TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124080
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2025021568
出願日
2025-02-13
発明の名称
仮想マネキンの位置合わせ
出願人
ダッソー システムズ
,
DASSAULT SYSTEMES
代理人
弁理士法人谷・阿部特許事務所
主分類
G06T
13/40 20110101AFI20250818BHJP(計算;計数)
要約
【課題】本開示は、特に、第1の仮想マネキンを第2の仮想マネキンと位置合わせするためのコンピュータ実施方法に関する。
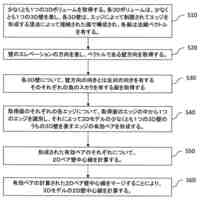
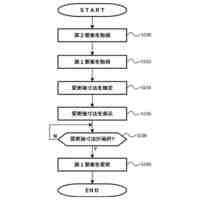
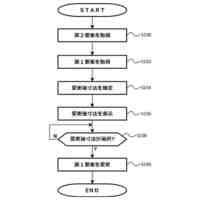
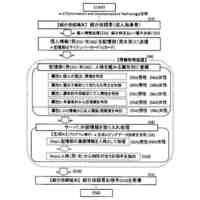
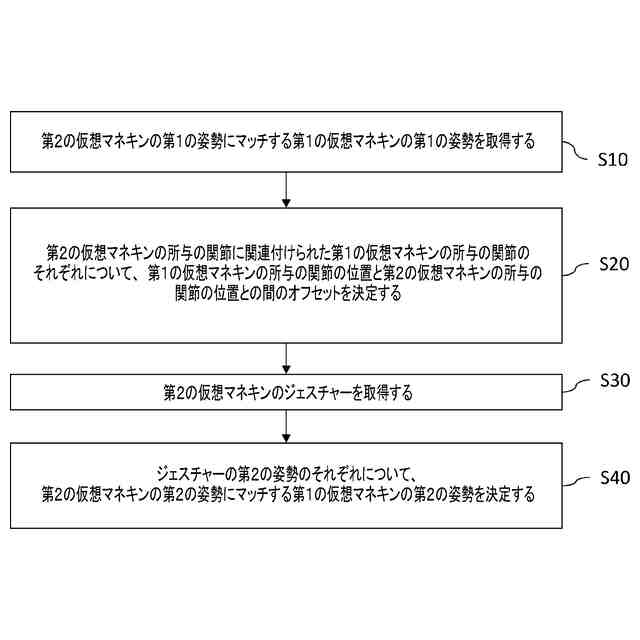
【解決手段】方法は、第2の仮想マネキンの第1の姿勢にマッチする第1の仮想マネキンの第1の姿勢を取得すること(S10)を含む。方法は、第2の仮想マネキンの関節に関連付けられた第1の仮想マネキンの関節の位置の間のオフセットを決定すること(S20)を含む。方法は、第2の仮想マネキンのジェスチャーを取得すること(S30)を含む。方法は、ジェスチャーの各第2の姿勢について、第2の仮想マネキンの第2の姿勢にマッチする第1の仮想マネキンの第2の姿勢を決定すること(S40)を含む。関連付けられた関節間の決定されたオフセットは、決定された各第2の姿勢に維持される。このような方法は、第1の仮想マネキンを第2の仮想マネキンと位置合わせするための改善された解決策を形成する。
【選択図】図1
特許請求の範囲
【請求項1】
第1の仮想マネキンを第2の仮想マネキンと位置合わせするためのコンピュータ実施方法であって、
前記第2の仮想マネキンの第1の姿勢にマッチする前記第1の仮想マネキンの第1の姿勢を取得することであって(S10)、各仮想マネキンは、それぞれが各接合部を表す関節と、それぞれが各関節のペアを接続するセグメントとを含み、前記第1の仮想マネキンの前記関節の少なくとも一部のそれぞれの関節は、前記第2の仮想マネキンのそれぞれの関節に関連付けられ、前記第1の仮想マネキンの各関節及び一緒に関連付けられた前記第2の仮想マネキンの関節は、同じそれぞれの接合部を表す、ことと、
前記第2の仮想マネキンの所与の関節に関連付けられた前記第1の仮想マネキンの所与の関節ごとに、前記第1の仮想マネキンの前記所与の関節の位置と前記第2の仮想マネキンの前記所与の関節の位置との間のオフセットを決定することであって(S20)、前記オフセットは、関節の少なくとも1つの関連付けに対して非ゼロであると決定される、ことと、
前記第2の仮想マネキンのジェスチャーを取得することであって(S30)、前記ジェスチャーは、前記第2の仮想マネキンの1つ以上の第2の姿勢を含む、ことと、
前記ジェスチャーの各第2の姿勢について、前記第2の仮想マネキンの前記第2の姿勢にマッチする前記第1の仮想マネキンの第2の姿勢を決定することであって(S40)、前記関連付けられた関節間の前記決定されたオフセットは、各決定された第2の姿勢に維持される、ことと
を含む方法。
続きを表示(約 1,700 文字)
【請求項2】
前記第1の仮想マネキンは、単一のセグメントによって接続された関連付けられた関節の少なくとも1つの第1のペアを含み、前記第2の仮想マネキンは、各第1のペアについて、前記第1のペアのそれらに関連付けられた前記関節間の2つ以上のセグメントを含み、前記第1の姿勢で各第1のペアを接続する前記単一のセグメントの長さは、少なくとも1つの第2の姿勢でのそれとは異なる、請求項1に記載の方法。
【請求項3】
各仮想マネキンの前記関節は、少なくとも4つの遠位関節を含み、前記セグメントは、各仮想マネキンについて、前記関節のペアを前記遠位関節まで連続的に接続し、前記第1の仮想マネキンの各遠位関節は、前記第2の仮想マネキンのそれぞれの遠位関節に関連付けられ、前記遠位関節の各関連付けについて決定されたオフセットはゼロである、請求項1または2に記載の方法。
【請求項4】
各遠位関節は、向きを有し、前記関連付けられた遠位関節間の向きは、決定された各第2の姿勢で等しい、請求項3に記載の方法。
【請求項5】
前記第2の仮想マネキンの前記第1の姿勢にマッチする前記第1の仮想マネキンの前記第1の姿勢を取得すること(S10)は、前記関節の関連付け間の累積距離の最小化を実行することを含む、請求項1から4のいずれか1項に記載の方法。
【請求項6】
前記第1の仮想マネキンは、2つの関連付けられた関節に接続された少なくとも1つの関節を含み、前記第1の仮想マネキンの前記第2の姿勢を決定すること(S40)は、前記少なくとも1つの関節を前記2つの関連付けられた関節と位置合わせすることを含む、請求項1から5のいずれか1項に記載の方法。
【請求項7】
各仮想マネキンは、それぞれの皮膚形状を表し、前記第1の仮想マネキンは、前記第1の仮想マネキンによって表される前記皮膚形状上に配置された頂点を有するメッシュを含み、前記第2の仮想マネキンは、前記第2の仮想マネキンによって表される前記皮膚形状上に配置された表面目印を含み、前記方法は、前記第2の仮想マネキンの前記第2の姿勢とマッチする前記第1の仮想マネキンの前記第2の姿勢を決定すること(S40)の後に、前記第2の仮想マネキンの前記表面目印とマッチするように前記第1の仮想マネキンの前記メッシュを変形することをさらに含む、請求項1から6のいずれか1項に記載の方法。
【請求項8】
前記メッシュを変形することは、前記第1の仮想マネキンの各セグメントについて、
前記第1の仮想マネキンの前記セグメントに属する前記メッシュの前記頂点を決定することと、
前記結果として生じるメッシュが前記表面目印を含むように、前記決定された頂点の前記位置を修正することとを含む請求項7に記載の方法。
【請求項9】
前記メッシュを変形することは、前記位置を修正することの前に、前記セグメントに沿った第1の軸と、互いにおよび前記第1の軸に垂直な2つの第2の軸とを含むローカル座標系を決定することをさらに含み、前記決定された頂点は、前記決定されたローカル座標系内の座標を有し、前記位置を修正することは、各決定された頂点について、前記2つの第2の軸に沿った前記頂点の前記座標を修正することを含む、請求項8に記載の方法。
【請求項10】
前記メッシュを変形することは、前記第1の軸に沿った連続する表面目印の各ペアについて、
前記ペアの前記連続する表面目印間の形状関数を決定することと、
前記決定された形状関数及び補間関数に基づいて、前記ペアの前記表面目印間の前記メッシュに適用される変形係数を推定することとをさらに含み、
前記2つの第2の軸に沿った前記頂点の前記座標を修正することは、前記2つの第2の軸に沿った前記頂点の前記座標に、前記推定された変形係数を乗算することを含む請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、コンピュータプログラム及びシステムの分野に関し、より具体的には、第1の仮想マネキンを第2の仮想マネキンと位置合わせする方法、システム及びプログラムに関する。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
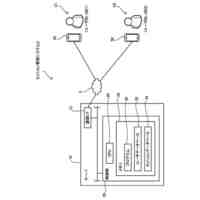
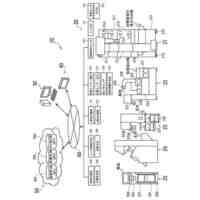
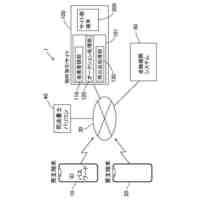
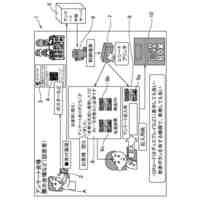
オブジェクトの設計、エンジニアリング、製造のために、多くのシステムとプログラムが市場で提供されている。CADは、コンピュータ支援設計の頭字語であり、たとえば、オブジェクトを設計するためのソフトウェアソリューションに関連する。CAEは、コンピュータ支援エンジニアリングの頭字語であり、たとえば、将来の製品の物理的動作をシミュレートするためのソフトウェアソリューションに関連する。CAMは、コンピュータ支援製造の頭字語であり、たとえば、製造プロセスと操作を定義するためのソフトウェアソリューションに関連する。このようなコンピュータ支援設計システムでは、グラフィカルユーザインターフェースが技術の効率に関して重要な役割を果たす。これらの技術は、製品ライフサイクル管理(PLM)システム内に組み込まれ得る。PLMは、企業が製品データを共有し、共通のプロセスを適用し、企業の知識を活用して、拡張エンタープライズの概念にわたって、構想からそれらの寿命の終わりまでの製品の開発を支援するビジネス戦略を指す。ダッソーシステムズによって(CATIA、ENOVIA、DELMIAの商標の下で)提供されるPLMソリューションは、製品エンジニアリングの知識を整理するエンジニアリングハブ、製造エンジニアリングの知識を管理する製造ハブ、およびエンタープライズ統合とエンジニアリングおよび製造ハブの両方への接続とを可能にするエンタープライズハブを提供する。このシステムは全体として、製品、プロセス、リソースをリンクさせるオープンオブジェクトモデルを提供して、ダイナミックな知識ベースの製品製作および最適化された製品定義、製造準備、生産、およびサービスを推進する意思決定支援を可能にする。
【0003】
これらのCADソリューションでは、仮想マネキンを使用して仮想環境で人間をエミュレートし、設計の初期段階で、現実世界での実際のプロトタイプのかなり前に、オブジェクトの適合性を設計し、評価し、査定することができる。例えば、これらの仮想マネキンを使用して、オブジェクトの設計がさまざまな形状およびサイズの人間に適合していることをチェックしたり、人間を配置した状態でオブジェクトをリアルに見たりすることができる。特に、既存のデジタルヒューマンモデリング(DHM)ソリューションは、幅広い形状及び寸法を有する姿勢モデリングの観点から、人間を正確にエミュレートすることができる。
【0004】
仮想マネキンの使用における主な制限は、その配置にある。実際、仮想マネキンの配置は、最的な骨格構成を決定すること、および骨格に従って(骨格を包む)皮膚を形作って、その結果得られる姿勢がタスクシナリオに適合して自然かつリアルに見えるようにすることを含む。この点において、従来の方法から人工知能(AI)に基づく予測技術に至るまで、著しい進歩があった。幾何学的モデリングに関する文献は、骨格の姿勢の変化に応じて異なる形状の仮想マネキンを作成するための多種多様な技術を提供する。しかしながら、仮想マネキンの配置は依然として複雑で時間がかかり、それを自動的に行うための効率的な方法は存在しない。
【0005】
特に、適切な標準化の欠如とアプリケーション固有のモデリングの結果、単純なものから複雑なものまで、さまざまな精度で人間の動作を模倣する仮想マネキンが生まれた。いくつかのDHMアプリは、多様な機能を備えて市販されており、いくつかの仮想マネキンは、人体計測とリンケージ構造の精度を重視しているが、他の仮想マネキンは、姿勢/動きモデリングと生体力学が得意であり、その他の仮想マネキンは、動作と認知の側面を重視している。このばらつきのため、CADシステム全体に存在する相互運用性の問題が、仮想マネキンにも継承される。同じ組織内または共同組織内で複数のデジタルヒューマンアプリの使用が増えるにつれて、データ交換の観点からこれらのアプリ間の通信の必要性が高まっている。
【0006】
したがって、同じ製品の設計に、異なる仮想マネキンが一般的に関与する。例えば、ある仮想マネキンは、人間工学計算に使用することができ、別の仮想マネキンは、仮想レンダリングに使用することができる。しかしながら、これらの異なる仮想マネキンの姿勢を互いに関連して再現するための効果的な方法は、特にそれらが同じ関節を有さないために存在しない。したがって、使用される仮想マネキンのそれぞれは、それらが同じジェスチャーを実行している場合でも、手動で再配置されなければならない。第1の仮想マネキンのジェスチャーが決定されると、同じジェスチャーに従って他方の仮想マネキンを自動的に配置することができることは有用であろうが、それを自動的かつ正確に行うための効率的な方法は存在しない。
【0007】
この文脈では、第1の仮想マネキンを第2の仮想マネキンと位置合わせするための改善された解決策が依然として必要とされている。
【発明の概要】
【0008】
したがって、第1の仮想マネキンを第2の仮想マネキンと位置合わせするためのコンピュータ実施方法が提供される。方法は、第2の仮想マネキンの第1の姿勢にマッチする第1の仮想マネキンの第1の姿勢を取得することを含む。各仮想マネキンは、それぞれが各接合部を表す関節と、それぞれが各関節のペアを接続するセグメントとを備える。第1の仮想マネキンの関節の少なくとも一部の各関節は、第2の仮想マネキンの各関節に関連付けられる。第1の仮想マネキンの関節及び一緒に関連付けられた第2の仮想マネキンの関節のそれぞれは、両方とも同じそれぞれの接合部を表す。方法は、第2の仮想マネキンの所与の関節に関連付けられた第1の仮想マネキンの所与の関節ごとに、第1の仮想マネキンの所与の関節の位置と第2の仮想マネキンの所与の関節の位置との間のオフセットを決定することを含む。関節の少なくとも1つの関連付けについて決定されたオフセットは、非ゼロである。方法は、第2の仮想マネキンのジェスチャーを取得することを含む。ジェスチャーは、第2の仮想マネキンの1つまたは複数の第2の姿勢を含む。方法は、ジェスチャーの各第2の姿勢について、第2の仮想マネキンの第2の姿勢にマッチする第1の仮想マネキンの第2の姿勢を決定することを含む。関連付けられた関節間の決定されたオフセットは、決定された各第2の姿勢に維持される。
【0009】
方法は、以下のうちの1つまたは複数を含み得る。
【0010】
第1の仮想マネキンは、単一のセグメントによって接続された関連付けられた関節の少なくとも1つの第1のペアを備える。第2の仮想マネキンは、各第1のペアについて、第1のペアのそれらに関連付けられた関節間の2つ以上のセグメントを備える。第1の姿勢において各第1のペアを接続する単一のセグメントの長さは、少なくとも1つの第2の姿勢のそれとは異なり、
各仮想マネキンの関節は、少なくとも4つの遠位関節を含む。セグメントは、各仮想マネキンについて、関節のペアを遠位関節まで連続的に接続する。第1の仮想マネキンの各遠位関節は、第2の仮想マネキンのそれぞれの遠位関節に関連付けられる。遠位関節の各関連付けについて決定されたオフセットはゼロであり、
各遠位関節には向きがある。関連付けられた遠位関節間の向きは、決定された各第2の姿勢で等しく、
第2の仮想マネキンの第1の姿勢にマッチする第1の仮想マネキンの第1の姿勢の取得は、関節の関連付けの間の累積距離の最小化を実行することを含み、
第1の仮想マネキンは、2つの関連付けられた関節に接続された少なくとも1つの関節を備える。第1の仮想マネキンの第2の姿勢の決定は、少なくとも1つの関節を2つの関連付けられた関節と位置合わせすることを含み、
各仮想マネキンは、それぞれの皮膚形状を表す。第1の仮想マネキンは、第1の仮想マネキンによって表される皮膚形状上に配置された頂点を有するメッシュを備える。第2の仮想マネキンは、第2の仮想マネキンによって表される皮膚形状上に配置された表面目印を備える。方法は、第2の仮想マネキンの第2の姿勢とマッチする第1の仮想マネキンの第2の姿勢の決定後に、第1の仮想マネキンのメッシュを第2の仮想マネキンの表面目印とマッチするように変形させることをさらに含み、
メッシュの変形は、第1の仮想マネキンの各セグメントについて、
第1の仮想マネキンのセグメントに属するメッシュの頂点を決定することと、
結果として生じるメッシュが表面目印を含むように、決定された頂点の位置を修正することとを含み、
メッシュの変形は、位置の修正の前に、セグメントに沿った第1の軸と、互いにおよび第1の軸に垂直な2つの第2の軸とを含むローカル座標系を決定することをさらに含む。決定された頂点は、決定されたローカル座標系内の座標を有する。位置の修正は、決定された頂点ごとに、2つの第2の軸に沿った頂点の座標を修正することを含み、
メッシュの変形は、第1の軸に沿った連続する表面目印の各ペアについて、
ペアの連続する表面目印間の形状関数を決定することと、
決定された形状関数及び補間関数に基づいて、ペアの表面目印間のメッシュに適用される変形係数を推定することとをさらに含み、
2つの第2の軸に沿った頂点の座標の修正は、2つの第2の軸に沿った頂点の座標に推定される変形係数を乗算することを含み、
第1の仮想マネキンの関節の数は、第2の仮想マネキンの関節の数よりも少なく、および/または、
第1の仮想マネキンは、人間工学的に正確な骨格であり、および/または第2の仮想マネキンは、生体力学的に正確な骨格である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ダッソー システムズ
仮想マネキンの位置合わせ
4日前
ダッソー システムズ
3D壁からの2D壁中心線の復元
16日前
ダッソー システムズ ソリッドワークス コーポレイション
スケッチ寸法を使用したモデルベース定義寸法の自動生成
3日前
ダッソー システムズ ソリッドワークス コーポレイション
コンピュータ支援設計三次元モデルのトリミングされた表現の生成
3日前
個人
裁判のAI化
1か月前
個人
情報処理システム
1か月前
個人
フラワーコートA
22日前
個人
工程設計支援装置
14日前
個人
記入設定プラグイン
2か月前
個人
情報処理装置
2か月前
個人
検査システム
1か月前
個人
介護情報提供システム
29日前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
個人
携帯情報端末装置
15日前
株式会社サタケ
籾摺・調製設備
1か月前
キヤノン電子株式会社
携帯装置
1か月前
個人
不動産売買システム
1か月前
個人
結婚相手紹介支援システム
11日前
株式会社カクシン
支援装置
1か月前
個人
アンケート支援システム
24日前
個人
パスポートレス入出国システム
今日
株式会社アジラ
進入判定装置
今日
個人
備蓄品の管理方法
1か月前
キヤノン株式会社
情報処理装置
1か月前
個人
ジェスチャーパッドのガイド部材
28日前
キヤノン株式会社
情報処理装置
1か月前
サクサ株式会社
中継装置
25日前
個人
食事受注会計処理システム
1日前
サクサ株式会社
中継装置
1か月前
株式会社BONNOU
管理装置
2か月前
大阪瓦斯株式会社
住宅設備機器
8日前
株式会社東芝
電子機器
1か月前
個人
リテールレボリューションAIタグ
21日前
株式会社ワコム
電子消去具
1か月前
株式会社アジラ
移動方向推定装置
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ