TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122767
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018397
出願日
2024-02-09
発明の名称
センサーモジュール、電子機器、移動体測位装置、および移動体
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
19/5649 20120101AFI20250815BHJP(測定;試験)
要約
【課題】異なる種類の慣性センサー素子を組み合わせることの影響を抑制できる慣性計測装置を提供すること。
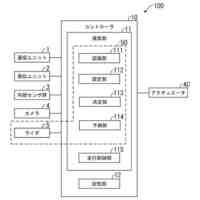
【解決手段】本実施形態の慣性計測装置100は、Z軸回りの角速度を検出するZ軸角速度センサー素子Gz1と、Z軸回りの角速度を検出し、Z軸角速度センサー素子Gz1とは種類の異なるZ軸角速度センサー素子Gz2と、を含み、それぞれがZ軸回りの角速度を検出する複数の慣性センサー素子と、複数の重み係数A
1
,A
2
を用いて、複数の慣性センサー素子の角速度ω
z1
,ω
z2
を加重平均する演算回路30と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1の物理量を検出する第1慣性センサー素子と、前記第1の物理量を検出し、前記第1慣性センサー素子とは種類の異なる第2慣性センサー素子と、を含み、それぞれが前記第1の物理量を検出する複数の慣性センサー素子と、
複数の重み係数を用いて、前記複数の慣性センサー素子の検出信号を加重平均する演算部と、を備える、
センサーモジュール。
続きを表示(約 760 文字)
【請求項2】
前記複数の重み係数は、前記第1慣性センサー素子に用いる第1重み係数と、前記第2慣性センサー素子に用いる第2重み係数とを有し、
前記第1重み係数と前記第2重み係数とは、異なる、
請求項1に記載のセンサーモジュール。
【請求項3】
前記複数の重み係数は、前記第1慣性センサー素子の誤差情報に基づく第1重み係数と、前記第2慣性センサー素子の誤差情報に基づく第2重み係数とを含む、
請求項1に記載のセンサーモジュール。
【請求項4】
前記複数の慣性センサー素子のうちの故障した慣性センサー素子を検知する検知部を備え、
前記演算部は、前記検知部によって、故障と検知された慣性センサー素子に用いる重み係数をゼロにする、
請求項1に記載のセンサーモジュール。
【請求項5】
請求項1ないし請求項4に記載のセンサーモジュールを備える電子機器。
【請求項6】
第1の物理量を検出する第1慣性センサー素子と、前記第1の物理量を検出し、前記第1慣性センサー素子とは種類の異なる第2慣性センサー素子と、を含み、それぞれが前記第1の物理量を検出する複数の慣性センサー素子と、
複数の重み係数を用いて、前記複数の慣性センサー素子の検出信号を加重平均する演算部と、
測位用衛星から位置情報が重畳された衛星信号を受信する受信部と、
前記衛星信号に基づいて、前記位置情報を取得する取得部と、
前記位置情報と前記演算部からの加重平均後の検出信号とに基づいて、移動体の位置を算出する算出部と、を備える、
移動体測位装置。
【請求項7】
請求項6に記載の移動体測位装置を備える移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサーモジュール、電子機器、移動体測位装置、および移動体に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
複数の角速度センサーデバイスを備え、これら複数の角速度センサーデバイスからのZ軸角速度データの平均値を、マイクロコントローラーが演算することで、Z軸角速度データの高精度化ができることが、特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-163955号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
高精度化のために複数の角速度センサーデバイスを用いる方法として、異なる種類のセンサーデバイスを組み合わせて用いることが検討されている。この場合、異なる種類のセンサーデバイスを組み合わせることの影響を考慮する必要がある。
【課題を解決するための手段】
【0005】
本願の一態様に係るセンサーモジュールは、第1の物理量を検出する第1慣性センサー素子と、前記第1の物理量を検出し、前記第1慣性センサー素子とは種類の異なる第2慣性センサー素子と、を含み、それぞれが前記第1の物理量を検出する複数の慣性センサー素子と、複数の重み係数を用いて、前記複数の慣性センサー素子の検出信号を加重平均する演算部と、を備える。
【0006】
本願の一態様に係る電子機器は、上記に記載のセンサーモジュールを備える。
【0007】
本願の一態様に係る移動体測位装置は、第1の物理量を検出する第1慣性センサー素子と、前記第1の物理量を検出し、前記第1慣性センサー素子とは種類の異なる第2慣性センサー素子と、を含み、それぞれが前記第1の物理量を検出する複数の慣性センサー素子と、複数の重み係数を用いて、前記複数の慣性センサー素子の検出信号を加重平均する演算部と、測位用衛星から位置情報が重畳された衛星信号を受信する受信部と、前記衛星信号に基づいて、前記位置情報を取得する取得部と、前記位置情報と前記演算部からの加重平均後の検出信号とに基づいて、移動体の位置を算出する算出部と、を備える。
【0008】
本願の一態様に係る移動体は、上記に記載の移動体測位装置を備える。
【図面の簡単な説明】
【0009】
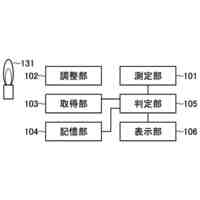
実施形態1に係るセンサーモジュールのブロック図。
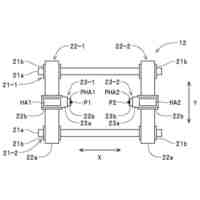
センサー座標系の説明図。
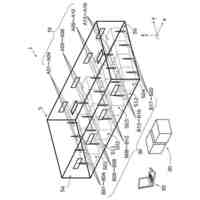
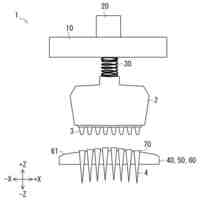
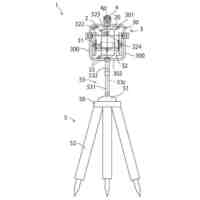
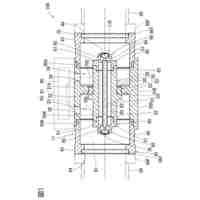
センサーモジュールの外観を示す斜視図。
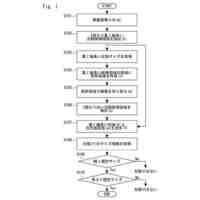
補正回路のブロック図。
実施形態2に係るセンサーモジュールのブロック図。
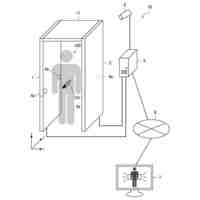
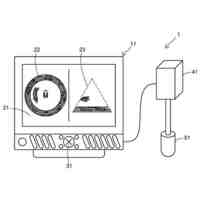
実施形態3に係る電子機器の一例を示す斜視図。
実施形態3に係る電子機器の他の一例を示す斜視図。
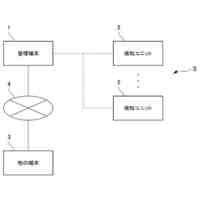
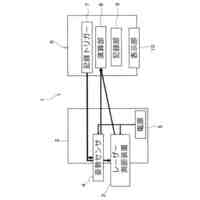
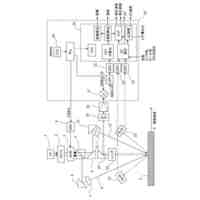
実施形態4に係る移動体測位装置のブロック図。
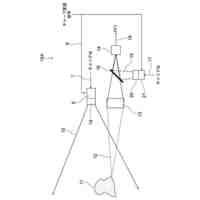
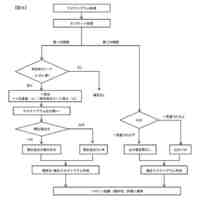
移動体測位装置の作用を示す図。
【発明を実施するための形態】
【0010】
各図面は、各構成要素を見やすくするため、構成要素によって寸法の縮尺を異ならせて示されることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
力変換器
14日前
横浜ゴム株式会社
音響窓
16日前
株式会社豊田自動織機
産業車両
21日前
三菱電機株式会社
計測器
8日前
株式会社辰巳菱機
システム
2日前
個人
センサーを備えた装置
18日前
日置電機株式会社
測定装置
15日前
IPU株式会社
距離検出装置
14日前
日本精機株式会社
施工管理システム
18日前
株式会社FRPカジ
FRP装置
4日前
株式会社東芝
センサ
17日前
学校法人立命館
液面レベルセンサ
1日前
大和製衡株式会社
組合せ計量装置
4日前
富士レビオ株式会社
嵌合システム
7日前
日本精工株式会社
分注装置
今日
株式会社CAST
センサ固定治具
21日前
株式会社田中設備
報知装置
22日前
富士電機株式会社
半導体パッケージ
10日前
アズビル株式会社
火炎状態判定装置
15日前
株式会社熊平製作所
刃物類判別装置
21日前
三菱マテリアル株式会社
温度センサ
今日
本多電子株式会社
超音波ソナー装置
9日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
25日前
戸田建設株式会社
測量機
今日
三和テッキ株式会社
架線の高さ、偏位測定装置
2日前
トヨタ自動車株式会社
表面傷の検査方法
16日前
已久工業股ふん有限公司
空気圧縮機構造
17日前
トヨタ自動車株式会社
データの補正方法
9日前
東ソー株式会社
クロマトグラムの形状判定方法
10日前
本田技研工業株式会社
外界認識装置
4日前
アクト電子株式会社
レーザドップラ速度計
4日前
大豊建設株式会社
鉛直精度測定装置
4日前
大豊建設株式会社
直線精度測定装置
4日前
株式会社 ミックウェア
端末装置及びプログラム
23日前
愛知時計電機株式会社
超音波流量計
14日前
ミネベアミツミ株式会社
角度センサ
25日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ