TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120557
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015418
出願日
2024-02-05
発明の名称
測位装置及び測位方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
19/34 20100101AFI20250808BHJP(測定;試験)
要約
【課題】復号の失敗によって測位時間が長くなるおそれを低減させることが可能な測位装置を提供すること。
【解決手段】衛星から送信される衛星信号を受信するアンテナと、受信した前記衛星信号に含まれる符号化された第1データを第1復号データに復号し、前記第1復号データの信頼度を算出する復号部と、前記第1復号データの信頼度が第1閾値以上であるか否かを判定する判定部と、前記第1復号データの信頼度が前記第1閾値以上である場合に、前記第1復号データに基づいて測位を行う測位部と、を備え、前記第1復号データの信頼度が前記第1閾値未満の場合、前記復号部は、前記第1データの少なくとも一部のビットを反転させた第1反転データを第1反転復号データに復号し、前記測位部は、前記第1反転復号データに基づいて測位を行う、測位装置。
【選択図】図1
特許請求の範囲
【請求項1】
衛星から送信される衛星信号を受信するアンテナと、
受信した前記衛星信号に含まれる符号化された第1データを第1復号データに復号し、前記第1復号データの信頼度を算出する復号部と、
前記第1復号データの信頼度が第1閾値以上であるか否かを判定する判定部と、
前記第1復号データの信頼度が前記第1閾値以上である場合に、前記第1復号データに基づいて測位を行う測位部と、を備え、
前記第1復号データの信頼度が前記第1閾値未満の場合、
前記復号部は、前記第1データの少なくとも一部のビットを反転させた第1反転データを第1反転復号データに復号し、
前記測位部は、前記第1反転復号データに基づいて測位を行う、測位装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1において、
前記復号部は、前記第1反転復号データの信頼度を算出し、
前記判定部は、前記第1反転復号データの信頼度が前記第1閾値以上であるか否かを判定し、
前記測位部は、前記第1反転復号データの信頼度が前記第1閾値以上である場合に、前記第1反転復号データに基づいて測位を行う、測位装置。
【請求項3】
請求項1において、
受信した前記衛星信号には、符号化された第2データが含まれ、
前記第1データは、前記第2データに続くデータであり、
前記復号部は、前記第2データを第2復号データに復号し、前記第2復号データの信頼度を算出し、
前記判定部は、前記第2復号データの信頼度が第2閾値以上であるか否かを判定し、
前記第1復号データの信頼度が前記第1閾値未満であって、かつ、前記第2復号データの信頼度が前記第2閾値以上である場合、
前記復号部は、前記第1反転データを前記第1反転復号データに復号し、
前記測位部は、前記第1反転復号データと、前記第2復号データと、に基づいて測位を行う、測位装置。
【請求項4】
請求項1において、
受信した前記衛星信号には、符号化された連続する複数のデータが含まれ、
前記第1データは、前記複数のデータに続くデータであり、
前記復号部は、前記複数のデータを複数の復号データに復号し、前記複数の復号データの各々の信頼度を算出し、
前記判定部は、前記複数の復号データの各々の信頼度が第2閾値以上であるか否かを判定し、
前記第1復号データの信頼度が前記第1閾値未満であって、かつ、前記複数の復号データの各々の信頼度が前記第2閾値以上である場合、
前記復号部は、前記第1反転データを前記第1反転復号データに復号し、
前記測位部は、前記第1反転復号データと、前記複数の復号データの少なくとも1つと、に基づいて測位を行う、測位装置。
【請求項5】
請求項3又は4において、
前記第2閾値は、前記第1閾値よりも高い、測位装置。
【請求項6】
請求項5において、
受信した前記衛星信号には、符号化された第3データが含まれ、
前記第3データは、前記第1データに続くデータであり、
前記第1反転復号データの信頼度が前記第1閾値以上である場合、
前記復号部は、前記第3データの各ビットを反転した第3反転データを第3反転復号データに復号し、
前記測位部は、前記第1反転復号データと、前記第3反転復号データと、に基づいて測位を行う、測位装置。
【請求項7】
請求項6において、
前記復号部は、前記第3反転復号データの信頼度を算出し、
前記判定部は、前記第3反転復号データの信頼度が前記第1閾値以上であるか否かを判定し、
前記測位部は、前記第3反転復号データの信頼度が前記第1閾値以上である場合に、前記第1反転復号データと、前記第3反転復号データと、に基づいて測位を行う、測位装置。
【請求項8】
請求項7において、
前記測位部は、前記第3反転復号データの信頼度が前記第1閾値未満である場合に、前記第1反転復号データと前記第3反転復号データとに基づく測位を行わない、測位装置。
【請求項9】
請求項1において、
前記復号部は、ビタビ演算に基づいて、前記第1データを前記第1復号データに復号する、測位装置。
【請求項10】
受信した衛星信号に含まれる符号化された第1データを第1復号データに復号し、前記第1復号データの信頼度を算出する復号工程と、
前記第1復号データの信頼度が第1閾値以上であるか否かを判定する判定工程と、
前記第1復号データの信頼度が前記第1閾値以上である場合に、前記第1復号データに基づいて測位を行う測位工程と、を含み、
前記第1復号データの信頼度が前記第1閾値未満の場合、
前記復号工程では、前記第1データの少なくとも一部のビットを反転させた第1反転データを第1反転復号データに復号し、
前記測位工程では、前記第1反転復号データに基づいて測位を行う、測位方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測位装置及び測位方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、航法メッセージを搬送する衛星信号を受信し、受信した信号を復号し、航法メッセージの搬送データ単位で、復号したデータを誤り検出して誤りを検出したビットについて誤りを訂正し、復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合し、照合の結果に基づいて、復号の正否を判定する復号方法が記載されている。特許文献1に記載の復号方法によれば、通常の誤り検出処理に加え、誤り検出処理の結果を繰り返し搬送されるデータ部分同士で照合することにより、精度の高い誤り検出を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2013-57525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の復号方法では、ランダムな誤りに対して誤りを訂正することできるが、受信した信号の位相がある時点から反転した場合は誤りを訂正することができずに復号に失敗し、復号に失敗した信号から1周期分全ての信号の復号を再度行う必要があるため測位時間が長くなってしまう。
【課題を解決するための手段】
【0005】
本発明に係る測位装置の一態様は、
衛星から送信される衛星信号を受信するアンテナと、
受信した前記衛星信号に含まれる符号化された第1データを第1復号データに復号し、前記第1復号データの信頼度を算出する復号部と、
前記第1復号データの信頼度が第1閾値以上であるか否かを判定する判定部と、
前記第1復号データの信頼度が前記第1閾値以上である場合に、前記第1復号データに基づいて測位を行う測位部と、を備え、
前記第1復号データの信頼度が前記第1閾値未満の場合、
前記復号部は、前記第1データの少なくとも一部のビットを反転させた第1反転データを第1反転復号データに復号し、
前記測位部は、前記第1反転復号データに基づいて測位を行う。
【0006】
本発明に係る測位方法の一態様は、
受信した衛星信号に含まれる符号化された第1データを第1復号データに復号し、前記第1復号データの信頼度を算出する復号工程と、
前記第1復号データの信頼度が第1閾値以上であるか否かを判定する判定工程と、
前記第1復号データの信頼度が前記第1閾値以上である場合に、前記第1復号データに基づいて測位を行う測位工程と、を含み、
前記第1復号データの信頼度が前記第1閾値未満の場合、
前記復号工程では、前記第1データの少なくとも一部のビットを反転させた第1反転データを第1反転復号データに復号し、
前記測位工程では、前記第1反転復号データに基づいて測位を行う。
【図面の簡単な説明】
【0007】
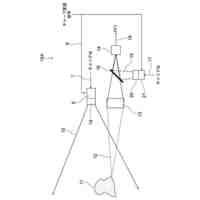
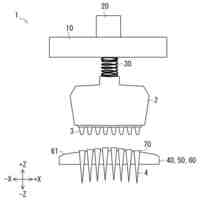
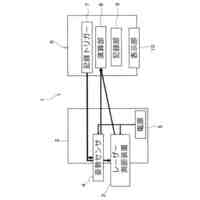
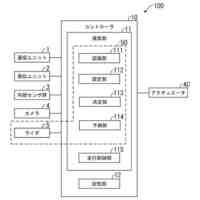
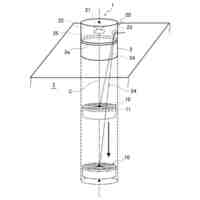
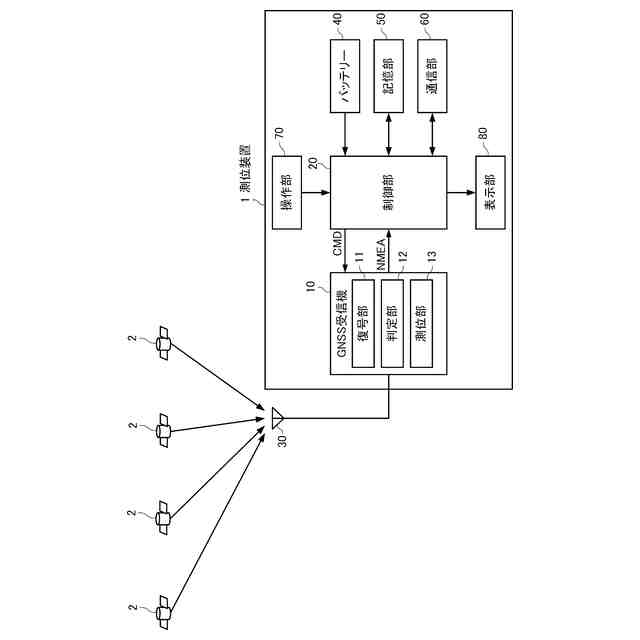
本実施形態の測位装置の構成例を示す図。
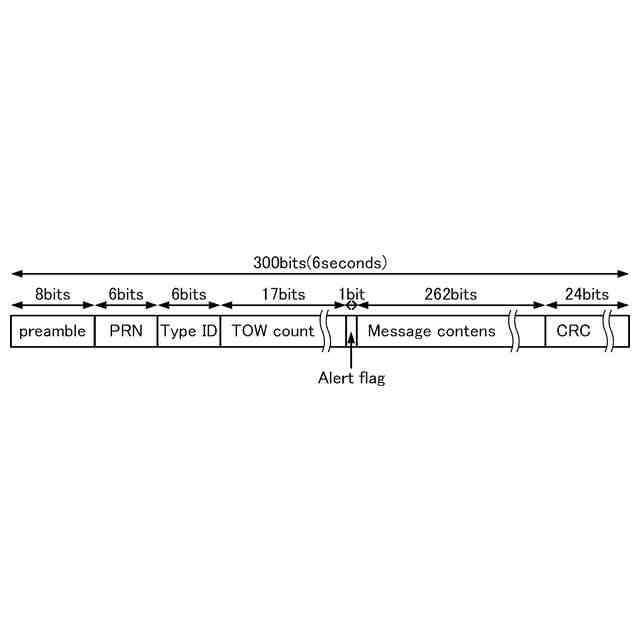
GPSにおけるL5帯の航法メッセージの構成を示す図。
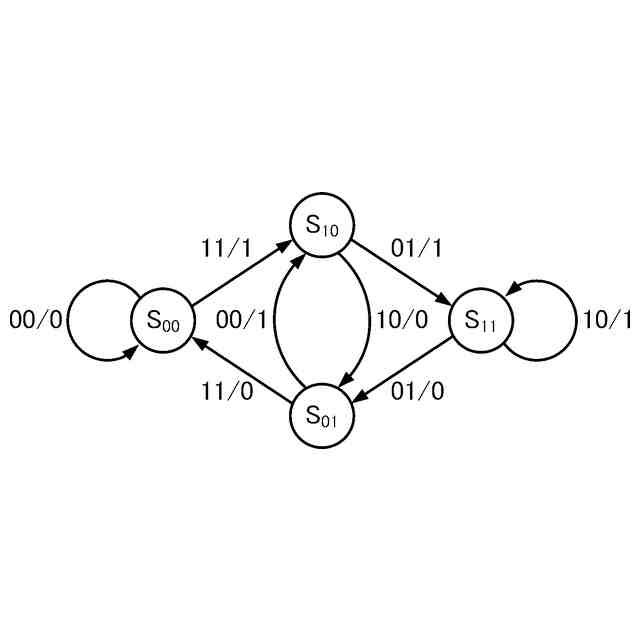
畳み込み符号化のための状態遷移の一例を示す図。
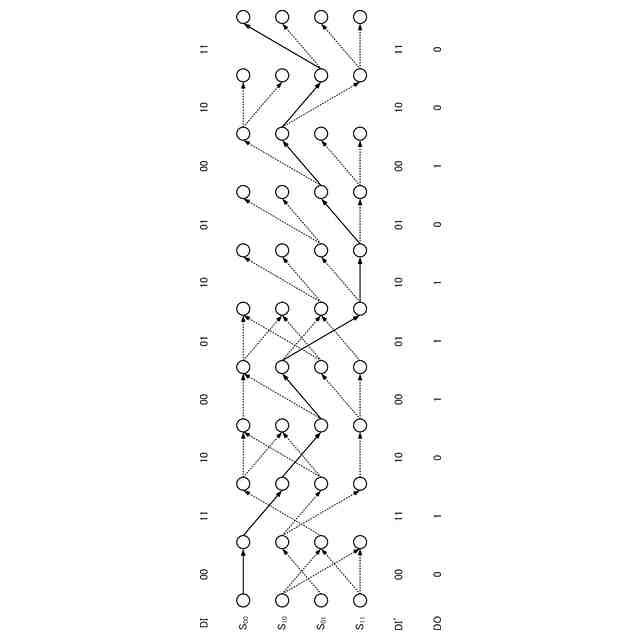
ビタビ演算によって選択される状態遷移の一例を示す図。
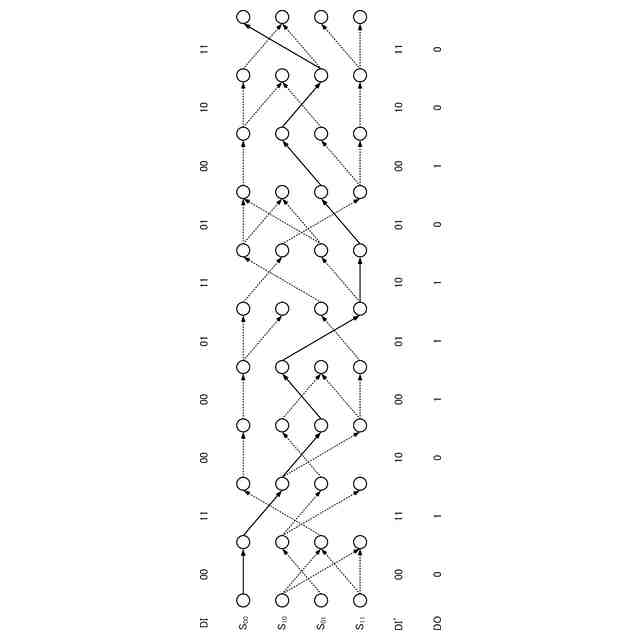
ビタビ演算によって選択される状態遷移の他の一例を示す図。
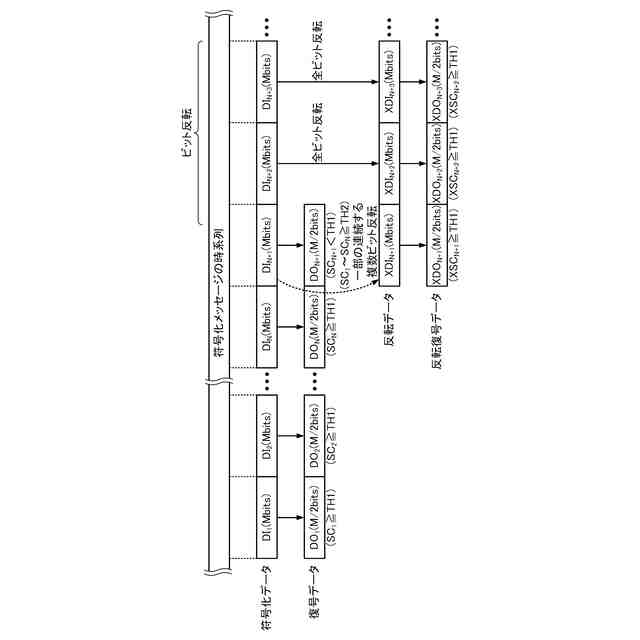
復号されるデータの時系列の一例を示す図。
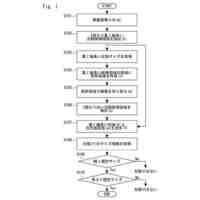
本実施形態の測位方法の手順の一例を示すフローチャート図。
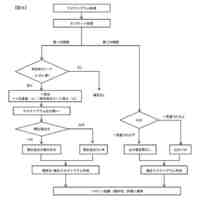
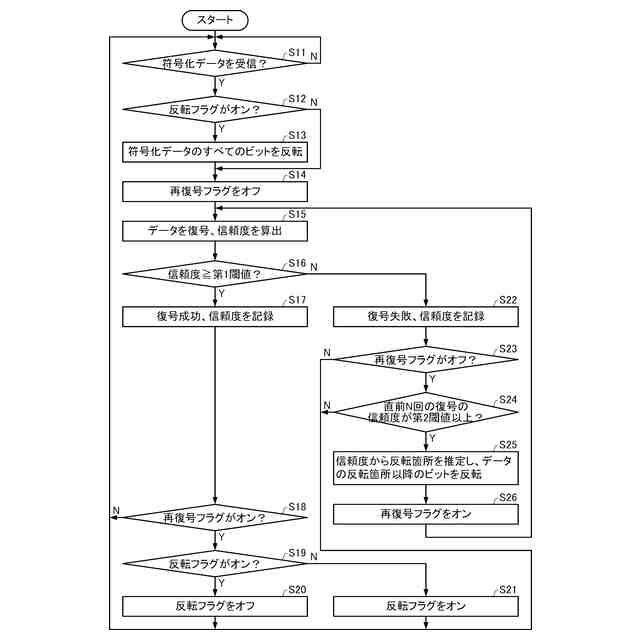
図7における復号工程及び判定工程の詳細な手順の一例を示すフローチャート図。
【発明を実施するための形態】
【0008】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0009】
1.実施形態
1-1.測位装置の構成
図1は、本実施形態の測位装置1の構成例を示す図である。測位装置1は、以下に詳細に説明するように、衛星2から送信される衛星信号を受信し、受信した衛星信号に基づいて測位を行うものである。
【0010】
図1に示すように、本実施形態の測位装置1は、GNSS受信機10、制御部20、アンテナ30、バッテリー40、記憶部50、通信部60、操作部70及び表示部80を備える。ただし、測位装置1は、図1の構成要素の一部を省略又は変更し、あるいは、他の構成要素を追加した構成としてもよい。なお、測位装置1は、構成要素の一部又は全部が物理的に分離されていてもよいし、一体化されていてもよい。例えば、GNSS受信機10と制御部20はそれぞれ別個のICで実現されていてもよいし、GNSS受信機10と制御部20は1チップのICとして実現されていてもよい。ICは、Integrated Circuitの略称である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
力変換器
17日前
三菱電機株式会社
計測器
11日前
横浜ゴム株式会社
音響窓
19日前
株式会社辰巳菱機
システム
5日前
日置電機株式会社
測定装置
18日前
IPU株式会社
距離検出装置
17日前
株式会社FRPカジ
FRP装置
7日前
日本精工株式会社
分注装置
3日前
大和製衡株式会社
組合せ計量装置
7日前
学校法人立命館
液面レベルセンサ
4日前
株式会社カワタ
サンプリング装置
今日
富士レビオ株式会社
嵌合システム
10日前
アズビル株式会社
火炎状態判定装置
18日前
三菱マテリアル株式会社
温度センサ
3日前
富士電機株式会社
半導体パッケージ
13日前
本多電子株式会社
超音波ソナー装置
12日前
戸田建設株式会社
測量機
3日前
三和テッキ株式会社
架線の高さ、偏位測定装置
5日前
トヨタ自動車株式会社
表面傷の検査方法
19日前
東ソー株式会社
クロマトグラムの形状判定方法
13日前
トヨタ自動車株式会社
データの補正方法
12日前
株式会社エイアンドティー
電解質分析装置
3日前
大豊建設株式会社
鉛直精度測定装置
7日前
愛知時計電機株式会社
超音波流量計
17日前
本田技研工業株式会社
物体検出装置
3日前
アクト電子株式会社
レーザドップラ速度計
7日前
本田技研工業株式会社
外界認識装置
7日前
大豊建設株式会社
直線精度測定装置
7日前
ミネベアミツミ株式会社
ひずみゲージ
18日前
株式会社エス・テイ・ジャパン
試料加工部材
3日前
株式会社アイシン
運転支援装置
12日前
株式会社アイシン
運転支援装置
12日前
株式会社アイシン
運転支援装置
13日前
DICプラスチック株式会社
検体採取具
18日前
株式会社キリウ
溶湯液位測定装置
3日前
住友ゴム工業株式会社
脱輪抑止システム
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ