TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116732
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011333
出願日
2024-01-29
発明の名称
移動ロボット、移動ロボットの制御方法、およびプログラム
出願人
グローリー株式会社
代理人
個人
主分類
G05D
1/697 20240101AFI20250801BHJP(制御;調整)
要約
【課題】目標の台車の下方空間に対して正確に進入しつつ当該台車に正確にドッキングすることが可能な技術を提供する。
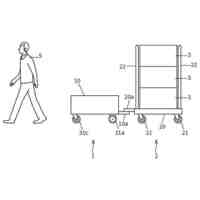
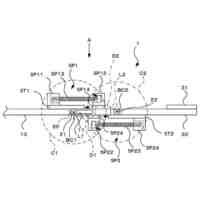
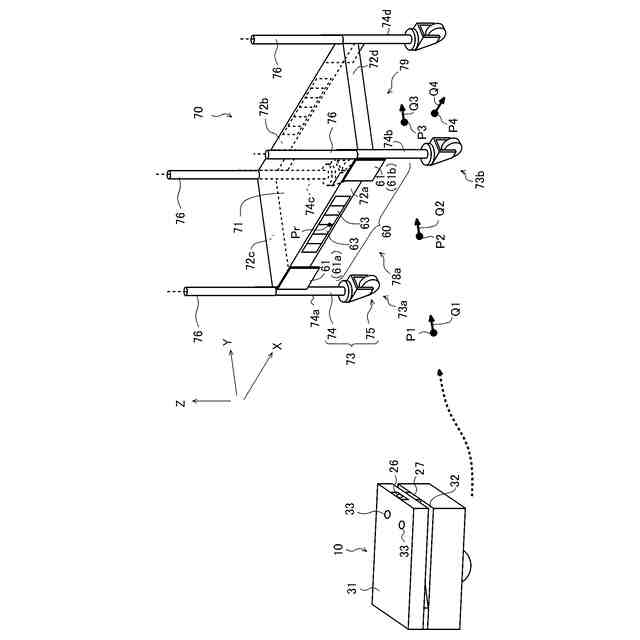
【解決手段】移動ロボット10は、荷物を搭載可能な台車70の下方空間79に進入して台車70にドッキングし、台車70とともに移動することが可能である。移動ロボット10は、台車70の下方空間79へと進入する前において、台車70に対する移動ロボット10の相対位置姿勢(自装置の位置姿勢)をカメラ26による撮影画像内の2次元マーカ60に基づいて認識して移動する。また、移動ロボット10は、台車70の下方空間79へ進入した後において、台車70に対する移動ロボット10の相対位置姿勢をレーザセンサ27による測定結果に基づいて認識して移動する。
【選択図】図1
特許請求の範囲
【請求項1】
荷物を搭載可能な台車の下方空間に進入して前記台車にドッキングし、前記台車とともに移動することが可能な移動ロボットであって、
前記台車の側面に配置された2次元マーカを撮影するカメラと、
レーザ光を照射して周辺物体までの距離を取得するレーザセンサと、
前記台車の下方空間の外部から前記下方空間へと進入し前記台車とのドッキング位置へと向かう移動制御を実行する制御部と、
を備え、
前記制御部は、
前記移動ロボットが前記台車の下方空間へと進入する前において、前記台車に対する前記移動ロボットの相対位置姿勢を前記カメラによる撮影画像内の前記2次元マーカに基づいて認識して前記移動ロボットを駆動し、
前記移動ロボットが前記台車の下方空間へ進入した後において、前記台車に対する前記移動ロボットの相対位置姿勢を前記レーザセンサによる測定結果に基づいて認識して前記移動ロボットを駆動することを特徴とする、移動ロボット。
続きを表示(約 1,600 文字)
【請求項2】
前記制御部は、前記移動ロボットが前記台車の下方空間へと進入する前において、
前記台車の側面に配置された前記2次元マーカに関する認識結果に基づき、前記台車の下方空間への進入前における暫定目標位置姿勢を設定し、
前記暫定目標位置姿勢に向けて前記移動ロボットを駆動することを特徴とする、請求項1に記載の移動ロボット。
【請求項3】
前記暫定目標位置姿勢のうちの目標姿勢は、上面視において前記台車の前記側面に対して垂直に向かう姿勢であることを特徴とする、請求項2に記載の移動ロボット。
【請求項4】
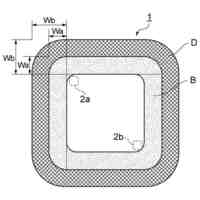
前記2次元マーカは、第1マーカと第2マーカとを有し、
前記制御部は、前記移動ロボットが前記台車の下方空間へと進入する前において、
前記第2マーカよりも大きな前記第1マーカに関する認識結果に基づき、第1暫定目標位置姿勢を設定するとともに、前記第1暫定目標位置姿勢に向けて前記移動ロボットを駆動し、
前記第1暫定目標位置姿勢へ向かう移動によって前記移動ロボットが前記台車に近づいた後に、前記第1マーカよりも小さな前記第2マーカに関する認識結果に基づき、第2暫定目標位置姿勢を設定するとともに、前記第2暫定目標位置姿勢に向けて前記移動ロボットを駆動することを特徴とする、請求項1から請求項3のいずれかに記載の移動ロボット。
【請求項5】
前記第2マーカは、前記側面の下方開口部の直上部分且つ前記側面の水平方向中央部分に配置されていることを特徴とする、請求項4に記載の移動ロボット。
【請求項6】
前記制御部は、前記移動ロボットが前記台車の下方空間へと進入する前において、前記撮影画像内の前記2次元マーカにて示される識別子に基づき、当該2次元マーカが配置された対象物が目標の台車であるか否かを判定することを特徴とする、請求項1から請求項5のいずれかに記載の移動ロボット。
【請求項7】
前記制御部は、前記移動ロボットが前記台車の下方空間へ進入する際にも、前記台車に対する前記移動ロボットの相対位置姿勢を前記レーザセンサによる測定結果に基づいて認識して前記移動ロボットを駆動することを特徴とする、請求項1から請求項6のいずれかに記載の移動ロボット。
【請求項8】
前記制御部は、前記移動ロボットが前記台車の下方空間へ進入する際に及び/又は前記台車の下方空間へ進入した後において、前記レーザセンサによる測定結果に基づき前記台車の少なくとも2つの脚部の位置を特定することにより、前記台車に対する前記移動ロボットの相対位置姿勢を認識することを特徴とする、請求項1から請求項7のいずれかに記載の移動ロボット。
【請求項9】
前記制御部は、前記移動ロボットが前記台車の下方空間へ進入する際に及び/又は前記台車の下方空間へ進入した後において、前記レーザセンサによる測定結果に基づき前記台車の少なくとも2つの脚部の位置を特定して前記台車の下方空間への進入後における目標位置姿勢を設定し、前記目標位置姿勢に向けて前記移動ロボットを駆動することを特徴とする、請求項1から請求項8のいずれかに記載の移動ロボット。
【請求項10】
前記制御部は、前記移動ロボットが前記台車の下方空間へ進入する際に及び/又は前記台車の下方空間へ進入した後において、前記レーザセンサによる測定結果に基づき前記台車の少なくとも2つの脚部の位置を特定するにあたり、前記撮影画像内の前記2次元マーカを用いて得られた前記相対位置姿勢の認識結果に基づき各脚部の推定位置を求め、前記レーザセンサによる測定範囲のうち、前記各脚部の推定位置の所定近傍範囲を探索範囲として設定し、当該探索範囲の中から前記各脚部を探索することを特徴とする、請求項1から請求項9のいずれかに記載の移動ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動ロボットおよびそれに関連する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
荷物を搭載可能な台車の下方空間に進入して当該台車にドッキング(結合(連結))し、当該台車とともに移動することが可能な移動ロボットが存在する(たとえば、特許文献1参照)。
【0003】
たとえば、特許文献1には、かご台車に対してドッキング可能な無人搬送車が記載されている。当該無人搬送車には、空間平面における周辺物体までの距離をレーザ走査により測定するレーザセンサが設けられる。かご台車のキャスターを当該レーザセンサによって検出してドッキング位置が算出され、ドッキング位置に向けて無人搬送車が移動される。これによれば、かご台車に正確にドッキングすることが可能である。
【先行技術文献】
【特許文献】
【0004】
特開2022-146514号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、目標の台車(ドッキング対象(連結対象)の台車)の周辺には、様々な障害物あるいは他の台車等が存在することがある。
【0006】
移動ロボットが台車の下方空間に進入する前においては、様々な障害物あるいは他の台車等もがレーザセンサの検出対象(測距対象)になり得る。特に目標の台車よりも一定程度手前(当該台車から一定程度離れた位置)にてレーザセンサによる測定を行う場合に、そのような状況が発生し易い。当該状況においては、当該様々な障害物あるいは他の台車等に起因する誤検出が発生する可能性が一定程度存在する。
【0007】
たとえば、互いに近接して存在する複数の台車のうちの一の台車が目標の台車である場合、当該複数の台車よりも一定程度手前に存在する移動ロボットが、目標の台車の脚部と他の台車(隣の台車等)の脚部とをレーザセンサの測定結果(測距結果)のみによって正確に区別して認識することは容易ではなく、誤検出が発生し得る。また、目標の台車の脚部の形状に類似する形状を有する障害物が台車の近傍に存在する場合にも、台車よりも一定程度手前に存在する移動ロボットが、当該障害物と台車の脚部とをレーザセンサの測定結果のみによって正確に区別して認識することは容易ではなく、誤検出が発生し得る。
【0008】
このような誤検出が発生すると、目標の台車の下方空間に対して正確に進入することは困難である。
【0009】
そこで、この発明は、目標の台車の下方空間に対して正確に進入しつつ当該台車に正確にドッキングすることが可能な技術を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決すべく、本発明に係る移動ロボットは、荷物を搭載可能な台車の下方空間に進入して前記台車にドッキングし、前記台車とともに移動することが可能な移動ロボットであって、前記台車の側面に配置された2次元マーカを撮影するカメラと、レーザ光を照射して周辺物体までの距離を取得するレーザセンサと、前記台車の下方空間の外部から前記下方空間へと進入し前記台車とのドッキング位置へと向かう移動制御を実行する制御部と、を備え、前記制御部は、前記移動ロボットが前記台車の下方空間へと進入する前において、前記台車に対する前記移動ロボットの相対位置姿勢を前記カメラによる撮影画像内の前記2次元マーカに基づいて認識して前記移動ロボットを駆動し、前記移動ロボットが前記台車の下方空間へ進入した後において、前記台車に対する前記移動ロボットの相対位置姿勢を前記レーザセンサによる測定結果に基づいて認識して前記移動ロボットを駆動することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
22日前
個人
作業車両自動化システム
3日前
愛知製鋼株式会社
目標軌跡の設定方法
11日前
ローム株式会社
半導体集積回路
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
1日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
トヨタ自動車株式会社
生産管理システム
8日前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
トヨタ自動車株式会社
減圧弁
5日前
株式会社鷺宮製作所
制御装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
マーク ヘイリー
消防ロボット
15日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社テイエルブイ
減圧弁の制御装置
17日前
三菱電機株式会社
電源回路
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
オムロン株式会社
安全装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
株式会社ダイフク
飛行体制御システム
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
26日前
株式会社ダイヘン
搬送車
2か月前
ミツミ電機株式会社
電源回路および駆動回路
11日前
ローム株式会社
半導体装置
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ