TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121178
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016467
出願日
2024-02-06
発明の名称
車両の走行制御装置
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/02 20120101AFI20250812BHJP(車両一般)
要約
【課題】リスク軽減機能の作動時に、環状交差点での交通流の乱れや他の交通参加者との接触・衝突のリスクを低減する。
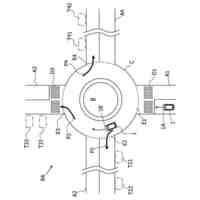
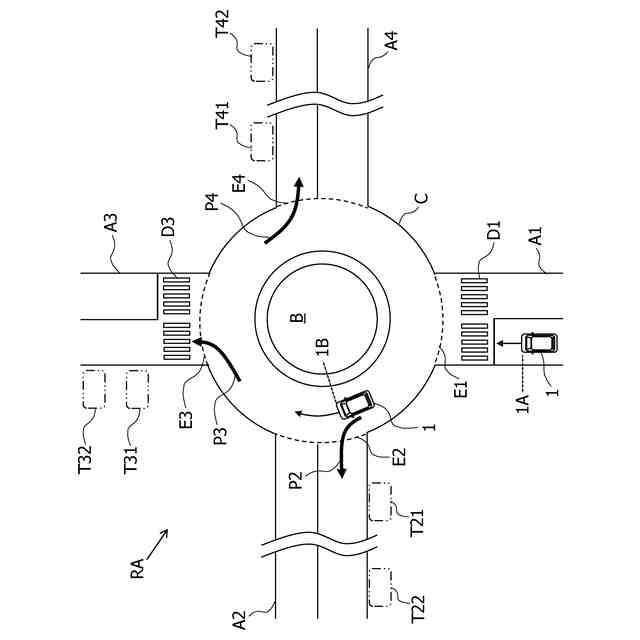
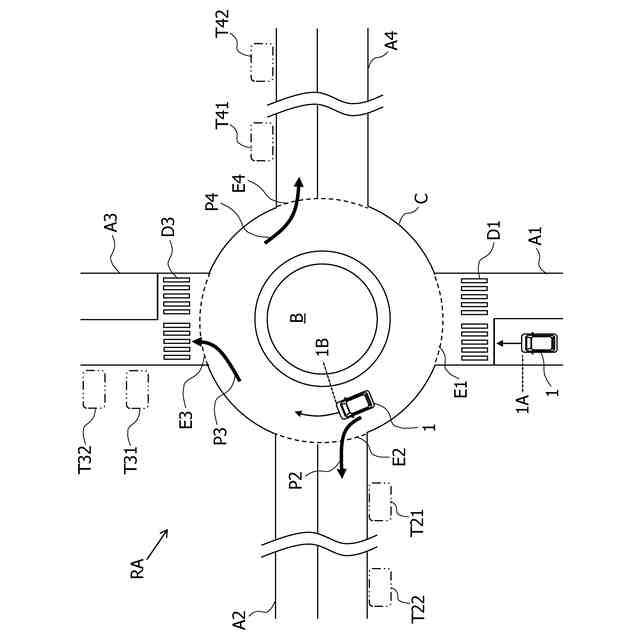
【解決手段】遠隔監視・遠隔操作による自動走行の継続が困難な状況になった場合に、車両1を目標停止位置に停止させるリスク軽減制御を実行するリスク軽減機能RMFを有する自動運行装置は、自動走行中にRMFの作動に備えて、車両1の位置情報および地図情報に基づき目標停止位置候補の探索を実行し、自動走行の目標経路とは異なる経路に位置する目標停止位置候補を含む複数の目標停止位置候補T21~T42を設定し、目標経路上に環状交差点RAが存在する場合は環状交差点RA外に目標停止位置候補T21~T42を設定し、環状交差点RA近傍または環状交差点RA内においてRMFが作動する場合、複数の目標停止位置候補T21~T42の中から目標停止位置を選択するように構成されている。
【選択図】図4
特許請求の範囲
【請求項1】
遠隔監視・遠隔操作による自動走行を実行するための自動運行装置を備えた車両の走行制御装置であって、
遠隔監視・遠隔操作による自動走行の継続が困難な状況になった場合に、前記車両を目標停止位置に停止させるリスク軽減制御を実行するリスク軽減機能(RMF)を有するものにおいて、
前記自動運行装置は、
前記自動走行中に、前記RMFの作動に備えて、前記車両の位置情報および地図情報に基づき、目標停止位置候補の探索を実行し、
前記自動走行の目標経路とは異なる経路に位置する目標停止位置候補を含む複数の目標停止位置候補を設定し、前記目標経路上に環状交差点が存在する場合は前記環状交差点外に目標停止位置候補を設定し、
環状交差点近傍または前記環状交差点内において前記RMFが作動する場合、前記複数の目標停止位置候補の中から目標停止位置を選択するように構成されている、車両の走行制御装置。
続きを表示(約 960 文字)
【請求項2】
前記複数の目標停止位置候補は、前記環状交差点の出口から延びる複数の道路に設定される、請求項1に記載の車両の走行制御装置。
【請求項3】
前記環状交差点の出口から延びる前記複数の道路のそれぞれに、複数の目標停止位置候補が設定される、請求項2に記載の車両の走行制御装置。
【請求項4】
前記複数の目標停止位置候補のそれぞれについて優先順位を設定し、前記複数の目標停止位置候補の中から最も優先順位の高い目標停止位置候補を、前記目標停止位置として選択するように構成され、
前記優先順位は、前記環状交差点の出口から目標停止位置候補までの距離が短いほど高い、請求項2に記載の車両の走行制御装置。
【請求項5】
前記環状交差点の出口の先に横断歩道が設置されていない道路に設定された目標停止位置候補の優先順位は、前記環状交差点の出口の先に横断歩道が設置された道路に設定された目標停止位置候補の優先順位よりも高い、請求項4に記載の車両の走行制御装置。
【請求項6】
前記環状交差点近傍において前記RMFが作動する場合、前記車両に最寄りの前記環状交差点の入口から前記環状交差点の出口までの距離が短いほど、前記出口から延びる道路に設定された目標停止位置候補の優先順位を高くする、請求項5に記載の車両の走行制御装置。
【請求項7】
前記環状交差点内において前記RMFが作動する場合、前記車両が所定の横加速度以内で前記環状交差点から退出可能な複数の出口のうち、前記車両から出口までの距離が短いほど、当該出口の先に設定された目標停止位置候補の優先順位を高くする、請求項5に記載の車両の走行制御装置。
【請求項8】
前記目標経路に位置する目標停止位置候補の優先順位は、前記目標経路とは異なる経路に位置する目標停止位置候補の優先順位よりも高い、請求項5に記載の車両の走行制御装置。
【請求項9】
環状交差点近傍または前記環状交差点内において前記RMFが作動する場合、前記環状交差点の環道の側端に沿って前記車両が走行するように前記目標経路を変更する、請求項1から8のいずれか一項に記載の車両の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の走行制御装置に関し、さらに詳しくは、遠隔監視・遠隔操作による自動走行中の車両のリスク軽減機能に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
遠隔監視・遠隔操作型の自動運行装置によって、特定条件下において、無人の車両の運転を行う技術の開発が進められている。遠隔型自動運転システムは、例えば車間距離制御システム(ACCS)や連続自動操舵システムを備える自動運行装置による車両の走行を、遠隔操作基地局において監視し、必要に応じて車両の操作を行うように構成されている。このような遠隔型自動運転システムにおいては、自動運行装置による車両の走行中、何らかの理由によって遠隔監視・遠隔操作による自動走行の継続が困難な状況となった場合には、車両に搭載された自動運行装置のリスク軽減機能(RMF:Risk Mitigation Function)によって対応する必要がある。
【0003】
例えば、特許文献1には、自動運転中の車両に異常が発生した場合に、退避場所を検索して退避場所までの誘導路を算出し、自動操舵により誘導路に沿って走行するように車両を制御することが開示されている。退避場所としては、例えば空き地や商業施設の駐車場など、車両が駐車可能なスペースが設定される。
【先行技術文献】
【特許文献】
【0004】
特開2019-152963号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、道路に設置された交差点の一種として、環状交差点(またはラウンドアバウト)が知られている。環状交差点は、複数の道路を円形のスペースを介して接続したものであり、円形スペースの中心にある中央島の周囲の環道を車両が一方向に周回するように構成されている。一般的に、環状交差点の環道には、一時停止位置や信号機は設置されない。このように、環状交差点は、通常の交差点とは形態が異なるため、環状交差点の近傍または環状交差点内でリスク軽減機能が作動した場合に、環状交差点内または環状交差点近傍において交通流の乱れや他の交通参加者との接触・衝突を招かないように、リスク軽減機能が作動した場合に退避場所まで安全に車両を誘導することが望まれる。
【0006】
本発明は、上記のような実状に鑑みてなされたものであり、その目的は、環状交差点近傍または環状交差点内でのリスク軽減機能の作動時に、交通流の乱れや他の交通参加者との接触・衝突のリスクを低減することにある。
【課題を解決するための手段】
【0007】
本発明の一態様によれば、遠隔監視・遠隔操作による自動走行を実行するための自動運行装置を備えた車両の走行制御装置であって、遠隔監視・遠隔操作による自動走行の継続が困難な状況になった場合に、前記車両を目標停止位置に停止させるリスク軽減制御を実行するリスク軽減機能(RMF)を有するものにおいて、前記自動運行装置は、前記自動走行中に、前記RMFの作動に備えて、前記車両の位置情報および地図情報に基づき、目標停止位置候補の探索を実行し、前記自動走行の目標経路とは異なる経路に位置する目標停止位置候補を含む複数の目標停止位置候補を設定し、前記目標経路上に環状交差点が存在する場合は前記環状交差点外に目標停止位置候補を設定し、環状交差点近傍または前記環状交差点内において前記RMFが作動する場合、前記複数の目標停止位置候補の中から目標停止位置を選択するように構成されている。
【発明の効果】
【0008】
本発明に係る車両の走行制御装置は、環状交差点近傍または環状交差点内におけるリスク軽減機能の作動時に、交通流の乱れや他の交通参加者との接触・衝突のリスクを低減することができる。
【図面の簡単な説明】
【0009】
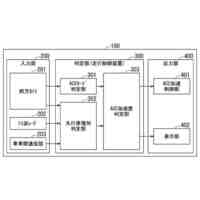
図1は、本発明の一実施の形態における車両の走行制御装置を示す概略図である。
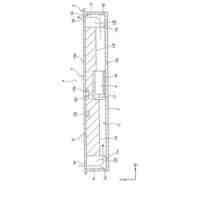
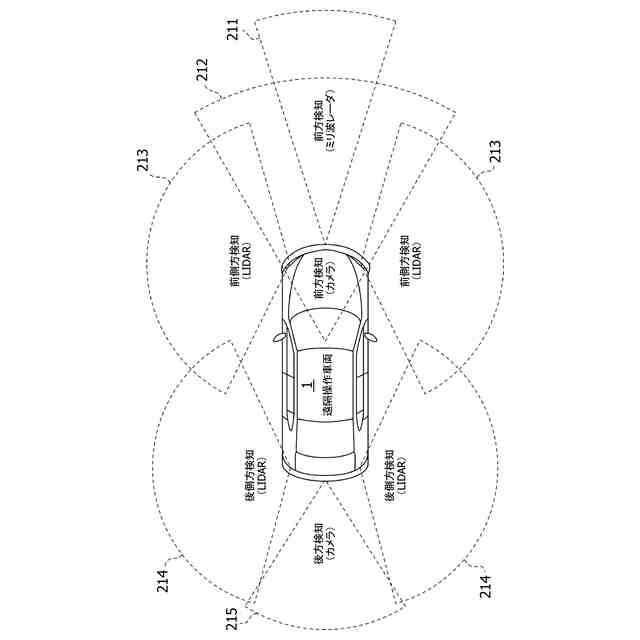
図2は、車両の外界センサ群を示す概略的な平面図である。
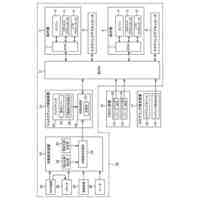
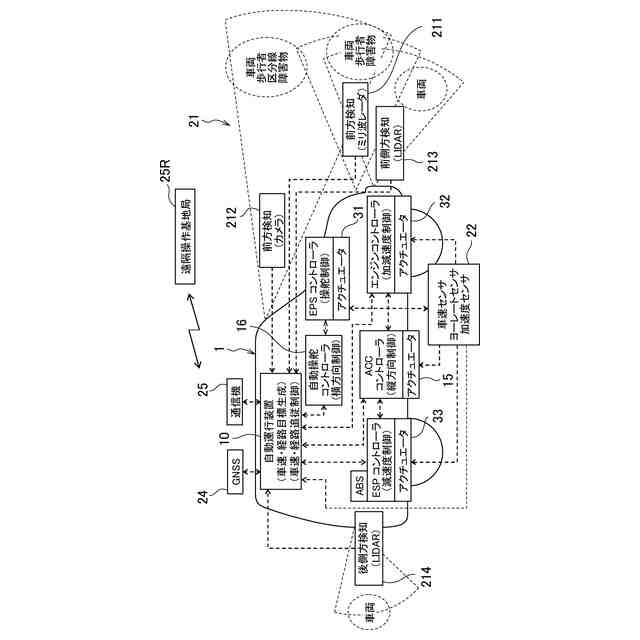
図3は、車両の走行制御装置を示すブロック図である。
図4は、環状交差点近傍または環状交差点内でRMFが作動する場合に備えて設定される複数の目標停止位置候補を示す図である。
図5は、複数の目標停止位置候補の優先順位の一例を示す表である。
図6は、RMF作動の流れを説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の一実施の形態について、図面を参照しながら詳細に説明する。本実施の形態による車両1の走行制御装置は、運行設計領域(ODD:Operational Design Domain)内において運転操作の全てを行う、SAE(Society of Automotive Engineers)レベル4相当の自動運転を実行可能に構成されている。また、車両1の走行制御装置は遠隔監視・遠隔操作による自動走行が可能な遠隔型の自動運転システムであり、車両1としては、無人自動運転移動サービスを提供するタクシーやレンタカー等のサービスカーが想定される。なお、本実施の形態は、無人で運行する自動走行車両だけでなく、有人で運行する自動走行車両にも適用可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
スズキ株式会社
内燃機関
22日前
スズキ株式会社
エアクリーナ
11日前
スズキ株式会社
移動システム
16日前
スズキ株式会社
車体下部構造
11日前
スズキ株式会社
車体下部構造
11日前
スズキ株式会社
車両前部構造
10日前
スズキ株式会社
運転支援装置
4日前
スズキ株式会社
車両用制御装置
8日前
スズキ株式会社
車両用制御装置
16日前
スズキ株式会社
車両用空調装置
1日前
スズキ株式会社
車両用制御装置
8日前
スズキ株式会社
車両用制御装置
2日前
スズキ株式会社
冷却水の排水構造
16日前
スズキ株式会社
燃料電池スタック
1日前
スズキ株式会社
吸気マニホールド
15日前
スズキ株式会社
車両用ペダル構造
15日前
スズキ株式会社
電装部品の冷却構造
9日前
スズキ株式会社
車両の走行制御装置
4日前
スズキ株式会社
車両の走行制御装置
4日前
スズキ株式会社
積層体のリサイクル方法
19日前
スズキ株式会社
車両用変速機の遮音構造
19日前
スズキ株式会社
エンジンの排気システム
3日前
スズキ株式会社
小型電動車両の制御装置
8日前
スズキ株式会社
車両用変速機の遮音構造
19日前
スズキ株式会社
リザーバタンクの設置構造
24日前
スズキ株式会社
車両用サスペンション構造
15日前
スズキ株式会社
エンジンの触媒暖機制御装置
16日前
スズキ株式会社
車両のバッテリ充電制御装置
9日前
スズキ株式会社
バスバー及び車両用電池パック
22日前
スズキ株式会社
触媒コンバータの異常診断装置
24日前
スズキ株式会社
自動着岸装置および自動着岸システム
18日前
スズキ株式会社
車両の走行制御装置及び走行制御方法
4日前
スズキ株式会社
車両用ドアおよび車両用ドアのシーリングカバー取付方法
2日前
スズキ株式会社
リサイクル成形品、その製造方法、及び車両用アンダーカバー
19日前
個人
カーテント
2か月前
個人
タイヤレバー
24日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ