TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124289
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020238
出願日
2024-02-14
発明の名称
小型電動車両
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60L
9/18 20060101AFI20250819BHJP(車両一般)
要約
【課題】複数の電動駆動装置を備える小型電動車両の全体の構成を簡素化する。
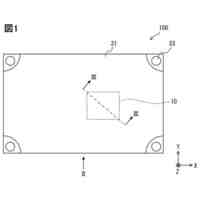
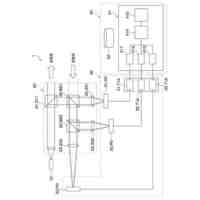
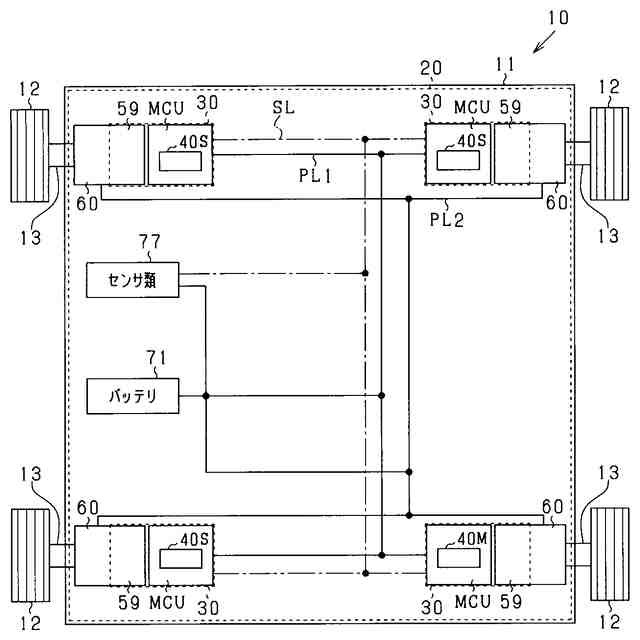
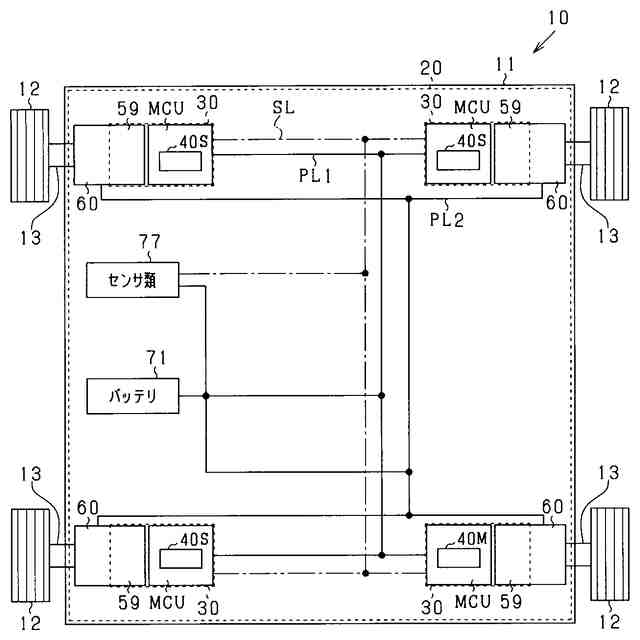
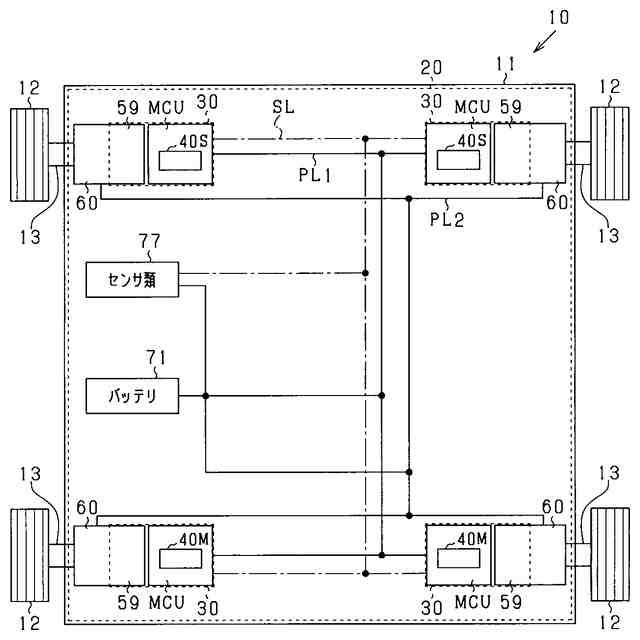
【解決手段】小型電動車両(10)は、蓄電部(71)と、小型電動車両の複数の駆動輪(12)をそれぞれ駆動する複数の駆動装置(30)と、を備える。各駆動装置は、駆動輪を回転させる動力を発生するモータと、蓄電部から供給される電力を変換してモータへ供給するインバータと、インバータを制御するコントローラ(40S,40M)と、を備える。少なくとも1つの駆動装置のコントローラである主コントローラ(40M)は、複数の駆動装置を制御する機能の少なくとも一部を有する。複数の駆動装置のコントローラは、主コントローラからの指令に基づいて、自身に対応するインバータを制御する。
【選択図】 図1
特許請求の範囲
【請求項1】
蓄電部(71)と、小型電動車両(10,110)の複数の駆動輪(12)をそれぞれ駆動する複数の駆動装置(30)と、を備える小型電動車両であって、
各駆動装置は、
前記駆動輪を回転させる動力を発生するモータ(31)と、
前記蓄電部から供給される電力を変換して前記モータへ供給するインバータ(34)と、
前記インバータを制御するコントローラ(40S,40M)と、
を備え、
少なくとも1つの前記駆動装置の前記コントローラである主コントローラ(40M)は、前記複数の駆動装置を制御する機能の少なくとも一部を有し、
前記複数の駆動装置の前記コントローラは、前記主コントローラからの指令に基づいて、自身に対応する前記インバータを制御する、小型電動車両。
続きを表示(約 890 文字)
【請求項2】
前記主コントローラ(40M)と、前記主コントローラ以外の前記コントローラ(40S)とは、デジタル通信により通信を実行する、請求項1に記載の小型電動車両。
【請求項3】
各駆動装置は、前記蓄電部から前記インバータへ電力を供給するオン状態と前記電力を遮断するオフ状態とに切り替え可能な所定リレー(32,33)を備える、請求項1又は2に記載の小型電動車両。
【請求項4】
各駆動装置は、前記モータの回転角度を検出する角度センサ(42)を備え、前記コントローラは、前記角度センサにより検出された前記回転角度に基づいて、前記モータの回転速度を算出する、請求項1又は2に記載の小型電動車両。
【請求項5】
前記主コントローラを少なくとも2つ備え、
前記少なくとも2つの前記主コントローラは、互いの前記指令を相互監視した結果に基づいて、前記複数の駆動装置の前記コントローラに対する前記指令を決定する、請求項1又は2に記載の小型電動車両。
【請求項6】
前記主コントローラを1つのみ備え、
前記主コントローラは、前記複数の駆動装置を制御する機能の全てを有する、請求項1又は2に記載の小型電動車両。
【請求項7】
前記駆動装置を少なくとも4つ備え、
前記主コントローラは、前記複数の駆動装置を互いに接続する信号線の長さの合計が最も短くなる前記コントローラである、請求項6に記載の小型電動車両。
【請求項8】
前記主コントローラが前記指令を送信するタイミングと前記主コントローラ以外の前記コントローラが前記指令を受信するタイミングとの差を補正するように前記指令を補正する同期補正器(40d)を備える、請求項1又は2に記載の小型電動車両。
【請求項9】
前記小型電動車両は、前記駆動輪として前輪及び後輪を備え、
前記主コントローラは、前記後輪を駆動する前記駆動装置の前記コントローラである、請求項1又は2に記載の小型電動車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、小型電動車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
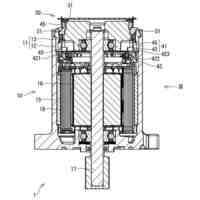
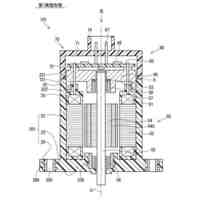
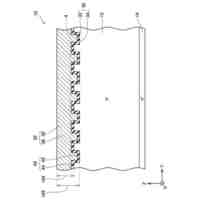
例えば、電動車椅子の左の後輪を駆動する第1電動駆動装置と、右の後輪を駆動する第2電動駆動装置とを備える駆動ユニットがある(特許文献1参照)。特許文献1に記載の電動駆動装置は、モータ及び減速装置を備え、減速装置と一体化されたモータハウジングに、ロータ、ステータ、及び電力変換器を収容している。このため、特許文献1によれば、ステータ巻線と電力変換器とを電気的に接続する配線もモータハウジングに収容でき、電動駆動装置の構成を簡素化することができるとしている。
【先行技術文献】
【特許文献】
【0003】
特開2023-102121号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、複数の電動駆動装置を備える小型電動車両の全体では、複数の電動駆動装置を制御する上位コントローラや、複数の電動駆動装置へ電力をまとめて供給及び遮断するリレー、各モータの回転速度を検出する回転速度センサ等が設けられることが多い。このため、複数の電動駆動装置を備える小型電動車両の全体の構成を簡素化する上では、特許文献1に記載の駆動ユニットは未だ改善の余地がある。
【0005】
本発明は、上記課題を解決するためになされたものであり、その主たる目的は、複数の電動駆動装置を備える小型電動車両の全体の構成を簡素化することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、
蓄電部(71)と、小型電動車両(10,110)の複数の駆動輪(12)をそれぞれ駆動する複数の駆動装置(30)と、を備える小型電動車両であって、
各駆動装置は、
前記駆動輪を回転させる動力を発生するモータ(31)と、
前記蓄電部から供給される電力を変換して前記モータへ供給するインバータ(34)と、
前記インバータを制御するコントローラ(40S,40M)と、
を備え、
少なくとも1つの前記駆動装置の前記コントローラである主コントローラ(40M)は、前記複数の駆動装置を制御する機能の少なくとも一部を有し、
前記複数の駆動装置の前記コントローラは、前記主コントローラからの指令に基づいて、自身に対応する前記インバータを制御する。
【0007】
上記構成によれば、小型電動車両は、蓄電部と、小型電動車両の複数の駆動輪をそれぞれ駆動する複数の駆動装置と、を備えている。各駆動装置は、前記駆動輪を回転させる動力を発生するモータと、前記蓄電部から供給される電力を変換して前記モータへ供給するインバータと、前記インバータを制御するコントローラと、を備えている。このため、各駆動装置の各コントローラが対応する各インバータを制御することにより、各駆動装置の各モータにより各駆動輪を駆動して、小型電動車両の走行状態を制御することができる。
【0008】
ここで、仮に上位コントローラが複数の駆動装置を制御する機能の全てを有する場合は、上位コントローラに必要な機能及び構成部品が多くなり、小型電動車両の全体の構成が過剰になるおそれがある。この点、少なくとも1つの前記駆動装置の前記コントローラである主コントローラは、前記複数の駆動装置を制御する機能の少なくとも一部を有している。そして、前記複数の駆動装置の前記コントローラは、前記主コントローラからの指令に基づいて、自身に対応する前記インバータを制御する。このため、上位コントローラに必要な機能及び構成部品を減らしたり、上位コントローラそのものをなくしたりすることができる。したがって、複数の電動駆動装置を備える小型電動車両の全体の構成を簡素化することができる。
【図面の簡単な説明】
【0009】
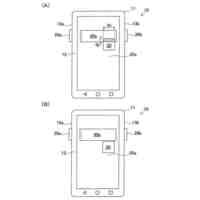
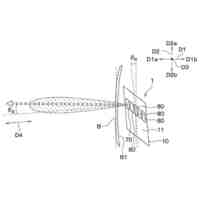
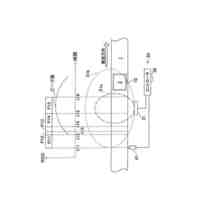
無人搬送車の模式図。
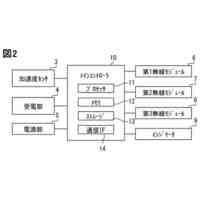
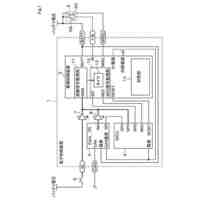
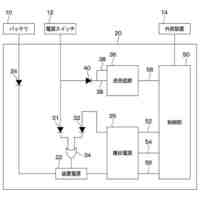
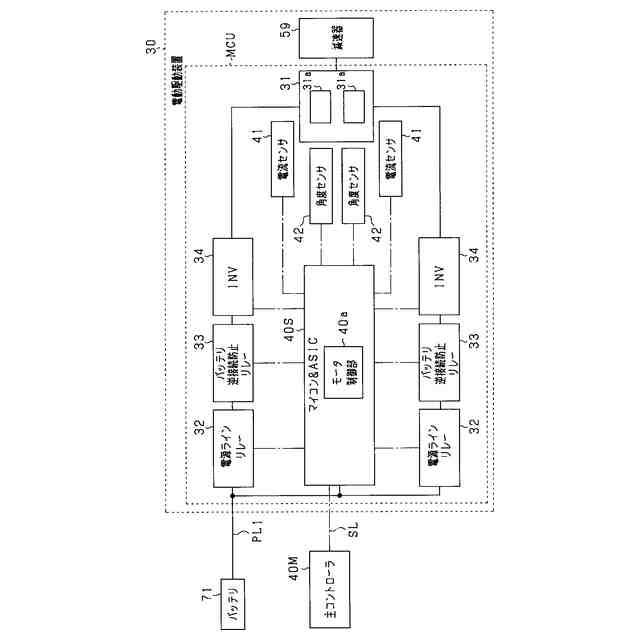
副コントローラを備える電動駆動装置及びその周辺構成を示すブロック図。
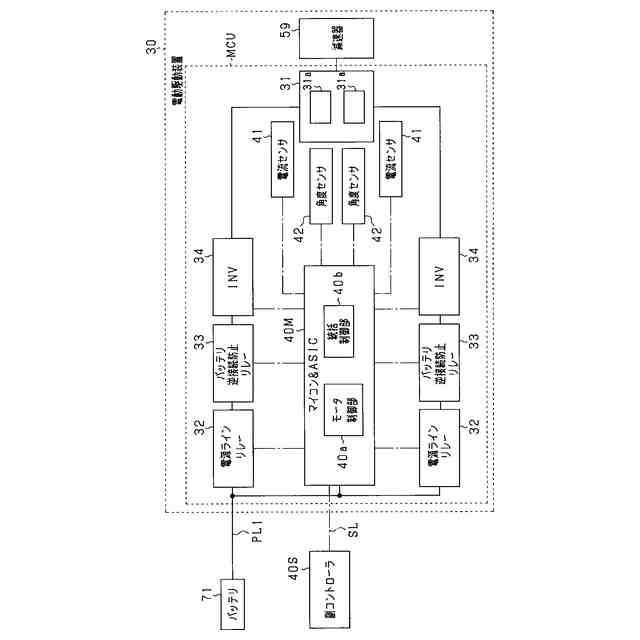
主コントローラを備える電動駆動装置及びその周辺構成を示すブロック図。
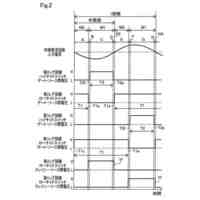
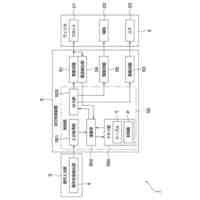
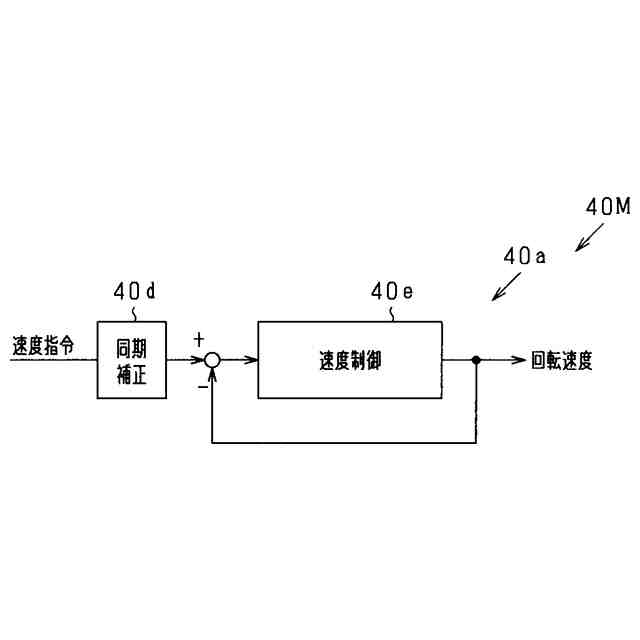
主コントローラの速度指令を同期補正する態様を示すブロック図。
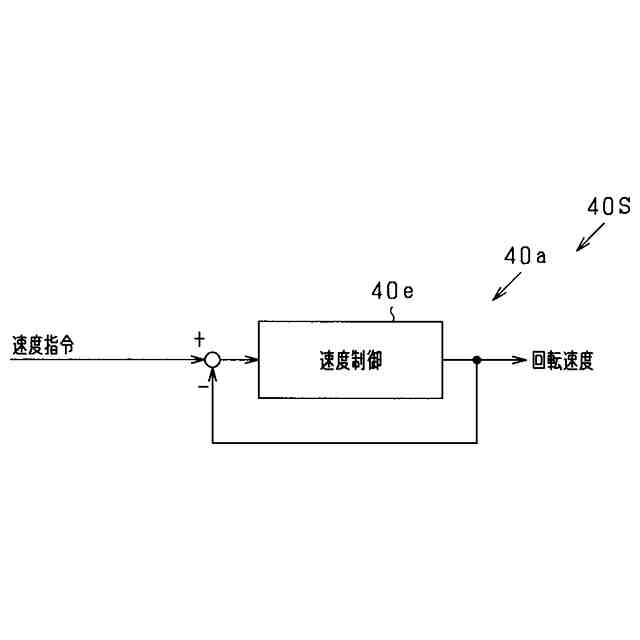
副コントローラの速度指令を補正しない態様を示すブロック図。
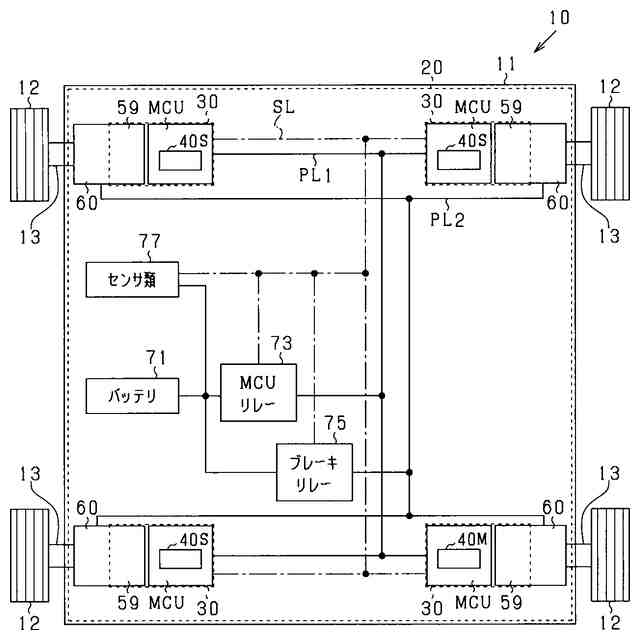
無人搬送車の変更例の模式図。
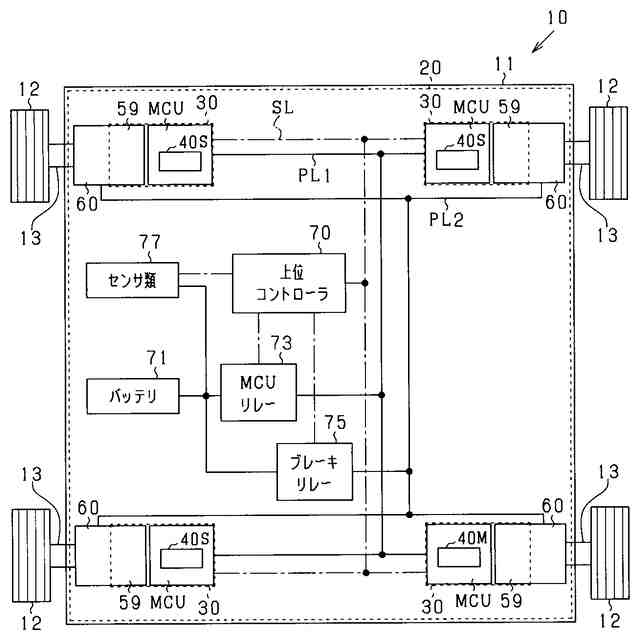
無人搬送車の他の変更例の模式図。
無人搬送車の他の変更例の模式図。
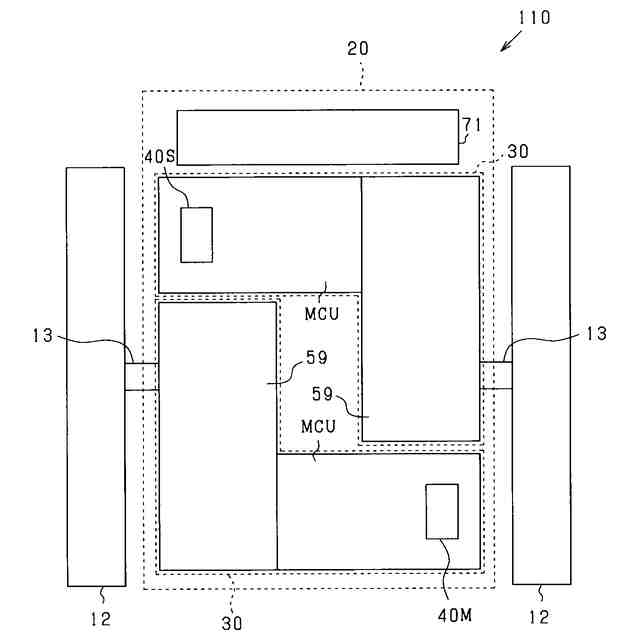
電動車椅子の模式図。
【発明を実施するための形態】
【0010】
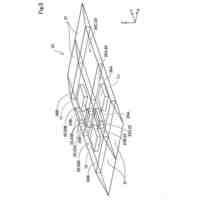
以下、無人搬送車(小型電動車両)に具現化した一実施形態について、図面を参照しつつ説明する。無人搬送車は、例えば工場や倉庫等において磁気テープ(磁気ライン)により誘導されるAGV(Automatic Guided Vehicle)である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
22日前
株式会社デンソー
駆動装置
25日前
株式会社デンソー
ステータ
10日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
送電装置
11日前
株式会社デンソー
ステータ
15日前
株式会社デンソー
電子装置
15日前
株式会社デンソーウェーブ
携帯端末
17日前
株式会社デンソー
電子装置
8日前
株式会社デンソー
電子機器
22日前
株式会社デンソー
圧電素子
24日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
駆動装置
25日前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
通信装置
29日前
株式会社デンソー
光学部材
29日前
株式会社デンソー
測距装置
1日前
株式会社デンソー
電子装置
26日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
8日前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
点火プラグ
10日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
熱音響装置
15日前
株式会社デンソー
電子制御装置
10日前
株式会社デンソー
アクセル装置
16日前
株式会社デンソーエレクトロニクス
点灯制御装置
1か月前
株式会社デンソーウェーブ
無線通信装置
1か月前
株式会社デンソーウェーブ
光学読取装置
18日前
株式会社デンソー
電子制御装置
18日前
株式会社デンソーテン
電源制御装置
18日前
株式会社デンソー
特性補償回路
23日前
株式会社デンソー
電力変換装置
26日前
株式会社デンソー
電子制御装置
8日前
株式会社デンソー
中継システム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ