TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122156
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2025087840,2023123111
出願日
2025-05-27,2023-07-28
発明の名称
経路設定装置
出願人
沖電気工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/644 20240101AFI20250813BHJP(制御;調整)
要約
【課題】多様な自律走行ロボットによる走行経路に沿った自律走行を実現する。
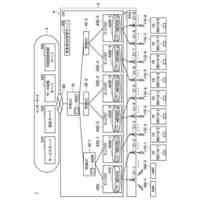
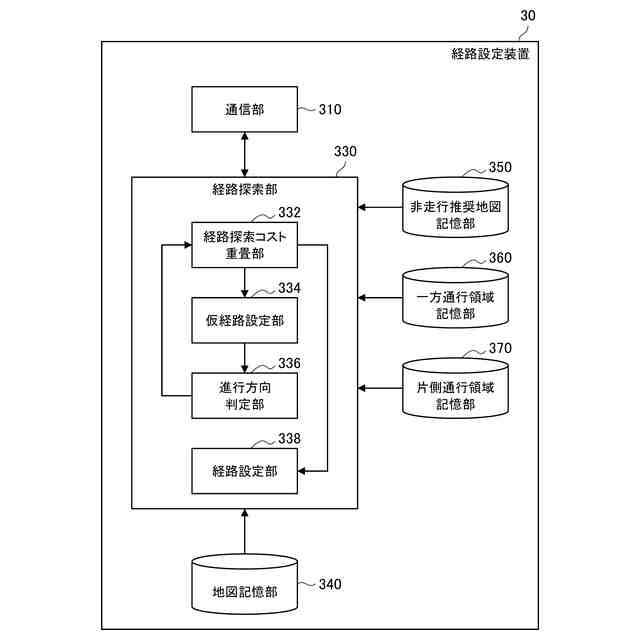
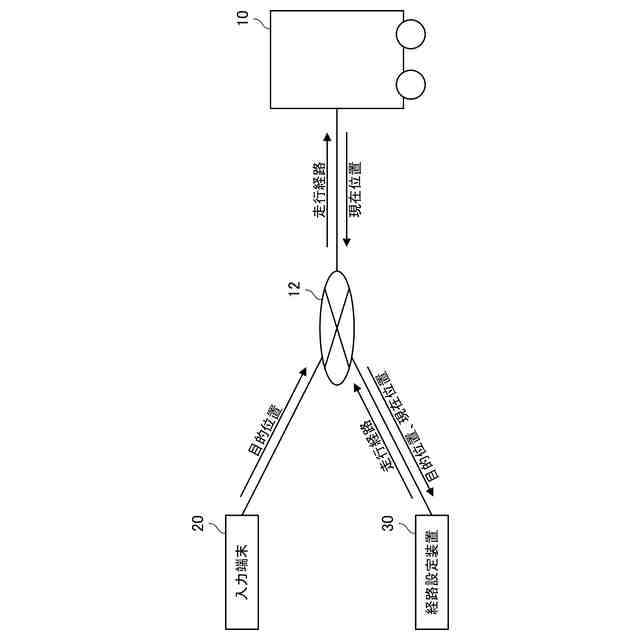
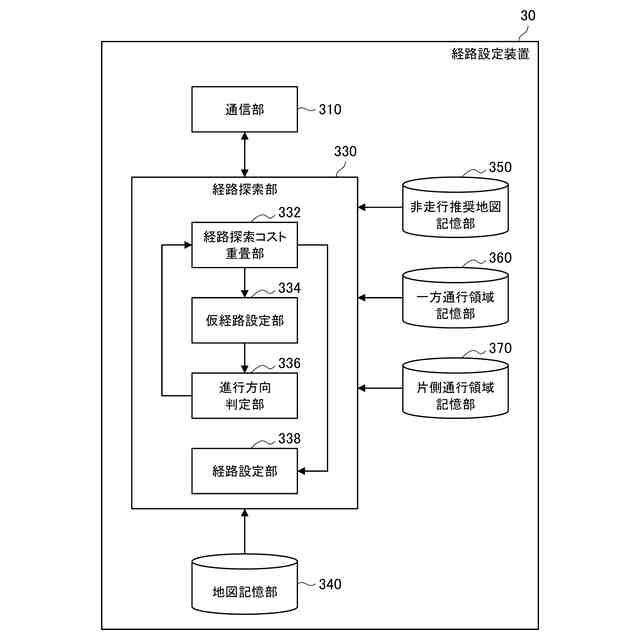
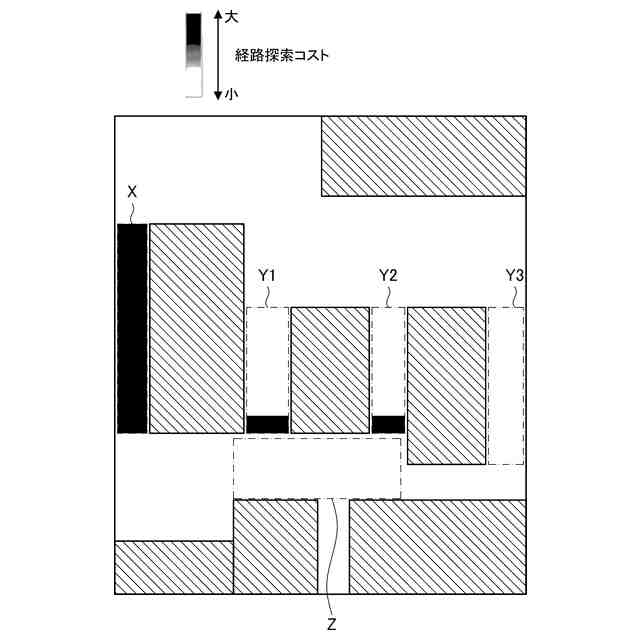
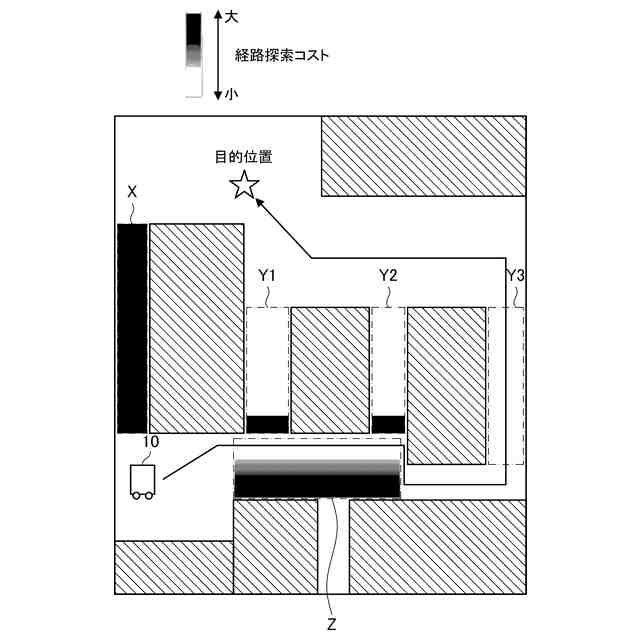
【解決手段】経路設定部と、経路設定部により設定された走行経路上の複数の経由位置を抽出する抽出部と、抽出部により抽出された複数の経由位置の各々を示す情報を自律走行ロボットに送信する通信部と、自律走行ロボットの走行環境を表現する地図情報に基づき、自律走行ロボットの現在位置から目的位置までの仮経路を設定する仮経路設定部と、仮経路に沿って自律走行ロボットが移動した場合の、進行方向の制約が設定されている制約領域における自律走行ロボットの進行方向を判定する進行方向判定部と、制約領域内に経路探索コストを設定する経路探索コスト設定部と、を備え、経路設定部は、制約領域内に設定された経路探索コストに基づいて、自律走行ロボットの現在位置から目的位置までの走行経路を設定する。
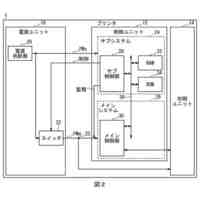
【選択図】図2
特許請求の範囲
【請求項1】
自律走行ロボットの現在位置から目的位置までの走行経路を設定する経路設定部と、
前記経路設定部により設定された前記走行経路上の複数の経由位置を抽出する抽出部と、
前記抽出部により抽出された前記複数の経由位置の各々を示す情報を前記自律走行ロボットに送信する通信部と、
前記自律走行ロボットの走行環境を表現する地図情報に基づき、前記自律走行ロボットの現在位置から目的位置までの仮経路を設定する仮経路設定部と、
前記仮経路に沿って前記自律走行ロボットが移動した場合の、進行方向の制約が設定されている制約領域における前記自律走行ロボットの進行方向を判定する進行方向判定部と、
前記進行方向判定部による判定の結果に基づいて前記制約領域内に経路探索コストを設定する経路探索コスト設定部と、
を備え、
前記経路設定部は、前記経路探索コスト設定部により前記制約領域内に設定された経路探索コストに基づいて、前記自律走行ロボットの現在位置から目的位置までの走行経路を設定する、経路設定装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制約領域は、進行方向が1方向に定められている一方通行領域を含み、
前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記経路探索コストの設定を、前記仮経路設定部により設定された前記仮経路が、前記1方向以外での前記一方通行領域の走行となる経路を含まなくなるまで繰り返す、請求項1に記載の経路設定装置。
【請求項3】
前記制約領域は、進行方向に向かって右側または左側を通ることが定められている片側通行領域を含み、
前記仮経路設定部により設定された前記仮経路が前記1方向以外での前記一方通行領域の走行となる経路を含まなくなるまで繰り返された後に、前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記片側通行領域における前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記片側通行領域への前記経路探索コストの設定を行う、請求項2に記載の経路設定装置。
【請求項4】
前記経路探索コスト設定部は、事前に記憶されている情報に基づいて前記地図情報内の位置に経路探索コストを設定し、
前記経路探索コスト設定部により前記情報に基づいて経路探索コストが設定された後に、前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記経路探索コストの設定を行う、請求項2に記載の経路設定装置。
【請求項5】
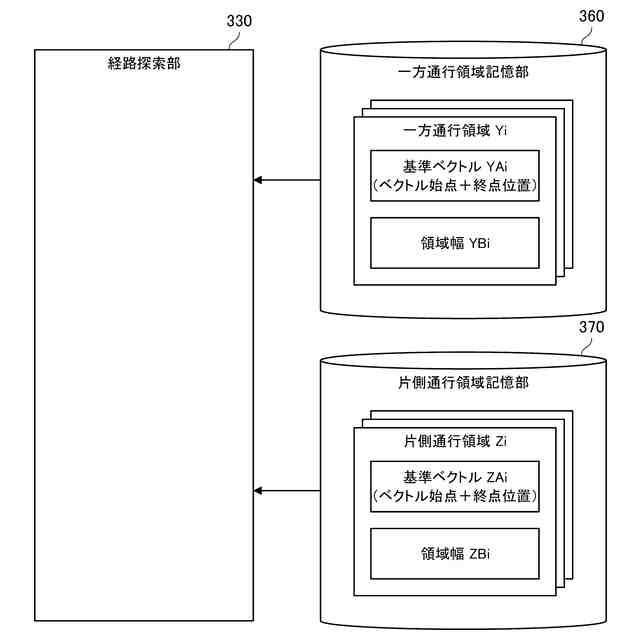
前記進行方向判定部は、前記制約領域を示す制約領域情報に基づき、前記仮経路内の前記制約領域を特定し、
前記制約領域情報は、前記地図情報における位置、姿勢および領域長さを示す基準ベクトルと、領域の幅を示す領域幅情報とを含む、請求項1に記載の経路設定装置。
【請求項6】
前記進行方向判定部は、前記仮経路のうちで、前記制約領域の境界に交差する複数の経路要素を結ぶ交点ベクトルを取得し、前記交点ベクトルと前記制約領域の前記基準ベクトルとの内積の結果に応じて前記制約領域における前記自律走行ロボットの進行方向を判定する、請求項5に記載の経路設定装置。
【請求項7】
前記制約領域情報は、期間または状況ごとに用意されており、
前記進行方向判定部は、前記制約領域情報のうちで、現在の日時または状況に合う情報に基づき、前記仮経路内の前記制約領域を特定する、請求項5または6に記載の経路設定装置。
【請求項8】
前記事前に記憶されている情報は、位置ごとの通信品質に応じた情報である、請求項4に記載の経路設定装置。
【請求項9】
前記事前に記憶されている情報は、過去に自律走行の失敗が発生した位置を示す情報である、請求項4に記載の経路設定装置。
【請求項10】
前記事前に記憶されている情報は、位置ごとの予想される歩行者の量に応じた情報である、請求項4に記載の経路設定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路設定装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、交通施設および商業施設などにおける警備業務または搬送業務の自動化に向けた自律走行ロボットの開発が進められている。自律走行とは、ロボットが現在位置から目的位置まで人の手を介さずに自律で走行する機能であり、自律走行ロボットは、自律走行の機能を持つロボットである。このような自律走行ロボットについては、例えば特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-191502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、商用化されている自律走行ロボットは、外部システムから設定された走行経路に沿って自律走行することが難しいという問題がある。一般的に商用化されている自律走行ロボットは、特定の業務の自動化に向けて開発されており、想定するユーザとしては、現在その業務を担当している非技術者であることが多い。そのため、自律走行ロボットの操作としても、基本的には自律走行の目的位置を指定するだけの単純な操作のみ可能となっている。
【0005】
また、経路計画は、各メーカーが保有する独自技術やノウハウによって調整される機能であり、特別な場合として走行経路が設定できたとしても、メーカーごとに構成が全く異なり、メーカーごとに異なる経路設定方法が必要となる可能性がある。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、走行経路に沿った自律走行を多様な自律走行ロボットで実現することが可能な技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、自律走行ロボットの現在位置から目的位置までの走行経路を設定する経路設定部と、前記経路設定部により設定された前記走行経路上の複数の経由位置を抽出する抽出部と、前記抽出部により抽出された前記複数の経由位置の各々を示す情報を前記自律走行ロボットに送信する通信部と、前記自律走行ロボットの走行環境を表現する地図情報に基づき、前記自律走行ロボットの現在位置から目的位置までの仮経路を設定する仮経路設定部と、前記仮経路に沿って前記自律走行ロボットが移動した場合の、進行方向の制約が設定されている制約領域における前記自律走行ロボットの進行方向を判定する進行方向判定部と、前記進行方向判定部による判定の結果に基づいて前記制約領域内に経路探索コストを設定する経路探索コスト設定部と、を備え、前記経路設定部は、前記経路探索コスト設定部により前記制約領域内に設定された経路探索コストに基づいて、前記自律走行ロボットの現在位置から目的位置までの走行経路を設定する経路設定装置が提供される。
【0008】
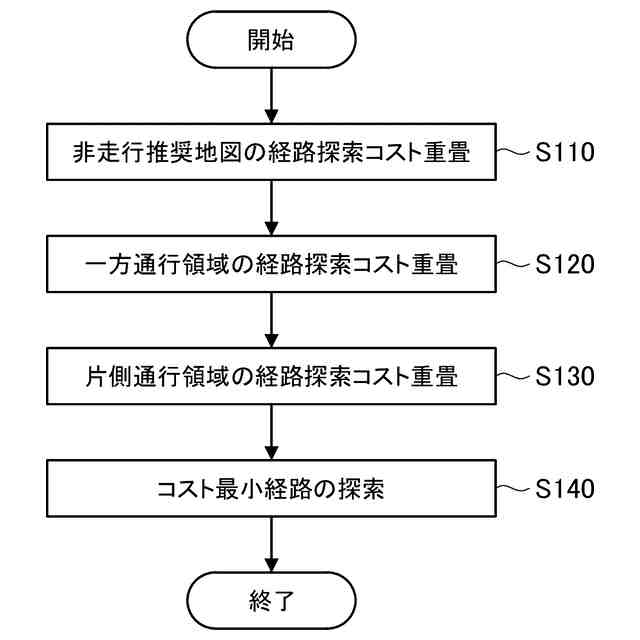
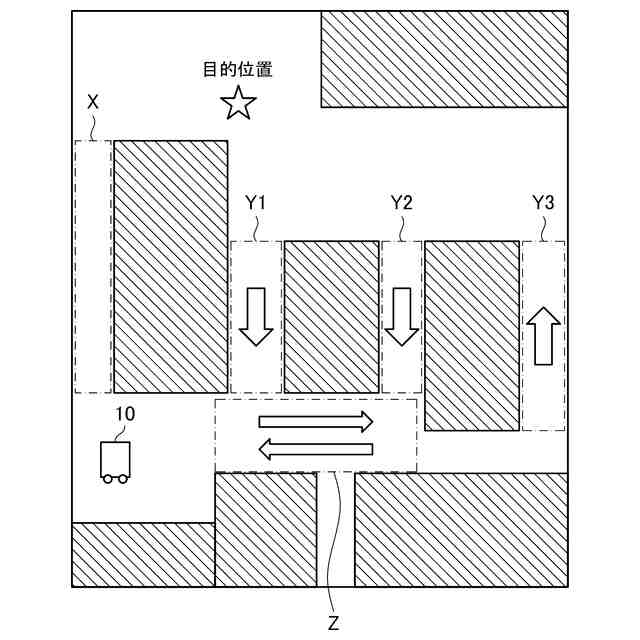
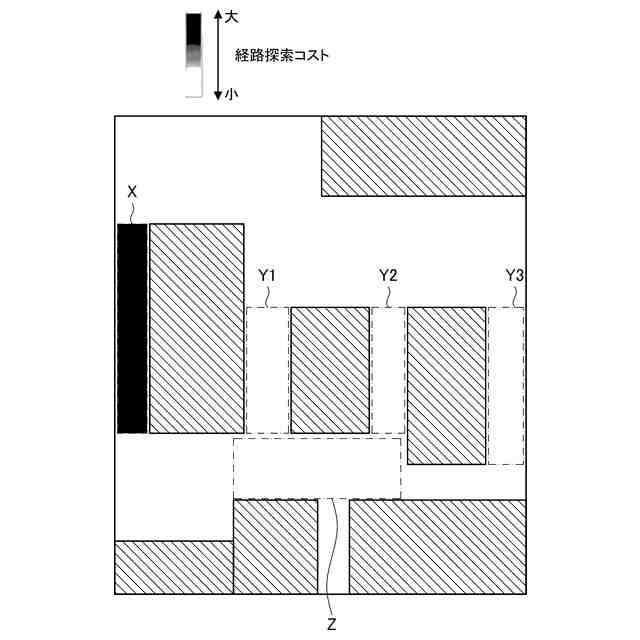
前記制約領域は、進行方向が1方向に定められている一方通行領域を含み、前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記経路探索コストの設定を、前記仮経路設定部により設定された前記仮経路が、前記1方向以外での前記一方通行領域の走行となる経路を含まなくなるまで繰り返してもよい。
【0009】
前記制約領域は、進行方向に向かって右側または左側を通ることが定められている片側通行領域を含み、前記仮経路設定部により設定された前記仮経路が前記1方向以外での前記一方通行領域の走行となる経路を含まなくなるまで繰り返された後に、前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記片側通行領域における前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記片側通行領域への前記経路探索コストの設定を行ってもよい。
【0010】
前記経路探索コスト設定部は、事前に記憶されている情報に基づいて前記地図情報内の位置に経路探索コストを設定し、前記経路探索コスト設定部により前記情報に基づいて経路探索コストが設定された後に、前記仮経路設定部による前記仮経路の設定、前記進行方向判定部による前記自律走行ロボットの進行方向の判定、および前記経路探索コスト設定部による前記経路探索コストの設定を行ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
沖電気工業株式会社
電気機器
11日前
沖電気工業株式会社
アンテナ
2日前
沖電気工業株式会社
紙幣処理装置
2日前
沖電気工業株式会社
電子機器筐体
18日前
沖電気工業株式会社
媒体処理装置
18日前
沖電気工業株式会社
現金処理装置
11日前
沖電気工業株式会社
棒金収納装置
11日前
沖電気工業株式会社
画像形成装置
6日前
沖電気工業株式会社
画像形成装置
5日前
沖電気工業株式会社
貨幣取扱装置
4日前
沖電気工業株式会社
画像形成装置
2か月前
沖電気工業株式会社
媒体処理装置
3日前
沖電気工業株式会社
媒体処理装置
2か月前
沖電気工業株式会社
画像形成装置
1か月前
沖電気工業株式会社
画像撮影システム
4日前
沖電気工業株式会社
携帯通信端末システム
18日前
沖電気工業株式会社
定着装置及び画像形成装置
23日前
沖電気工業株式会社
給紙装置及び画像形成装置
25日前
沖電気工業株式会社
定着装置及び画像形成装置
6日前
沖電気工業株式会社
情報処理方法及びプログラム
25日前
沖電気工業株式会社
硬貨処理装置及び貨幣取扱装置
18日前
沖電気工業株式会社
画像形成装置及び画像形成方法
1か月前
沖電気工業株式会社
プログラム、方法及びシステム
1か月前
沖電気工業株式会社
情報処理装置及び情報処理方法
1か月前
沖電気工業株式会社
ドラムユニット及び画像形成装置
26日前
沖電気工業株式会社
通信装置、通信システム及び通信方法
6日前
沖電気工業株式会社
通信装置、通信方法およびプログラム
4日前
沖電気工業株式会社
光学装置、画像形成装置及び読取装置
25日前
沖電気工業株式会社
部品管理装置、方法およびプログラム
1か月前
沖電気工業株式会社
情報処理装置、方法およびプログラム
12日前
沖電気工業株式会社
転写ベルトユニット及び画像形成装置
2日前
沖電気工業株式会社
パネルユニット取付け構造および装置
1か月前
沖電気工業株式会社
監視装置、監視プログラム及び監視方法
1か月前
沖電気工業株式会社
処理装置、プログラム、および処理方法
1か月前
沖電気工業株式会社
データ処理装置、方法およびプログラム
2か月前
沖電気工業株式会社
収音装置、収音プログラム及び収音方法
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ