TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117553
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2025010620
出願日
2025-01-24
発明の名称
多重ドメインオブジェクト感知方法及び装置
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
,
亞洲大学校産学協力団
代理人
弁理士法人共生国際特許事務所
主分類
G06T
7/00 20170101AFI20250804BHJP(計算;計数)
要約
【課題】ドメインに関係なく効果的に学習でき、新ドメインのデータに対するオブジェクト検出性能を高められる多重ドメインオブジェクト感知方法及び装置を提供する。
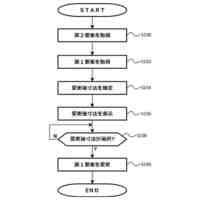
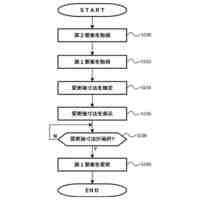
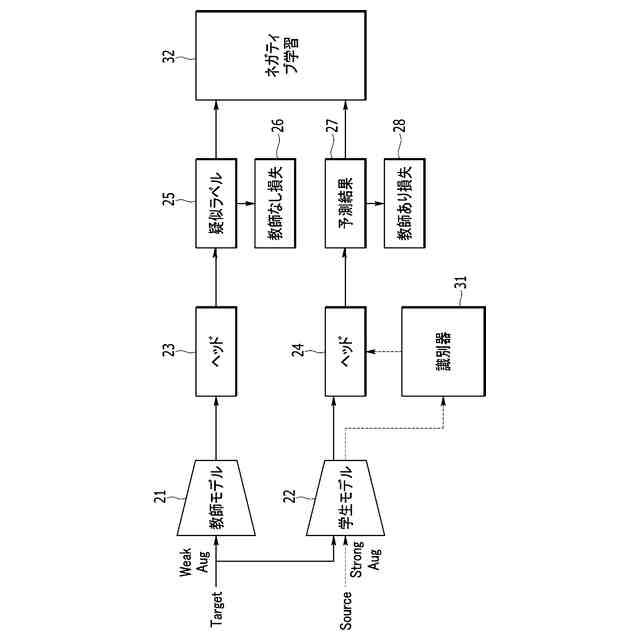
【解決手段】多重ドメインオブジェクト感知装置による感知方法は、教師モデル及び学生モデルを生成するステップ、対象イメージに対して弱い増強が適用されたイメージを教師モデルに入力するステップ、疑似ラベルが予め設定された臨界値未満であるかを判定するステップ、疑似ラベルが臨界値未満であると判定された場合、疑似ラベルに対応するクラスに対してネガティブ学習を行うステップ、対象イメージに対して強い増強が適用されたイメージを学生モデルに入力するステップ、第1予測結果と疑似ラベルとを比較して教師なし損失を計算するステップ、指数移動平均を用いて教師モデルを更新するステップ及び教師モデルを用いて他のドメインのイメージでオブジェクトを感知するステップを含む。
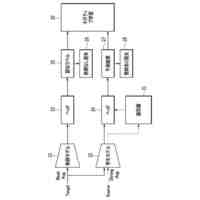
【選択図】図2
特許請求の範囲
【請求項1】
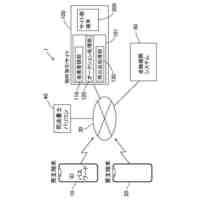
プロセッサ及びメモリを含むコンピューティング装置によって行われる、カテゴリーベースのドメイン学習による多重ドメインオブジェクト感知方法であって、
前記プロセッサが、事前学習済みのモデルから教師(teacher)モデル及び学生(student)モデルを生成するステップ、
前記プロセッサが、オブジェクトを感知しようとする対象イメージ(target image)に対して弱い増強(weak augmentation)が適用されたイメージを前記教師モデルに入力するステップ、
前記プロセッサが、前記教師モデルで生成された疑似ラベル(pseudolabel)が予め設定された臨界値未満であるかを判定するステップ、
前記疑似ラベルが前記臨界値未満であると判定された場合、前記プロセッサが前記疑似ラベルに対応するクラスに対してネガティブ学習(negative learning)を行うステップ、
前記プロセッサが、前記対象イメージに対して強い増強(strong augmentation)が適用されたイメージを前記学生モデルに入力するステップ、
前記プロセッサが、前記学生モデルから生成された第1予測結果(prediction)と前記疑似ラベルとを比較して教師なし損失を計算するステップ、
前記プロセッサが、前記学生モデルで定められた指数移動平均(exponential moving average、EMA)を用いて前記教師モデルを更新するステップ、及び
前記教師モデルを用いて他のドメインのイメージでオブジェクトを感知するステップ、を含む、ことを特徴とする多重ドメインオブジェクト感知方法。
続きを表示(約 1,600 文字)
【請求項2】
前記プロセッサが、前記学生モデルで生成された特徴マップ(feature map)を第1識別器に通した後、前記第1予測結果を生成する第1ヘッド(head)に伝達するステップをさらに含む、ことを特徴とする請求項1に記載の多重ドメインオブジェクト感知方法。
【請求項3】
前記教師モデルで前記疑似ラベルが前記予め設定された臨界値未満であるかを判定するステップは、
前記プロセッサが、前記疑似ラベルのうち最も高いクラス確率値を有する第1疑似ラベルが前記臨界値未満であるかを判定するステップを含み、
前記ネガティブ学習を行うステップは、
前記第1疑似ラベルが前記臨界値未満であると判定された場合、前記プロセッサが、前記疑似ラベルで前記第1疑似ラベルを除いた残りの中からk個(ここで、kは、自然数)の疑似ラベルを選定するステップ、及び
前記プロセッサが、前記第1疑似ラベル及び前記k個の疑似ラベルに対応するクラスに対して前記ネガティブ学習を行うステップ、を含む、ことを特徴とする請求項1に記載の多重ドメインオブジェクト感知方法。
【請求項4】
前記ネガティブ学習を行うステップは、
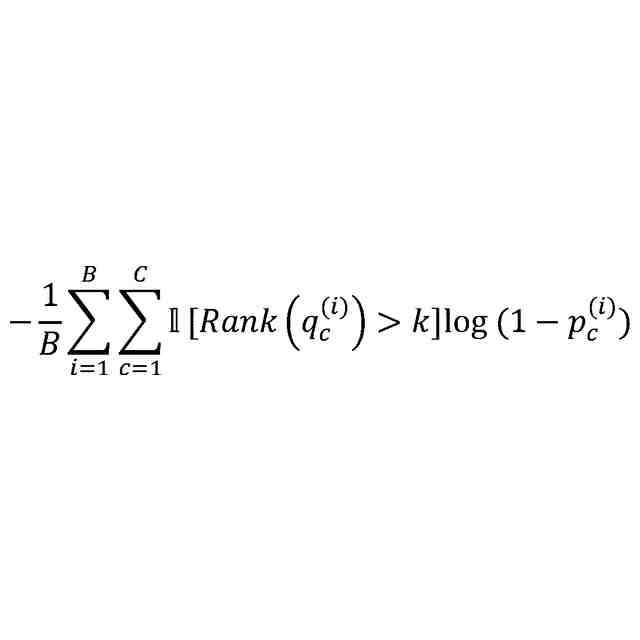
前記プロセッサが、下記の数式によるネガティブ学習損失に基づいて前記ネガティブ学習を行うステップを含む、ことを特徴とする請求項1に記載の多重ドメインオブジェクト感知方法。
TIFF
2025117553000008.tif
15
128
TIFF
2025117553000009.tif
27
168
【請求項5】
前記第1予測結果は、クラス予測値及びバウンディングボックス予測値を含む、ことを特徴とする請求項2に記載の多重ドメインオブジェクト感知方法。
【請求項6】
前記プロセッサが、予め設けられた第2識別器(discriminator)に基づいて事前学習を行うステップをさらに含む、ことを特徴とする請求項1に記載の多重ドメインオブジェクト感知方法。
【請求項7】
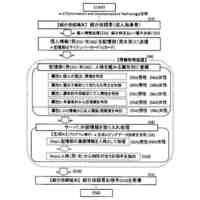
前記事前学習を行うステップは、
前記プロセッサが、予め設けられたデータセットをバックボーン(backbone)に入力して特徴マップ(feature map)を生成するステップ、
前記プロセッサが、前記特徴マップを前記第2識別器に通した後、第2予測結果(prediction)を生成する第2ヘッド(head)に伝達するステップ、及び
前記プロセッサが、前記第2予測結果と正解(ground truth)とを比較して教師あり損失を計算し、逆転波を通じて重みを更新するステップ、を含む、ことを特徴とする請求項6に記載の多重ドメインオブジェクト感知方法。
【請求項8】
前記事前学習を行うステップは、
予め定められた回数(iteration)の間、前記事前学習を繰り返して行うステップを含む、ことを特徴とする請求項6に記載の多重ドメインオブジェクト感知方法。
【請求項9】
前記第2予測結果は、クラス予測値及びバウンディングボックス予測値を含む、ことを特徴とする請求項7に記載の多重ドメインオブジェクト感知方法。
【請求項10】
前記教師モデルを用いて他のドメインのイメージでオブジェクトを感知するステップは、
RGBイメージに関するRGBドメインで学習済みの前記教師モデルを用いて、IR(Infrared)イメージに関するIRドメイン、熱画像イメージに関する熱画像ドメインまたはLiDAR(Light Detection And Ranging)イメージに関するLiDARイメージで前記オブジェクトを感知するステップを含む、ことを特徴とする請求項1に記載の多重ドメインオブジェクト感知方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、カテゴリーベースのドメイン学習による多重ドメインオブジェクト感知方法及び装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ディープラーニングモデルは、オブジェクトを正確に検出するか分類するためにラベル付きのイメージデータを大量で必要とする。しかし、ラベル付きのイメージを収集して製作する過程は、時間的にも費用的にも限界を有する。特に多様なドメインからデータを確保することは一層難しい課題となる。ドメイン適応(domain adaptation)は、このような問題を解決するために提案された技術であって、ラベル付きのソースドメイン(source domain)とラベル無し対象ドメイン(target domain)間の格差を減らすことを目的とする。一般的にドメイン適応は、ソース及び対象ドメインイメージ全体の特徴マップ(feature map)を基準にドメイン間の差を計算して、モデルを学習させる方式で動作する。
【0003】
しかし、オブジェクト検出分野では、一般的なドメイン適応方法では十分な学習効果を得にくい場合がある。オブジェクト検出分野の場合、オブジェクトのカテゴリーごとに固有の特徴が存在し、ドメイン間差が大きいためである。例えば、同一のオブジェクトでも、RGB、IR(Infrared)、熱画像などドメインによってその表現方式が大きく変わり、このような差をモデルが効果的に学習できない可能性が大きい。これによってオブジェクト検出分野では、ドメイン適応の既存の方法論だけでは十分な性能を保障しにくいことがある。
【先行技術文献】
【特許文献】
【0004】
特開2023-145404号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
解決しようとする一課題は、ドメインに関係なくオブジェクトが有する固有の特徴を効果的に学習することができ、新しいドメインのデータに対するオブジェクト検出性能を高めることができる多重ドメインオブジェクト感知方法及び装置を提供することである。
【課題を解決するための手段】
【0006】
一実施形態に係る多重ドメインオブジェクト感知方法は、プロセッサ及びメモリを含むコンピューティング装置によって行われる、カテゴリーベースのドメイン学習による多重ドメインオブジェクト感知方法であって、前記プロセッサが、事前学習済みのモデルから教師(teacher)モデル及び学生(student)モデルを生成するステップ;前記プロセッサが、オブジェクトを感知しようとする対象イメージ(target image)に対して弱い増強(weak augmentation)が適用されたイメージを前記教師モデルに入力するステップ;前記プロセッサが、前記教師モデルで生成された疑似ラベル(pseudolabel)が予め設定された臨界値未満であるかを判定するステップ;前記疑似ラベルが前記臨界値未満であると判定された場合、前記プロセッサが前記疑似ラベルに対応するクラスに対してネガティブ学習(negative learning)を行うステップ;前記プロセッサが、前記対象イメージに対して強い増強(strong augmentation)が適用されたイメージを前記学生モデルに入力するステップ;前記プロセッサが、前記学生モデルから生成された第1予測結果(prediction)と前記疑似ラベルとを比較して教師なし損失を計算するステップ;前記プロセッサが、前記学生モデルで定められた指数移動平均(exponential moving average、EMA)を用いて前記教師モデルを更新するステップ;及び前記教師モデルを用いて他のドメインのイメージでオブジェクトを感知するステップを含むことができる。
【0007】
一実施形態で、前記方法は、前記プロセッサが、前記学生モデルで生成された特徴マップ(feature map)を第1識別器に通した後、前記第1予測結果を生成する第1ヘッド(head)に伝達するステップをさらに含むことができる。
【0008】
一実施形態で、前記教師モデルで疑似ラベルが予め設定された臨界値未満であるかを判定するステップは、前記プロセッサが、前記疑似ラベルのうち最も高いクラス確率値を有する第1疑似ラベルが前記臨界値未満であるかを判定するステップを含み、前記ネガティブ学習を行うステップは、前記第1疑似ラベルが前記臨界値未満であると判定された場合、前記プロセッサが、前記疑似ラベルで前記第1疑似ラベルを除いた残りの中からk個(ここで、kは、自然数)の疑似ラベルを選定するステップ;及び前記プロセッサが、前記第1疑似ラベル及び前記k個の疑似ラベルに対応するクラスに対して前記ネガティブ学習を行うステップを含むことができる。
【0009】
一実施形態で、前記ネガティブ学習を行うステップは、前記プロセッサが、下記の数式によるネガティブ学習損失に基づいて前記ネガティブ学習を行うステップを含むことができる。
TIFF
2025117553000002.tif
15
128
TIFF
2025117553000003.tif
27
168
【0010】
一実施形態で、前記第1予測結果は、クラス予測値及びバウンディングボックス予測値を含むことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
現代自動車株式会社
電子装置及びその制御方法
6日前
現代自動車株式会社
多重ドメインオブジェクト感知方法及び装置
6日前
現代自動車株式会社
ユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置
17日前
個人
裁判のAI化
1か月前
個人
情報処理システム
1か月前
個人
工程設計支援装置
3日前
個人
フラワーコートA
11日前
個人
検査システム
1か月前
個人
記入設定プラグイン
1か月前
個人
介護情報提供システム
18日前
個人
設計支援システム
24日前
個人
設計支援システム
24日前
個人
携帯情報端末装置
4日前
キヤノン電子株式会社
携帯装置
1か月前
個人
結婚相手紹介支援システム
今日
個人
不動産売買システム
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
株式会社カクシン
支援装置
27日前
個人
アンケート支援システム
13日前
個人
備蓄品の管理方法
1か月前
株式会社BONNOU
管理装置
2か月前
個人
ジェスチャーパッドのガイド部材
17日前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
サクサ株式会社
中継装置
14日前
キヤノン電子株式会社
名刺管理システム
1か月前
株式会社アジラ
移動方向推定装置
12日前
東洋電装株式会社
操作装置
1か月前
東洋電装株式会社
操作装置
1か月前
株式会社寺岡精工
システム
17日前
ホシデン株式会社
タッチ入力装置
1か月前
株式会社ワコム
電子消去具
1か月前
アスエネ株式会社
排水量管理方法
1か月前
個人
リテールレボリューションAIタグ
10日前
株式会社東芝
電子機器
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ