TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114499
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2025005940
出願日
2025-01-16
発明の名称
機能的な安全性が要求されるシステムを制御するための方法および装置
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
主分類
G05B
9/03 20060101AFI20250729BHJP(制御;調整)
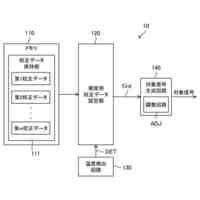
要約
【課題】機能的な安全性が要求されるシステムを制御するための方法、装置およびシステムを提供する。
【解決手段】システムの機能的な安全性に関する第1の要求を満たす第1の制御方法に従って前記システムの制御を決定し;第2の制御方法に従って前記システムの制御を決定し、前記第1の制御方法に従った前記システムの制御と前記第2の制御方法に従った前記システムの制御との間の差を決定し;決定された前記差に基づいて、前記システムの機能的な安全性に関する前記第1の要求に従って前記システムを制御するための信号をアウトプットすること、を含有している。
【選択図】図1
特許請求の範囲
【請求項1】
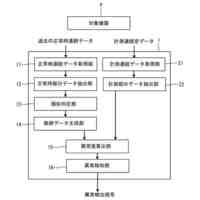
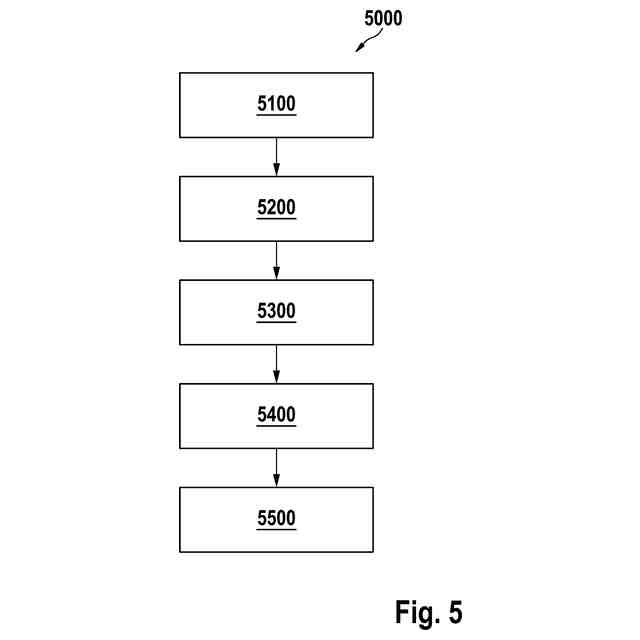
機能的な安全性が要求されるシステム(1000;3000)を制御するための方法(5000)において、
前記方法(5000)は、
前記システム(1000;3000)の機能的な安全性に関する第1の要求を満たす第1の制御方法(1210;4210)に従って前記システム(1000;3000)の制御を決定し(5100)、
第2の制御方法(1220;4220)に従って前記システム(1000;3000)の制御を決定し(5200)、
前記第1の制御方法(1210;4210)に従った前記システムの制御と前記第2の制御方法(1220;4220)に従った前記システムの制御との間の差を決定し(5300)、
決定された前記差に基づいて、前記システム(1000;3000)の機能的な安全性に関する前記第1の要求に従って前記システム(1000;3000)を制御するための信号をアウトプットする(5500)こと、
を含有する、機能的な安全性が要求されるシステム(1000;3000)を制御するための方法(5000)。
続きを表示(約 1,700 文字)
【請求項2】
前記方法(5000)はさらに、
前記差が前記第1の制御方法(1210;4210)に従った前記システム(1000;3000)の制御の周辺の第1の公差範囲内にあるかどうかを決定(5400)し、
前記差が前記第1の公差範囲内にあると決定されると、その決定に応答して、前記第2の制御方法(1220;4220)に従った前記システム(1000;3000)の制御に追従する、前記システム(1000;3000)を制御するための信号をアウトプット(5500)すること、
を含有する、請求項1記載の方法(5000)。
【請求項3】
前記方法(5000)はさらに、
前記差が前記第1の公差範囲の外にあると決定されると、その決定に応答して、前記第1の制御方法(1210;4210)に従った前記システム(1000;3000)の制御に追従する、前記システム(1000;3000)を制御するための信号をアウトプット(5500)すること、
を含有する、請求項2記載の方法(5000)。
【請求項4】
前記方法はさらに、
前記差が前記第1の公差範囲の外にあると決定されると、その決定に応答して、前記差が、前記第1の制御方法(1210;4210)に従った前記システム(1000;3000)の制御の周辺の第2の公差範囲内にあるかどうかを決定し、
前記システム(1000;3000)の機能的な安全性に関する第2の要求を満たす第3の制御方法に従った前記システム(1000;3000)の制御に追従する、前記システム(1000;3000)を制御するための信号をアウトプット(5500)すること、
を含有する、請求項2記載の方法(5000)。
【請求項5】
前記第1の制御方法(1210;4210)に従った前記システム(1000;3000)の制御の決定(5100)と、前記第2の制御方法(1220;4220)に従った前記システム(1000;3000)の制御の決定(5200)とを、同時におよび/または連続的におよび/または並行しておよび/または順次行う、請求項1から4までのいずれか1項記載の方法(5000)。
【請求項6】
前記第1の制御方法(1210;4210)を、前記システム(1000;3000)の運転モードに依存して、および/または前記システム(1000;3000)のユーザーの選択に依存して選択する、請求項1から5までのいずれか1項記載の方法(5000)。
【請求項7】
前記第1の制御方法(1210:4210)を複数の第1の制御方法から選択し、この際に、前記複数の第1の制御方法のそれぞれが機能的な安全性に関する前記第1の要求を満たすようにする、請求項1から6までのいずれか1項記載の方法(5000)。
【請求項8】
機能的な安全性が要求されるシステム(1000;3000)を制御するための装置(1200;3200)において、
該装置(1200;3200)は、
単数または複数のプロセッサを有していて、
コンピュータ読み取り可能な不揮発性の記憶媒体を有しており、この記憶媒体に指令が記憶されていて、この指令が単数または複数の前記プロセッサによって実行されると、この指令は、前記装置(1200;3200)が請求項1から7までのいずれか1項記載の方法に従って前記システム(1000;3000)を制御するように指示する、
機能的な安全性が要求されるシステム(1000;3000)を制御するための装置(1200;3200)。
【請求項9】
前記装置がさらに、少なくとも1つの電気機械式の制御装置を有していて、該電気機械式の制御装置が直接的な機械制御を許容しないようになっている、請求項8記載の装置(1200;3200)。
【請求項10】
システム(1000;3000)において、該システム(1000;3000)が、請求項8または9のいずれか1項記載の少なくとも1つの装置を有している、システム(1000;3000)。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機能的な安全性が要求されるシステム、特に自動車産業、航空機産業および/または航空宇宙産業におけるシステムを制御するための方法および装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
安全性に関する要求が課せられているシステムの構成要素を製造、変更および/または改善する際に、システムおよびその構成要素を、構成要素およびシステムの機能的な安全性に関する要求が満たされるように開発する必要がある。
【0003】
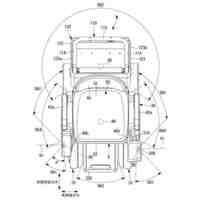
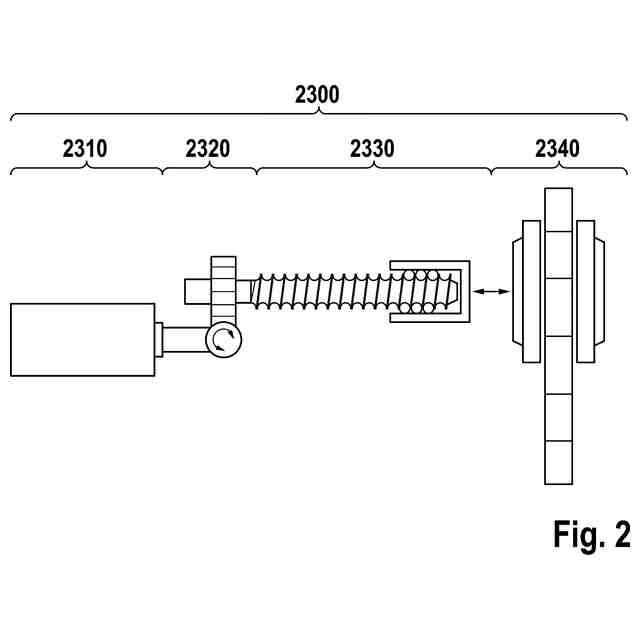
例として図2に示されているように、例えば直接的な機械式のブレーキ装置の代わりに間接的な電気機械式のブレーキ装置を車両に使用する場合、例えばカーブ走行時に車両の制御可能性に関する要求を満たす必要があり得る。車両のヨーイングは例えば阻止され得るので、車両によって誰も被害を受けることはない。
【0004】
例えば航空機の間接的な自動操縦を使用する場合、パイロットによる自動操縦の修正の可能性に関する要求を満たす必要があり得、それによって、間接的な自動操縦が誤って作動して修正されなければならないときに、被害を避けるために航空機を直接制御することができるようにしなければならない。
【0005】
電気機械式の装置は一般的に、システムの機能的な安全性に関する要求が満たされるようにシステムを制御するために、アクチュエータ、例えば、電動機が、電子制御を介して間接的に操作されるようになっている点で優れている。アクチュエータを制御するために例えば複数のセンサデータおよび/または複雑なアルゴリズムを使用することは、高価な実装に基づく技術的な観点からもまた構成要素レベルからシステムレベルまでの開発のための高価な費用に基づく資金的な観点からも、システムの機能的な安全性に関する要求の実現を困難にすることがある。
【0006】
システムを制御するための従来の装置は、システムを制御するための冗長性の制御方法および/または装置、ならびにシステムを制御するためのアクティブな制御方法および/またはアクティブな装置を監視するためのユニットを使用している。監視するためのユニットは、単数または複数の監視基準が満たされているかまたは満たされていないかの決定に応答して、アクティブな制御方法および/またはアクティブな装置から冗長性の制御方法および/または冗長性の装置に切替えるために構成されている。アクティブな制御方法および/またはアクティブな装置も、また冗長性の制御方法および/または冗長性の装置も、システムの機能的な安全性に関する要求を満たす必要がある。
【0007】
特許文献1には、少なくとも1つの摩擦ブレーキ装置およびこの摩擦ブレーキ装置を操作するための電気機械式のアクチュエータを有する、車両のための電気機械式のブレーキ装置が開示されており、この場合、電気機械式のブレーキ装置は空圧式に解除可能な蓄力ばねアクチュエータを有している。蓄力ばねアクチュエータは少なくとも1つの摩擦ブレーキエレメントに直接的に力を加えるために配置されかつ/または設けられていてよい。
【先行技術文献】
【特許文献】
【0008】
独国特許公開第102021121828号明細書
【発明の概要】
【0009】
本発明は、独立請求項に記載した特徴を有する、機能的な安全性が要求されるシステムを制御するための方法および装置を提供する。
【0010】
好適な実施例は、それぞれの従属請求項の対象である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
22日前
個人
作業車両自動化システム
3日前
愛知製鋼株式会社
目標軌跡の設定方法
11日前
ローム株式会社
半導体集積回路
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
生産管理システム
8日前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1日前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
トヨタ自動車株式会社
減圧弁
5日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
マーク ヘイリー
消防ロボット
15日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社テイエルブイ
減圧弁の制御装置
17日前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
三菱電機株式会社
電源回路
1か月前
オムロン株式会社
安全装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
ローム株式会社
半導体装置
2か月前
株式会社ダイフク
飛行体制御システム
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
26日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ