TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117780
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012685
出願日
2024-01-31
発明の名称
作業現場の危険予知装置、危険予知システム、危険予知方法
出願人
株式会社アクシス
代理人
弁理士法人スズエ国際特許事務所
主分類
G08B
25/04 20060101AFI20250805BHJP(信号)
要約
【課題】建築物などの作業現場において、早い時期に危険を予知することができる、作業現場の危険予知装置、危険予知システム、危険予知方法を提供する。
【解決手段】作業員の装着具は、作業員が身体に装着するボディー装着帯と、前記ボディー装着帯に連結された右フック構体と、前記ボディー装着帯に連結された左フック構体を備える。ボディー装着帯にボディー姿勢センサ300C、右フック構体に右姿勢センサ300R,左フック構体に左姿勢センサ300Lが取り付けられる。ボディー姿勢センサ300Cは、左右の姿勢センサ300L、300Rから姿勢検知出力信号を受信し、左右の姿勢センサ300L、300Rが、安全な個所に係止されているか否かを高速で検知する。
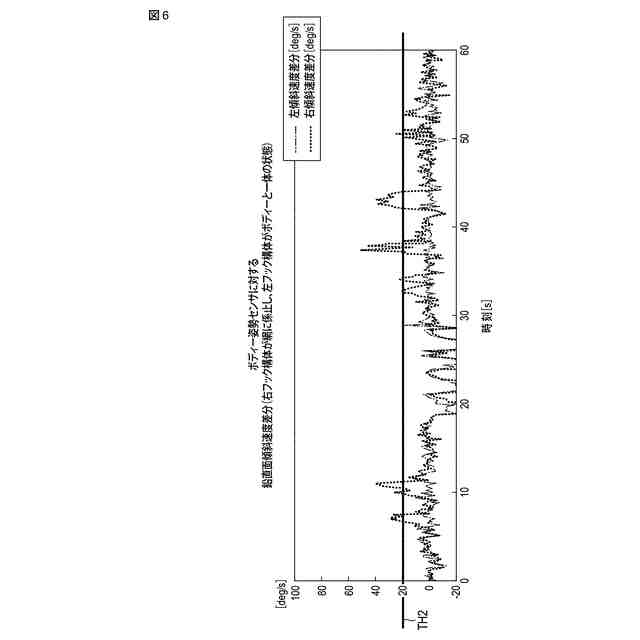
【選択図】図6
特許請求の範囲
【請求項1】
監視対象の身体に装着可能なボディー装着帯と、前記ボディー装着帯に右フック用帯を介して連結された右フック構体と、前記ボディー装着帯に左フック用帯を介して連結された左フック構体を備えた装着具と、
前記ボディー装着帯に取り付けられたボディー姿勢センサと、
前記右フック構体又は前記右フック用帯のいずれかに取り付けられた右姿勢センサと、
前記左フック構体又は前記左フック用帯のいずれかに取り付けられた左姿勢センサと、
前記ボディー姿勢センサに設けられており、前記右姿勢センサと前記左姿勢センサとから無線により送信される右姿勢検出出力と左姿勢検出出力を受信する受信器と、
前記受信器で受信した前記右姿勢検出出力及び前記左姿勢検出出力と、前記ボディー姿勢センサで得られるボディー姿勢検出出力とを用いる演算器及び状態判定器であって、
前記ボディー姿勢センサの基準鉛直面に対する傾斜速度を基準とし、前記右姿勢センサの傾斜速度を前記基準鉛直面に対する右傾斜速度差分に補正し、
また前記ボディー姿勢センサの前記基準鉛直面に対する前記傾斜速度を基準とし、前記左姿勢センサの傾斜速度を前記基準鉛直面に対する左傾斜速度差分に補正し、
設定した期間内で、前記右傾斜速度差分の値が閾値以下の場合と、前記左傾斜速度差分の値が閾値以下の場合の少なくとも一方が成立する場合は、警告信号を出力する演算器及び状態判定器と、
を備える作業現場の危険予知装置。
続きを表示(約 2,100 文字)
【請求項2】
前記警告信号は、前記状態判定器に接続されたスピーカ又は発光素子に供給される、請求項1記載の作業現場の危険予知装置。
【請求項3】
前記状態判定器は、前記警告信号の発生を決定するための閾値を外部からの操作で可変可能である、請求項1記載の作業現場の危険予知装置。
【請求項4】
前記右傾斜速度差分と比較される閾値と、前記左傾斜速度差分と比較される閾値とは、異なる値に設定可能である、請求項1記載の作業現場の危険予知装置。
【請求項5】
前記ボディー姿勢センサは、さらに高度計を備える、請求項1記載の作業現場の危険予知装置。
【請求項6】
監視対象の身体に装着可能なボディー装着帯と、前記ボディー装着帯に右フック用帯を介して連結された右フック構体と、前記ボディー装着帯に左フック用帯を介して連結された左フック構体を備えた装着具と、
前記ボディー装着帯に取り付けられ、鉛直面に対する自身のボディー傾斜速度を得るボディー姿勢センサと、
第1の鉛直面センサ、第1の加速度センサ、第1の演算器及び第1の送信器を有し、前記右フック構体又は前記右フック用帯のいずれかに取り付けられ、鉛直面に対する自身の第1の傾斜速度を得て、前記ボディー姿勢センサへ送信する右姿勢センサと、
第2の鉛直面センサ、第2の加速度センサ、第2の演算器及び第2の送信器を有し、前記左フック構体又は前記左フック用帯のいずれかに取り付けられ、鉛直面に対する自身の第2の傾斜速度を得て、前記ボディー姿勢センサへ送信する左姿勢センサと、
前記ボディー姿勢センサに設けられており、
前記第1の傾斜速度、前記第2の傾斜速度を受信する第1の受信器と、
前記ボディー傾斜速度と前記第1の傾斜速度の差に応じた右傾斜速度差分と、前記ボディー傾斜速度と前記第2の傾斜速度の差に応じた左傾斜速度差分とを得る第3の演算器と、
前記第3の演算器の演算結果に応じて、警告信号を発生する状態判定器と、そして、
前記右傾斜速度差分と前記左傾斜速度差分と外部へ送信する第3の送信器と、
前記第3の送信器からの前記右傾斜速度差分と前記左傾斜速度差分とを受信する第2の受信器を有し、受信したデータを送受信器でサーバに向けて送信する中継器とを有し、
前記第1の受信器は、前記第1の送信器と第2の送信器から第1の通信方式で受信する2チャンネルの受信器であり、
前記第2の受信器は、前記第1の通信方式とは異なり、送信頻度が前記第1の通信方式よりも低い第2の通信方式を採用していることを特徴する、
作業現場の危険予知システム。
【請求項7】
前記中継器は、
前記右傾斜速度差分と比較される第1の閾値と、前記左傾斜速度差分と比較される第2の閾値とを、異なる値で前記状態判定器に対して設定可能である、請求項6記載の作業現場の危険予知システム。
【請求項8】
前記中継器は、
携帯電話網を介して、データベースを構築するサーバへ接続されている、請求項6記載の作業現場の危険予知システム。
【請求項9】
前記サーバの前記データベースは、スマートフォーンを用いて参照可能である、請求項8記載の作業現場の危険予知システム。
【請求項10】
装着具が、作業員の身体に装着可能なボディー装着帯と、前記ボディー装着帯に右フック用帯を介して連結された右フック構体と、前記ボディー装着帯に左フック用帯を介して連結された左フック構体を備ええおり、
ボディー姿勢センサを前記ボディー装着帯に取り付け、鉛直面に対する自身のボディー傾斜速度を得、
右姿勢センサに、第1の鉛直面センサと第1の加速度センサ及び第1の演算器を設け、この右姿勢センサを前記右フック構体又は前記右フック用帯のいずれかに取り付け、鉛直面に対する自身の第1の傾斜速度を得て、前記ボディー姿勢センサへ送信するようにし、
左姿勢センサに、第2の鉛直面センサと第2の加速度センサ及び第2の演算器を設け、この左姿勢センサを前記左フック構体又は前記左フック用帯のいずれかに取り付け、鉛直面に対する自身の第2の傾斜速度を得て、前記ボディー姿勢センサへ送信するようにし、
前記ボディー姿勢センサに、受信器、第3の演算器、状態判定器、送信器を設けており、
前記第1の傾斜速度、前記第2の傾斜速度を受信し、
前記ボディー傾斜速度と前記第1の傾斜速度の差に応じた右傾斜速度差分と、前記ボディー傾斜速度と前記第2の傾斜速度の差に応じた左傾斜速度差分とを取得し、
前記第3の演算器の前記右傾斜速度差分及び又は左傾斜速度差分に応じて、警告信号を発生し、そして、前記右傾斜速度差分と前記左傾斜速度差分とを外部の中継器へ送信する、
ことを特徴する作業現場の危険予知方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、作業現場の危険予知装置、危険予知システム、危険予知方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
工事現場において、作業者による高所作業が行われる場合、作業者の落下を防止するために安全帯使用状況確認システムが開発されている。このシステムは、作業者の身体に直接装着される装着帯と、装着帯に一端が固定され他端にフックが設けられたロープを有する。
【0003】
フックには姿勢センサが取り付けられている。フックが、作業者により固定位置に係止されたとき、所定値以上の加速度が、姿勢センサにより検出される。検出装置は、前記所定値以上の加速度が得られた事象を、作業者がフックを固定具に引っ掛けたものとして判定する。
【0004】
このシステムは、作業内容に応じて、前記所定値以上の加速度が所定期間内に得られる回数を予め記憶している。このシステムは、前記回数が前記所定期間内に得られない場合は、適正にフックが係止されていないと判定する。
【先行技術文献】
【特許文献】
【0005】
特開2019-5425号公報
特開2019-67207号公報
特開2017-108822号公報
特開2017-93515号公報
特開2017-51271号公報
特開2020-56134号公報
特開2021-109015号公報
特開2022-139618号公報
特開2022-29791号公報
【発明の概要】
【0006】
作業内容として、建築物の外壁の清掃や塗装が行われる場合がある。この作業では、建築物の外壁に沿って、鉄パイプによる足場が組み立てられる。足場は、板状の歩行用板と、この歩行用板を支える鉄パイプと、鉄パイプ同士を連結する連結具などで構成される。
【0007】
作業員は、歩行用板の上に立ちながら、外壁の清掃、塗装、補修などを行う。このような作業においても安全のために作業者の落下防止用の対策が求められている。
【0008】
そこで本発明の実施形態では、早い時期に危険を予知することができる、作業現場の危険予知装置、危険予知システム、危険予知方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
一実施形態によれば、
監視対象の身体に装着可能なボディー装着帯と、前記ボディー装着帯に右フック用帯を介して連結された右フック構体と、前記ボディー装着帯に左フック用帯を介して連結された左フック構体を備えた装着具と、
前記ボディー装着帯に取り付けられたボディー姿勢センサと、
前記右フック構体又は前記右フック用帯のいずれかに取り付けられた右姿勢センサと、
前記左フック構体又は前記左フック用帯のいずれかに取り付けられた左姿勢センサと、
前記ボディー姿勢センサに設けられており、前記右姿勢センサと前記左姿勢センサとから無線により送信される右姿勢検出出力と左姿勢検出出力を受信する受信器と、
前記受信器で受信した前記右姿勢検出出力及び前記左姿勢検出出力と、前記ボディー姿勢センサで得られるボディー姿勢検出出力とを用いる演算器及び状態判定器であって、
前記ボディー姿勢センサの基準鉛直面に対する傾斜速度を基準とし、前記右姿勢センサの傾斜速度を前記基準鉛直面に対する右傾斜速度差分に補正し、
また前記ボディー姿勢センサの前記基準鉛直面に対する前記傾斜速度を基準とし、前記左姿勢センサの傾斜速度を前記基準鉛直面に対する左傾斜速度差分に補正し、
設定した期間内で、前記右傾斜速度差分の値が閾値以下の場合と、前記左傾斜速度差分の値が閾値以下の場合の少なくとも一方が成立する場合は、警告信号を出力する演算器及び状態判定器と、
を備える作業現場の危険予知装置が提供される。
【図面の簡単な説明】
【0010】
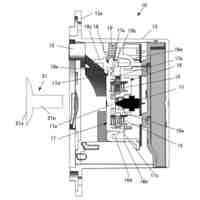
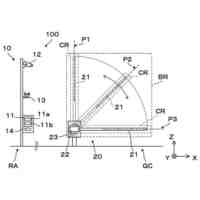
図1は本実施形態に係るシステムで使用されるフック構体の構成説明図である。
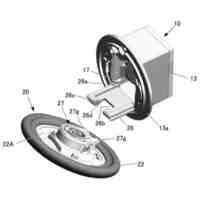
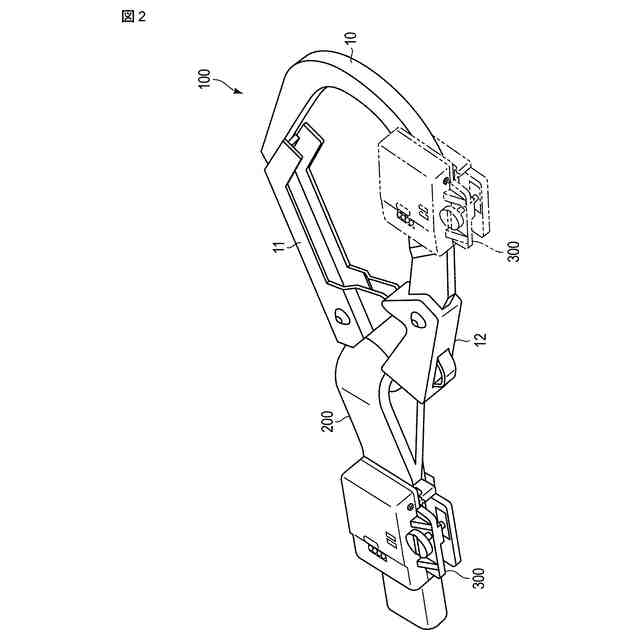
図2は本実施形態に係るシステムで使用されるフック構体であり、図1とは視点を変えて示す構成説明図である。
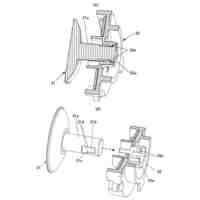
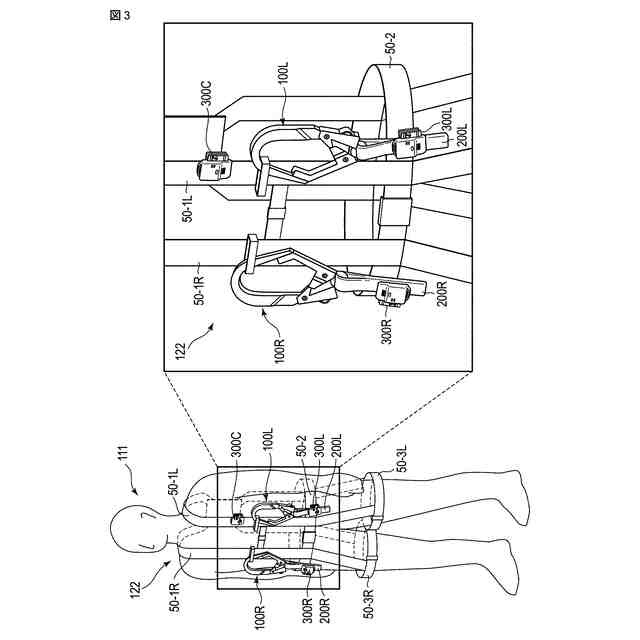
図3は本実施形態に係るシステムで使用される装着具の一部をさらに示す説明図である。
図4は本実施形態に係るシステムにおいて、右姿勢センサ及び左姿勢センサの姿勢検出を行う原理の一例を説明するために示した説明図である。
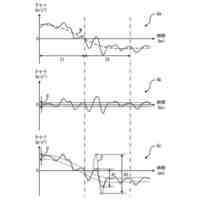
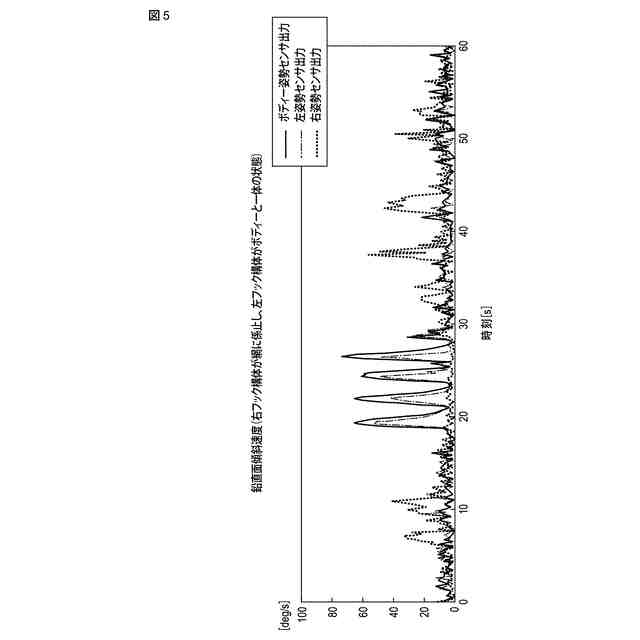
図5は本実施形態に係るシステムにおいて、右フック構体が綱(安全用係止具)に係止し、左フック構体がボディーと一体の場合において得られた、ボディー姿勢センサ、右姿勢センサ及び左姿勢センサから得られる鉛直面傾斜速度の検出信号例を示す説明図である。
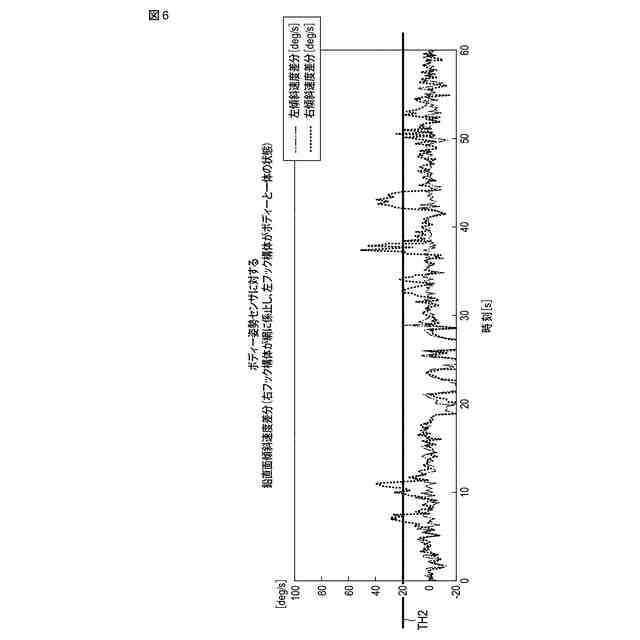
図6は本実施形態に係るシステムにおいて、右フック構体が綱(安全用係止具)に係止し、左フック構体がボディーと一体の場合において得られた、ボディー姿勢センサからの鉛直面傾斜速度に対する、右姿勢センサ及び左姿勢センサから得られる各鉛直面傾斜速度の検出信号を、差分演算しした結果に、さらに閾値を付加して示す説明図である。
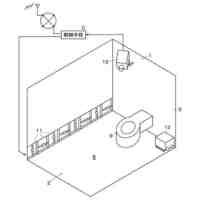
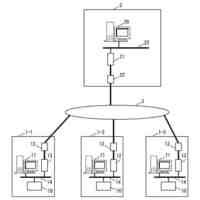
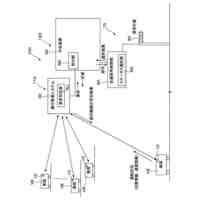
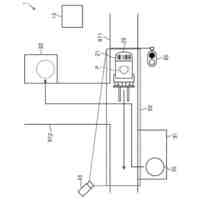
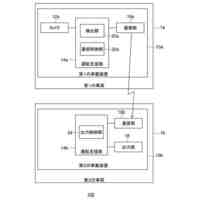
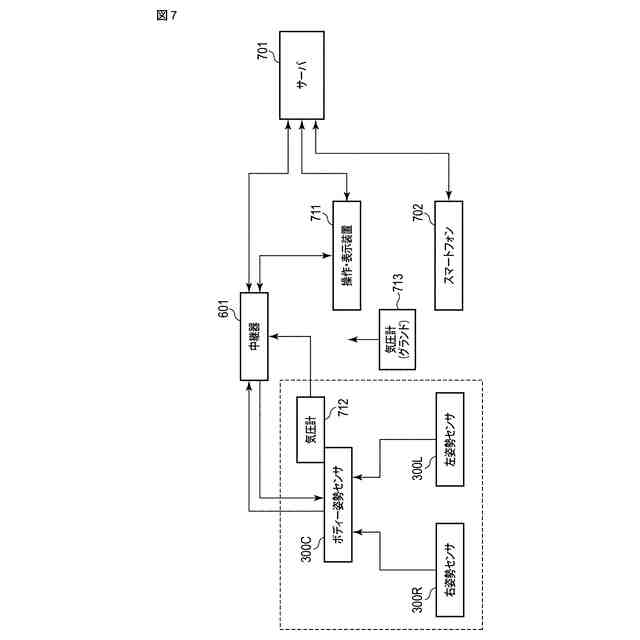
図7は本実施形態に係るシステムにおいて、装着具からの各姿勢センサの出力が、中継器に送信され、さらに中継器からサーバへ監視データが送信され、サーバの監視データがスマートフォーンでモニタ可能となっているシステム構成例を示す説明図である。
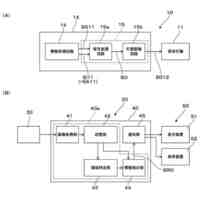
図8は本実施形態に係るシステムにおいて、ボディー姿勢センサ、右姿勢センサ及び左姿勢センサと、中継器601の内部構成例を示すと共に、サーバ701のデータベースを用いて、スマートフォーンへサービスを提供した例を示す説明図である。
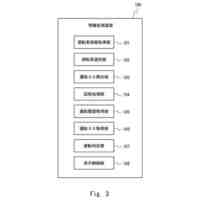
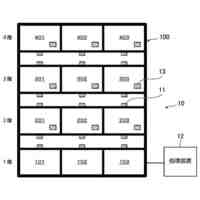
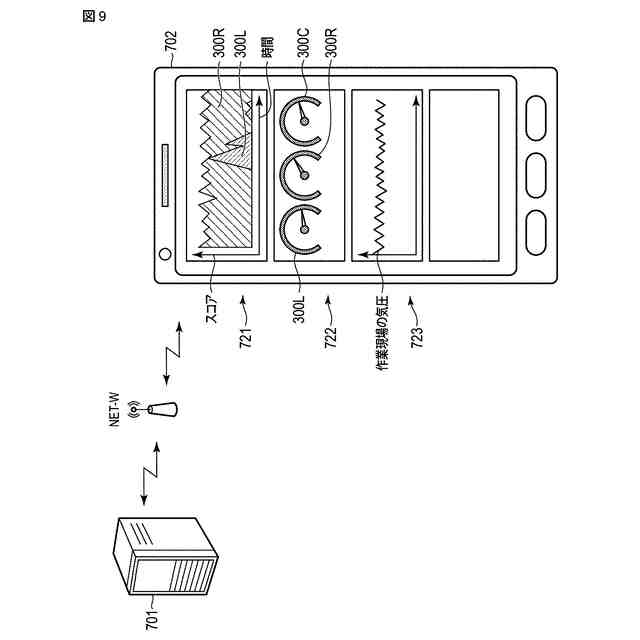
図9は、本システムのサーバにおけるデータベース例を示し、その説明とその利用方法を説明するための図である。
図10は、本システムのサーバにおけるデータベース例を示し、その説明とその利用方法を説明するための図である。
図11は、本システムのサーバにおける時系列データ記録例を示し、その説明とその利用方法の他の例を説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アクシス
作業現場の危険予知装置、危険予知システム、危険予知方法
5日前
日本精機株式会社
路面投影装置
1か月前
ニッタン株式会社
発信機
1か月前
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
13日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
11日前
TOA株式会社
拡声放送システム
1か月前
東京都公立大学法人
液滴検出装置
1か月前
トヨタ自動車株式会社
車両
12日前
株式会社JVCケンウッド
警報装置
1か月前
個人
乗り物の移動を支援する方法及び装置
1か月前
株式会社アジラ
データ転送システム
1か月前
アズビル株式会社
建物管理システム
2か月前
日本信号株式会社
信号情報システム
1か月前
日本信号株式会社
情報提供システム
1か月前
日本信号株式会社
交通信号制御システム
1か月前
株式会社JVCケンウッド
情報処理装置
2か月前
個人
現示内容に関する情報放送機能付き信号機
21日前
トヨタ自動車株式会社
回避動作判別装置
1か月前
ホーチキ株式会社
火災検出システム
1か月前
本田技研工業株式会社
情報提供装置
12日前
本田技研工業株式会社
情報提供装置
12日前
本田技研工業株式会社
運転評価装置
18日前
株式会社豊田自動織機
制御システム
1か月前
トヨタ自動車株式会社
障害物検知装置
2か月前
本田技研工業株式会社
保険料算出装置
18日前
ユニティガードシステム株式会社
警備監視システム
2か月前
トヨタ自動車株式会社
方法
1か月前
個人
注意喚起システム及び注意喚起装置
1か月前
大和ハウス工業株式会社
住環境管理設備
1か月前
古野電気株式会社
航路計画システム及び航路計画方法
3日前
トヨタ自動車株式会社
方法
25日前
能美防災株式会社
火災感知器窓部清掃システム
2か月前
株式会社アイシン
運転支援装置
5日前
トヨタ自動車株式会社
運転支援装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ