TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025120837
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015962
出願日
2024-02-05
発明の名称
駆動回路
出願人
ローム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H02M
1/08 20060101AFI20250808BHJP(電力の発電,変換,配電)
要約
【課題】出力端子の電圧の変化の開始を簡易に検出すること。
【解決手段】ハイサイドトランジスタの駆動回路は、入力信号の第1エッジに応じて生成されたローレベルの第1パルス信号を伝送する伝送ラインL1の電圧VL1と入力信号の第2エッジに応じて生成されたローレベルの第2パルス信号を伝送する伝送ラインL2の電圧VL2とがともに第1閾値電圧よりも低下している場合に、電圧Vsの変化が開始したことを検出するマスク回路54を備える。
【選択図】図18
特許請求の範囲
【請求項1】
ハイサイドトランジスタの駆動回路であって、
入力信号の第1エッジに応じて生成されたローレベルの第1パルス信号を伝送する第1伝送ラインの第1電圧と前記入力信号の第2エッジに応じて生成されたローレベルの第2パルス信号を伝送する第2伝送ラインの第2電圧とがともに第1閾値電圧よりも低下している場合に、ハイサイド接地電位の変化が開始したことを検出するマスク回路を備える、駆動回路。
続きを表示(約 1,300 文字)
【請求項2】
前記第1パルス信号を検出して第1検出信号を出力する第1信号検出回路と、
前記第2パルス信号を検出して第2検出信号を出力する第2信号検出回路と、
前記第1検出信号及び前記第2検出信号に基づいて、前記入力信号を復元する復元回路と、
を更に備え、
前記マスク回路は、前記ハイサイド接地電位の変化が開始したことを検出したことに応じて、マスク信号を前記復元回路に出力し、
前記復元回路は、前記マスク信号によって、前記第1検出信号及び前記第2検出信号をマスクする、請求項1に記載の駆動回路。
【請求項3】
前記マスク回路は、
前記第1電圧が急低下したか否かを判定する第1判定回路と、
前記第2電圧が急低下したか否かを判定する第2判定回路と、
前記第1電圧と前記第2電圧とがともに急低下したと判定された場合に、前記ハイサイド接地電位の変化が開始したことを検出して前記マスク信号を生成するマスク生成回路と、
を備え、
前記第1判定回路は、前記第1電圧が前記第1閾値電圧よりも大きい第2閾値電圧よりも低下してから所定時間が経過する前に前記第1電圧が前記第1閾値電圧よりも低下した場合に、前記第1電圧が急低下したと判定し、
前記第2判定回路は、前記第2電圧が前記第2閾値電圧よりも低下してから前記所定時間が経過する前に前記第2電圧が前記第1閾値電圧よりも低下した場合に、前記第2電圧が急低下したと判定する、請求項2に記載の駆動回路。
【請求項4】
前記第1判定回路は、
前記第1電圧が前記第1閾値電圧よりも低い場合にハイレベルの第1出力信号を出力する第1インバータ回路と、
前記第1電圧が前記第2閾値電圧よりも低い場合にハイレベルの第2出力信号を出力する第2インバータ回路と、
前記第2インバータ回路の後段に設けられ、前記第2出力信号を前記所定時間だけ遅延する第1遅延回路と、
前記第1遅延回路の後段に設けられ、前記第1遅延回路によって遅延された前記第2出力信号の電圧レベルを反転して第3出力信号を出力する第3インバータ回路と、
前記第1出力信号と前記第2出力信号と前記第3出力信号との論理積演算を行う第1論理積回路と、
を備える、請求項3に記載の駆動回路。
【請求項5】
前記第2判定回路は、
前記第2電圧が前記第1閾値電圧よりも低い場合にハイレベルの第4出力信号を出力する第4インバータ回路と、
前記第2電圧が前記第2閾値電圧よりも低い場合にハイレベルの第5出力信号を出力する第5インバータ回路と、
前記第5インバータ回路の後段に設けられ、前記第5出力信号を前記所定時間だけ遅延する第2遅延回路と、
前記第2遅延回路の後段に設けられ、前記第2遅延回路によって遅延された前記第5出力信号の電圧レベルを反転して第6出力信号を出力する第6インバータ回路と、
前記第4出力信号と前記第5出力信号と前記第6出力信号との論理積演算を行う第2論理積回路と、
を備える、請求項3又は請求項4に記載の駆動回路。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動回路に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、直列に接続された上側スイッチング素子及び下側スイッチング素子のうちの、上側スイッチング素子をオンオフ制御する上側ドライバが記載されている。例えば、特許文献1に記載の上側ドライバにおいては、P端子とN端子との間に上側スイッチング素子と下側スイッチング素子とが直列に接続され、上側スイッチング素子と下側スイッチング素子とが接続されるノードが出力端子に接続されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/131157号
【0004】
[概要]
下側スイッチング素子がオンからオフに切り替えられると、上記出力端子の電圧が上昇する。このため、上記電圧を直接モニタするためには、高耐圧の回路が必要となる。
【0005】
本開示は、出力端子の電圧の変化の開始を簡易に検出することが可能な駆動回路を説明する。
【0006】
本開示の一側面に係る駆動回路は、ハイサイドトランジスタの駆動回路であって、入力信号の第1エッジに応じて生成されたローレベルの第1パルス信号を伝送する第1伝送ラインの第1電圧と入力信号の第2エッジに応じて生成されたローレベルの第2パルス信号を伝送する第2伝送ラインの第2電圧とがともに第1閾値電圧よりも低下している場合に、ハイサイド接地電位の変化が開始したことを検出するマスク回路を備える。
【図面の簡単な説明】
【0007】
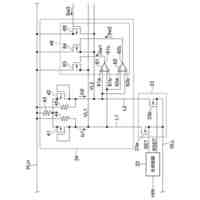
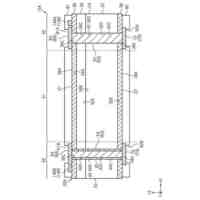
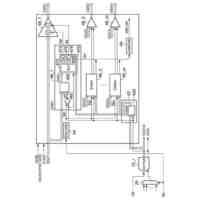
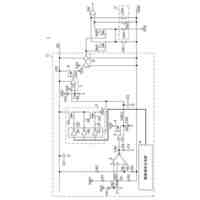
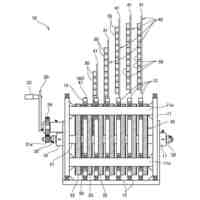
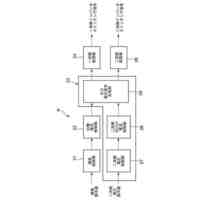
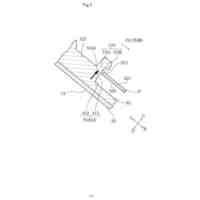
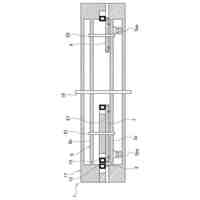
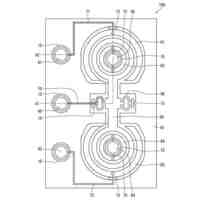
図1は、一実施形態に係るハイサイドトランジスタの駆動回路を含むIPM(Intelligent Power Module)の例示的な内部構成を示す図である。
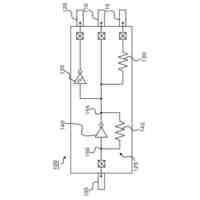
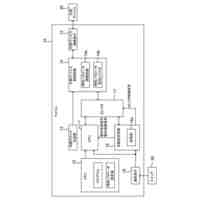
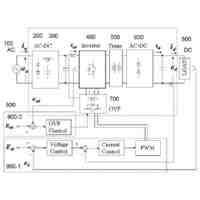
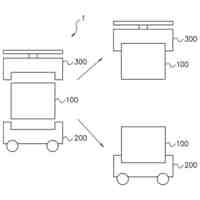
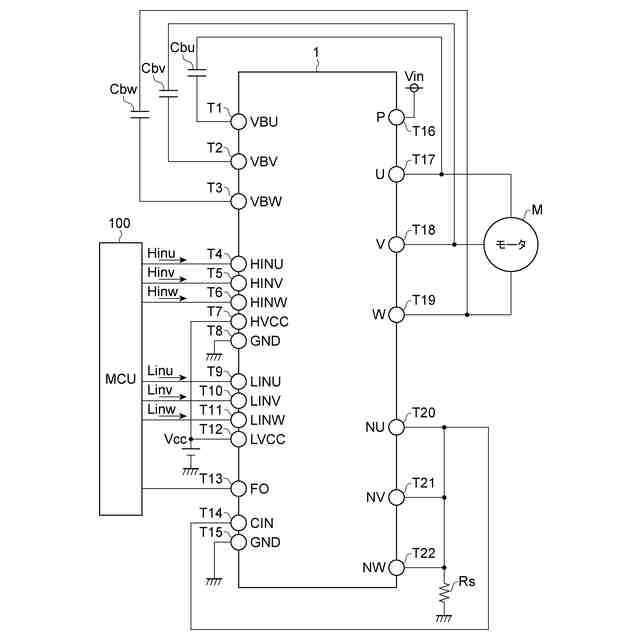
図2は、図1に示されるIPMの適用例を示す図である。
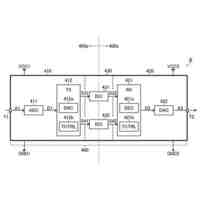
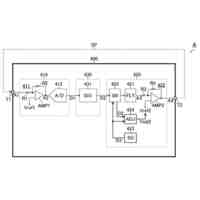
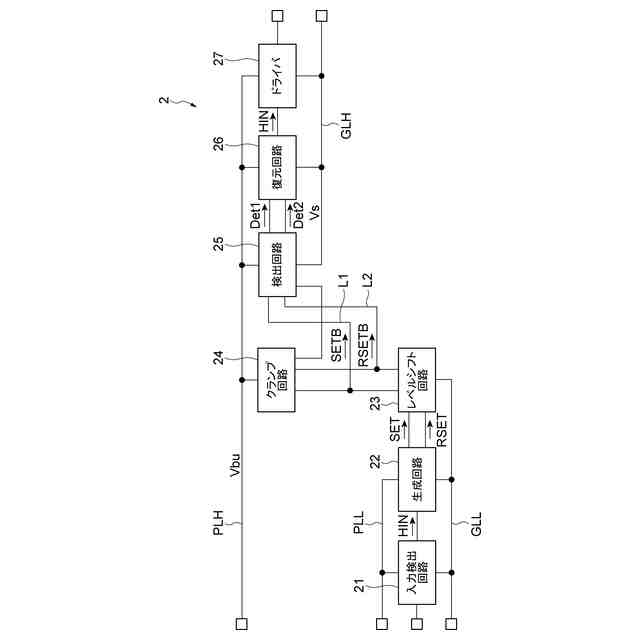
図3は、図1に示されるハイサイドトランジスタの駆動回路を概略的に説明するための図である。
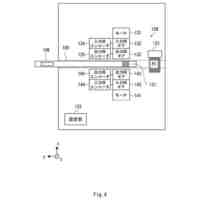
図4は、図3に示される検出回路を概略的に説明するための図である。
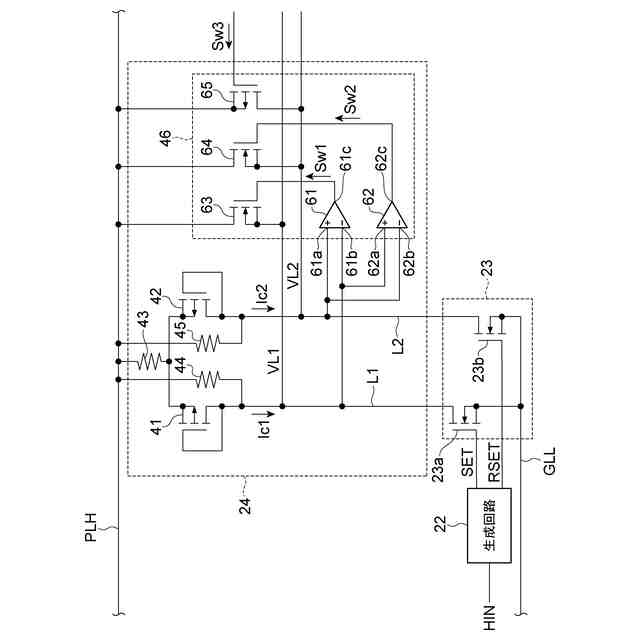
図5は、図3に示されるレベルシフト回路及びクランプ回路の例示的な回路構成を示す図である。
図6は、上回生時における電圧変化を説明するための図である。
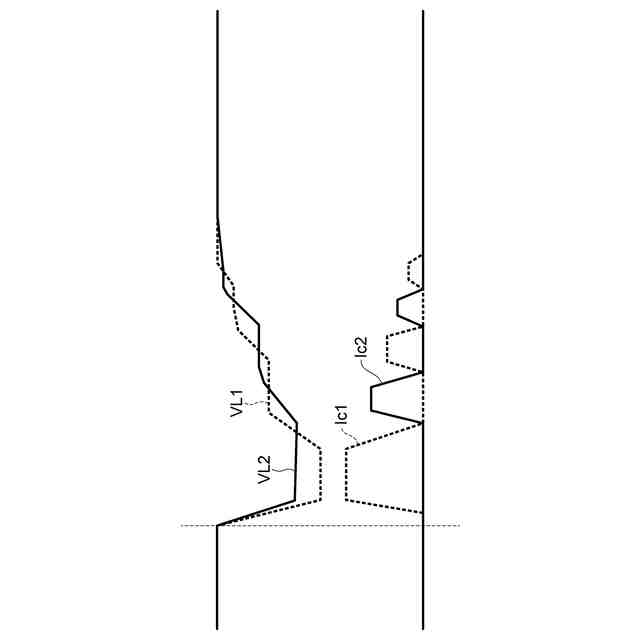
図7は、図5に示される差動対回路の動作を説明するための図である。
図8は、図5に示される急速充電回路の動作を説明するための図である。
図9は、図5に示されるクランプ回路の、下回生時における動作を説明するための図である。
図10は、クランプ回路及び信号検出回路の別の回路構成を示す図である。
図11は、図4に示される信号検出回路の例示的な回路構成を示す図である。
図12は、図11に示される信号検出回路の、入力信号が入力されていない場合の動作を説明するための図である。
図13は、図11に示される信号検出回路の、入力信号が入力された場合の動作を説明するための図である。
図14は、図4に示される低下検出回路の例示的な回路構成を示す図である。
図15は、図14に示される低下検出回路の動作を説明するための図である。
図16は、信号検出を説明するための図である。
図17は、図14に示される低下検出回路が用いられない場合の信号検出を説明するための図である。
図18は、図4に示されるマスク回路の例示的な回路構成を示す図である。
図19は、図18に示されるマスク回路の動作を説明するための図である。
図20は、図18に示されるマスク回路による変化検出を説明するための図である。
図21は、遅延回路の例示的な回路構成を示す図である。
図22は、図21に示される遅延回路の遅延動作を説明するための図である。
図23は、遅延回路の別の例示的な回路構成を示す図である。
図24は、図23に示される遅延回路の遅延動作を説明するための図である。
図25は、図21に示される遅延回路における遅延時間のばらつきを説明するための図である。
図26は、遅延回路の更に別の例示的な回路構成を示す図である。
図27は、図26に示される遅延回路における遅延時間のばらつきを説明するための図である。
【0008】
[詳細な説明]
以下、図面を参照しながら本開示の実施形態が詳細に説明される。なお、図面の説明において同一要素には同一符号が付され、重複する説明は省略される。
【0009】
図1及び図2を参照しながら、一実施形態に係るハイサイドトランジスタの駆動回路を含むIPMを説明する。図1は、一実施形態に係るハイサイドトランジスタの駆動回路を含むIPMの例示的な内部構成を示す図である。図2は、図1に示されるIPMの適用例を示す図である。
【0010】
図1及び図2に示されるIPM1は、パワー素子とゲートドライバとを1パッケージに封入したデバイスである。IPM1のパッケージとしては、例えば、DIP(Dual In-line Package)が用いられる。IPM1のパッケージとして、HSDIP(Shrink Dual In-line Package with Heat Sink)及びSMD(Surface Mount Device)などの任意のパッケージが用いられ得る。IPM1は、例えば、MCU(Micro Control Unit)100によって制御され、モータMを駆動する。モータMの例としては、3相DC(Direct Current)ブラシレスモータが挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
遅延回路
1日前
ローム株式会社
駆動回路
1日前
ローム株式会社
駆動回路
1日前
ローム株式会社
駆動回路
1日前
ローム株式会社
電流センサ
今日
ローム株式会社
差動増幅回路
1日前
ローム株式会社
オペアンプ回路
11日前
ローム株式会社
半導体集積回路
4日前
ローム株式会社
窒化物半導体装置
今日
ローム株式会社
半導体集積回路装置
4日前
ローム株式会社
A/Dコンバータ回路
5日前
ローム株式会社
駆動装置及び送受信装置
5日前
ローム株式会社
コンパレータ回路、電源回路
1日前
ローム株式会社
差動アンプおよび半導体装置
4日前
ローム株式会社
半導体素子及びその製造方法
4日前
ローム株式会社
信号伝達装置、電子機器、車両
6日前
ローム株式会社
昇圧回路及び不揮発性メモリ装置
5日前
ローム株式会社
昇圧回路及び不揮発性メモリ装置
5日前
ローム株式会社
パラメータ設定装置及びパラメータ設定方法
4日前
ローム株式会社
信号伝達装置、電子機器、車両、パラメータ調整方法
5日前
ローム株式会社
MEMS振動子、MEMS共振器およびそれらの製造方法
今日
個人
充電制御システム
12日前
ニデック株式会社
モータ
26日前
個人
発電装置
20日前
個人
電流制御形AC-DC電源
19日前
株式会社ナユタ
電源装置
12日前
個人
ステッピングモータ実習装置
1か月前
キヤノン株式会社
電源装置
20日前
スズキ株式会社
移動システム
12日前
カヤバ株式会社
モータ制御装置
15日前
サンデン株式会社
電力変換装置
27日前
カヤバ株式会社
モータ制御装置
15日前
サンデン株式会社
電力変換装置
27日前
トヨタ自動車株式会社
駆動装置
22日前
ダイハツ工業株式会社
グロメット
11日前
個人
回転力発生装置
18日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ