TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116660
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011201
出願日
2024-01-29
発明の名称
車線逸脱抑制装置、車線逸脱抑制方法、及び車線逸脱抑制プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/12 20200101AFI20250801BHJP(車両一般)
要約
【課題】車線からの自車両の逸脱を抑制する制御を終了した直後に走行環境の影響を受けて自車両が車線から再逸脱することを抑制可能な車線逸脱抑制装置を提供する。
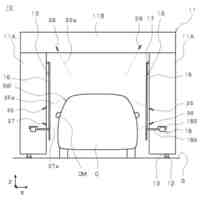
【解決手段】車線逸脱抑制装置のプロセッサは、車載センサから取得した情報に基づいて、自車両が車線L1の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了する。プロセッサは、前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の走行環境に関する情報、並びに、自車両が走行している車線における横方向位置及び横方向速度に関する情報を取得するための車載センサと、
前記車載センサから取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成されたプロセッサと、
を備えた車線逸脱抑制装置であって、
前記プロセッサは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定する、
ように構成された、車線逸脱抑制装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の車線逸脱抑制装置において、
前記第二条件は、自車両が前記車線の中央部側へ向かう際の自車両の横方向速度が所定の目標値を超えている場合に成立するように構成され、
前記走行環境に関する情報は、前記車線の幅に関する情報を含み、
前記プロセッサは、前記車線の幅が小さいほど、前記目標値に小さい値を割り当てる、
ように構成された、車線逸脱抑制装置。
【請求項3】
請求項2に記載の車線逸脱抑制装置において、
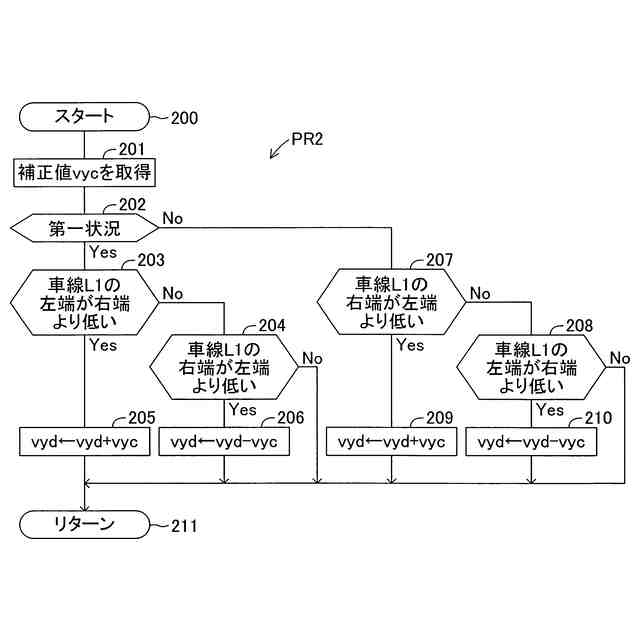
前記走行環境に関する情報は、さらに、前記車線のカントに関する情報を含み、
前記プロセッサは、前記車線の前記一端側が前記他端側よりも低い場合に、その高低差が大きいほど前記目標値に大きい補正値を加算し、前記車線の前記一端側が前記他端側よりも高い場合に、その高低差が大きいほど前記目標値から大きい値を減算する、
ように構成された、車線逸脱抑制装置。
【請求項4】
自車両の走行環境に関する情報、並びに、自車両が走行している車線における横方向位置及び横方向速度に関する情報を取得する情報取得ステップと、
前記情報取得ステップにて取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成された車両制御ステップと、
を備えた車線逸脱抑制方法であって、
前記車両制御ステップは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定するステップを含む、
ように構成された車線逸脱抑制方法。
【請求項5】
自車両が備えるコンピュータに、
自車両の走行環境に関する情報、並びに、自車両が走行している車線における横方向位置及び横方向速度に関する情報を取得する情報取得ステップと、
前記情報取得ステップにて取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成された車両制御ステップと、
を実行させる車線逸脱抑制プログラムであって、
前記車両制御ステップは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定するステップを含む、
ように構成された車線逸脱抑制プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両が走行している車線から逸脱することを抑制する車線逸脱抑制装置、車線逸脱抑制方法、及び車線逸脱抑制プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
自車両が走行している車線から逸脱することを抑制する車線逸脱抑制装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1の車線逸脱抑制装置(以下、「従来装置」と称呼する。)のプロセッサは、自車両が走行している車線から路肩へ進入した場合(車線から逸脱した場合)に、自車両が元の車線に戻るように自車両(各車輪の駆動装置及び/又は制動装置)を制御する車線逸脱抑制処理を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2007-210412号公報
【発明の概要】
【0004】
上記のように、従来装置のプロセッサが、車線逸脱抑制処理を実行することにより、自車両は元の車線の幅方向における中央部側へ進行する。ここで、例えば、車線の幅が比較的小さい状況において、車線逸脱抑制処理により車線の左端側から中央部側へ自車両が進行している状態で当該車線逸脱抑制処理が終了された場合、その直後に、車線の右端(前回とは反対側の端部)から自車両が再び逸脱してしまう虞がある。また、車線逸脱抑制処理が終了された直後に、車線のカントや横風の影響を受けて、自車両が車線から再逸脱する虞がある。このように、プロセッサが当該車線逸脱抑制処理を終了した直後(短期間内)に、自車両の走行環境の影響を受けて、自車両が車線から再逸脱する可能性がある。従来装置は、このような再逸脱を抑制する手段を備えていない。
【0005】
本発明の目的の1つは、車線からの自車両の逸脱を抑制する制御を終了した直後に走行環境の影響を受けて自車両が車線から再逸脱することを抑制可能な車線逸脱抑制装置を提供することにある。
【0006】
上記課題を解決するために、本発明の車線逸脱抑制装置(1)は、
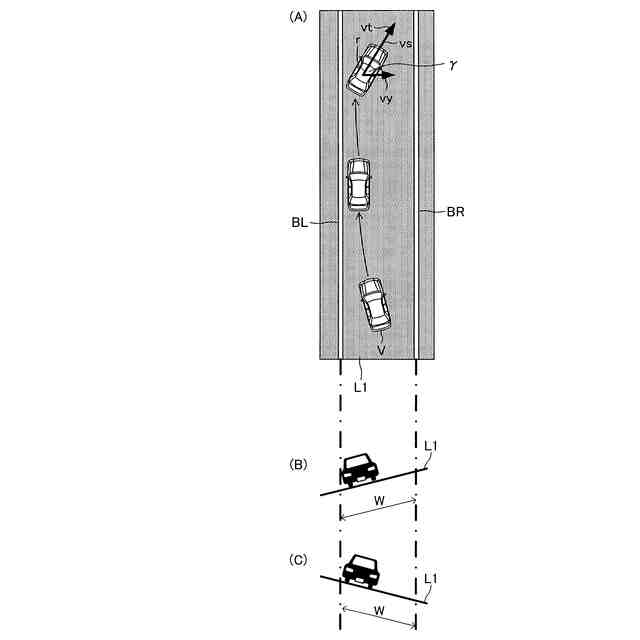
自車両(V)の走行環境(W、C)に関する情報、並びに、自車両が走行している車線(L1)における横方向位置及び横方向速度に関する情報を取得するための車載センサ(20)と、
前記車載センサから取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理(P1、P2)を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成されたプロセッサ(10)と、
を備える。
前記プロセッサは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定する、
ように構成される。
【0007】
また、本発明の車両制御方法は、 自車両の走行環境に関する情報、並びに、自車両が走行している車線における横方向位置及び横方向速度に関する情報を取得する情報取得ステップと、
前記情報取得ステップにて取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成された車両制御ステップと、
を含む。
前記車両制御ステップは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定するステップを含む、
ように構成される。
【0008】
また、本発明の車線逸脱抑制プログラムは、
自車両が備えるコンピュータに、
自車両の走行環境に関する情報、並びに、自車両が走行している車線における横方向位置及び横方向速度に関する情報を取得する情報取得ステップと、
前記情報取得ステップにて取得した情報に基づいて、自車両が前記車線の幅方向における一端から前記車線の外側へ逸脱する可能性が高いと判定するための第一条件が成立した場合に、当該車線からの自車両の逸脱が抑制されるように自車両を制御する車線逸脱抑制処理を開始し、その後に、所定の第二条件が成立した場合に前記車線逸脱抑制処理の実行を終了するように構成された車両制御ステップと、
を実行させる。
前記車両制御ステップは、
前記車線逸脱抑制処理の実行により自車両が前記車線の幅方向における中央部側へ進行している状態で前記車線逸脱抑制処理を終了した後の所定期間内に前記走行環境の影響を受けて自車両が前記車線から再逸脱することが抑制されるように、前記走行環境に関する情報に基づいて前記第二条件を設定するステップを含む、
ように構成される。
【0009】
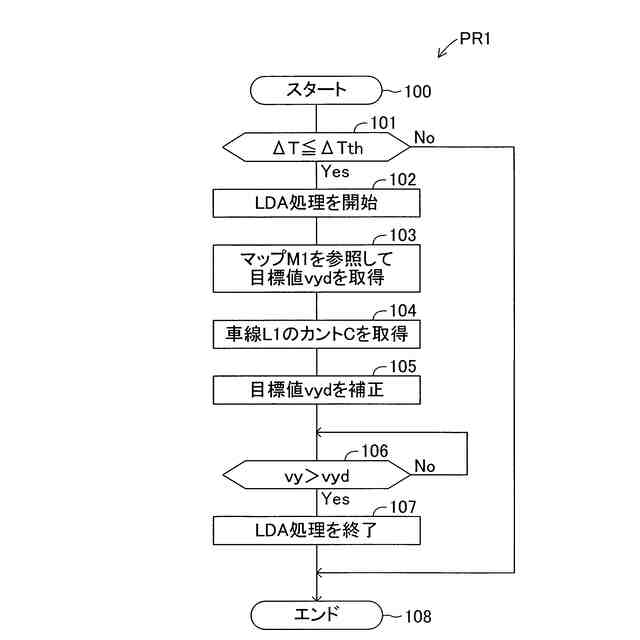
本発明に係る車線逸脱抑制装置のプロセッサは、自車両が車線から逸脱する可能性が高い場合(第一条件が成立した場合)に、当該逸脱を抑制するための車線逸脱抑制処理を実行する。これにより、自車両が車線の幅方向における中央部側へ進行し始める。そして、プロセッサは、所定の終了条件(第二条件が成立した場合)に、車線逸脱抑制処理を終了する。ここで、車線逸脱抑制処理を終了した後の所定期間内(短期間内)に、自車両が、走行環境(例えば、車線の幅、カント、横風など)の影響を受けて、車線の一端又は他端から逸脱(再逸脱)してしまう可能性がある。本発明によれば、走行環境に応じて第二条件が設定される。これにより、上記のような再逸脱が抑制される。
【0010】
本発明の一態様に係る車線逸脱抑制装置において、
前記第二条件は、自車両が前記車線の中央部側へ向かう際の自車両の横方向速度(vy)が所定の目標値(vyd)を超えている場合に成立するように構成され、
前記走行環境に関する情報は、前記車線の幅(W)に関する情報を含み、
前記プロセッサは、前記車線の幅が小さいほど、前記目標値に小さい値を割り当てる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
10日前
個人
車輪清掃装置
2か月前
個人
ルーフ付きトライク
1日前
個人
ホイルのボルト締結
1か月前
個人
車両通過構造物
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
8日前
日本精機株式会社
表示装置
8日前
日本精機株式会社
表示装置
8日前
個人
キャンピングトライク
1か月前
個人
ワイパーゴム性能保持具
2か月前
個人
アクセルのソフトウェア
1か月前
個人
車両用スリップ防止装置
1か月前
個人
乗合路線バスの客室装置
23日前
個人
キャンピングトレーラー
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
個人
音声ガイド、音声サービス
16日前
株式会社豊田自動織機
産業車両
5日前
株式会社ニフコ
保持装置
1か月前
日本精機株式会社
車載表示装置
1か月前
個人
円湾曲ホイール及び球体輪
23日前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用投影装置
2か月前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
1か月前
日本無線株式会社
取付金具
17日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1日前
極東開発工業株式会社
車両
8日前
井関農機株式会社
作業車両
1か月前
エムケー精工株式会社
車両処理装置
12日前
エムケー精工株式会社
車両処理装置
2か月前
豊田合成株式会社
乗員保護装置
8日前
トヨタ自動車株式会社
制御装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ