項2に記載の無人搬送車。
【請求項5】
前記マーカーは、前記被搬送物の重量を示すデータを含み、
前記移動制御部は、前記重量を示すデータに基づいて最高速度を設定する請求項1に記載の無人搬送車。
【請求項6】
前記無人搬送車の前端および後端に、上方にある物体を検知する物体検知センサを備え、
前記移動制御部が前記無人搬送車を前記被搬送物の下に移動させるときに、前記物体検知センサが物体を検知しないことを確認した上で前記無人搬送車を停止させる、請求項1に記載の無人搬送車。
【請求項7】
前記マーカーは、前記マーカーを特定するマーカーIDのデータを含み、
前記マーカー読取部は、前記マーカーからマーカーIDを読み取り、読み取ったマーカーIDを記憶部に記憶させる、請求項1に記載の無人搬送車。
【請求項8】
前記マーカーは、前記マーカーが付された前記被搬送物の目的地のデータを含み、
前記移動制御部は、前記目的地のデータに基づいて、前記被搬送物を所定の場所に搬送する、請求項1に記載の無人搬送車。
【請求項9】
前記無人搬送車は、全輪が駆動可能であると共に操舵可能である、請求項1に記載の無人搬送車。
【請求項10】
被搬送物の下に潜り込んで前記被搬送物を持ち上げてまたは牽引して搬送する無人搬送車の制御方法であって、
光学的読取装置によって前記無人搬送車の周辺を撮影するステップと、
前記光学的読取装置にて撮影された画像から前記被搬送物に付されたマーカーを検出し、検出したマーカーを読み取るステップと、
前記マーカーの位置に基づいて、前記被搬送物の前にターゲットを設定し、前記ターゲットの位置に前記無人搬送車を移動させるステップと、
前記ターゲットの位置に到着したときに再度前記マーカーを読み取り、前記マーカーから読み取った情報に基づいて前記無人搬送車を前記被搬送物の下に移動させるステップと、
を備える無人搬送車の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被搬送物に下に潜り込んで被搬送物を持ち上げてまたは牽引して搬送する無人搬送車およびその制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、カゴ台車などの被搬送物を搬送する無人搬送車が知られている。特許文献1は、ロールボックスのかごと走行面との間に潜り込んでロールボックスを搬送する搬送車を開示している。特許文献2は、台車の下側に潜り込んでリフターバーを上昇させることによって台車を牽引可能に構成された無人搬送車を開示している。特許文献3は、ワゴン台車の下に潜り込んでリフトアップし、ワゴン台車を外部から指示された目的地まで搬送する無人車を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2018-34932
特開2017-47996
特開平9-185413
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記したように、被搬送物の下に潜り込んで被搬送物を搬送する無人搬送車を開示した文献はあるが、どのようにして無人搬送車を被搬送物の下に潜りこませるかについての具体的な制御は開示されていない。
【0005】
無人搬送車が走行するコースと被搬送物が置かれる場所が予め決められていれば、無人搬送車が予定されたコースを走行するだけで、被搬送物の下に無人搬送車を潜り込ませることができる。
【0006】
しかし、無人搬送車の走行するコースを予め決めてしまうのは、柔軟性に欠ける。また、倉庫等の実際の現場においては、被搬送物であるカゴ台車等は、いつも同じ位置に同じ向きで置かれることを期待することはできず、被搬送物がずれて置かれることもしばしばである。適宜の場所に置かれた被搬送物の下に無人搬送車を潜り込ませることは容易ではない。
【0007】
上記背景に鑑み、本発明は、被搬送物の下に適切に潜り込ませることができる無人搬送車を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の無人搬送車は、被搬送物の下に潜り込んで前記被搬送物を持ち上げてまたは牽引して搬送する無人搬送車であって、前記無人搬送車の周辺を撮影する光学的読取装置と、前記光学的読取装置にて撮影された画像から前記被搬送物に付されたマーカーを検出し、検出したマーカーを読み取るマーカー読取部と、無人搬送車の移動を制御する移動制御部とを備え、前記移動制御部は、前記マーカーの位置に基づいて、前記被搬送物の前にターゲットを設定し、前記ターゲットの位置に前記無人搬送車を移動させる制御を行い、前記ターゲットの位置に到着したときに再度前記マーカーを読み取り、前記マーカーから読み取った情報に基づいて前記無人搬送車を前記被搬送物の下に移動させる制御を行う構成を有する。
【0009】
このようにマーカーから読み取った情報に基づいて被搬送物の前に設定したターゲットの位置に無人搬送車を移動させ、ターゲットの位置に移動したところで、再度マーカーを読み取って無人搬送車の移動を制御することにより、計算負荷を抑えつつ、無人搬送車を被搬送物の下に潜り込ませることができる。
【0010】
本発明の無人搬送車において、前記移動制御部は、前記ターゲットの位置に到着したときに再度前記マーカーを読み取り、前記マーカーの位置に基づいて、前記被搬送物の下に第2のターゲットを設定し、前記第2のターゲットの位置に前記無人搬送車を移動させる制御を行ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
22日前
個人
作業車両自動化システム
3日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
11日前
株式会社ダイフク
搬送設備
1日前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
生産管理システム
8日前
株式会社鷺宮製作所
制御装置
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
5日前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
マーク ヘイリー
消防ロボット
15日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社テイエルブイ
減圧弁の制御装置
17日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
オムロン株式会社
安全装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
三菱電機株式会社
電源回路
1か月前
株式会社ダイフク
飛行体制御システム
1か月前
ミツミ電機株式会社
電源回路および駆動回路
11日前
株式会社ダイヘン
搬送車
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ