TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124568
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024094153
出願日
2024-06-11
発明の名称
電子装置及びその制御方法
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
弁理士法人共生国際特許事務所
主分類
G01C
21/34 20060101AFI20250819BHJP(測定;試験)
要約
【課題】ロボットが目標客体まで移動するための電子装置及び方法を提供する。
【解決手段】目標客体にロボットを移動させる移動命令を識別したことに基づいて、セマンティックマップから、目標客体の位置を基準として予め設定された距離として識別される領域のうちの移動命令に応じてロボットが位置することが可能な候補領域を含むサブマップを獲得し、ロボットの大きさをサブマップに適用して獲得されたロボットのフットプリントに基づいて候補領域を複数のセルに分割し、複数のセルのそれぞれのコストに関する第1入力、複数のセルのそれぞれと目標客体との距離に関する第2入力、複数のセルのそれぞれとロボットとの距離に関する第3入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて複数のセルのうちから移動命令の目的地であるターゲットセルを決定する。
【選択図】図1
特許請求の範囲
【請求項1】
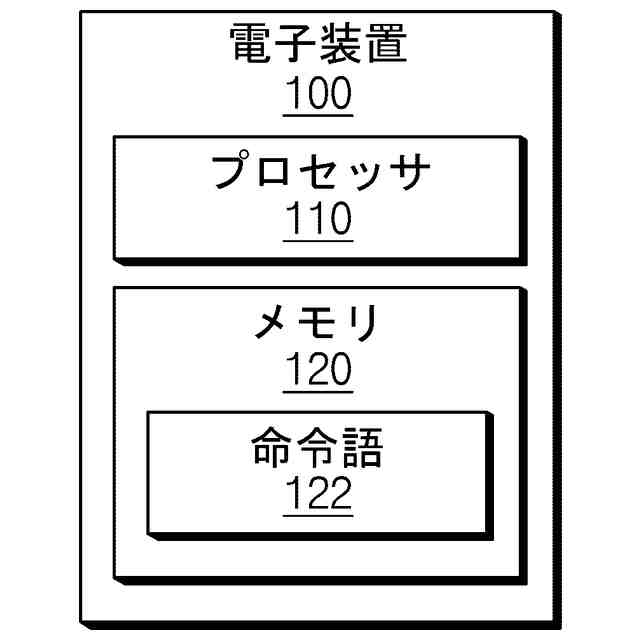
コンピュータで実行可能な命令語(computer-executable instructions)を格納したメモリと、
前記メモリにアクセス(access)して前記命令語を実行する少なくとも1つ以上のプロセッサと、を備え、
前記少なくとも1つ以上のプロセッサは、
命令データから目標客体(object)にロボットを移動させる移動命令を識別したことに基づいて、セマンティックマップ(semantic map)から、前記目標客体の位置を基準として予め設定された距離として識別される領域のうちの前記移動命令に応じて前記ロボットが位置することが可能な候補領域を含むサブマップを獲得し、
前記ロボットの大きさを前記サブマップに適用して獲得された前記ロボットのフットプリント(footprint)に基づいて前記候補領域を複数のセル(cell)に分割し、
前記複数のセルのそれぞれのコストに関する第1入力、前記複数のセルのそれぞれと前記目標客体との距離に関する第2入力、前記複数のセルのそれぞれと前記ロボットとの距離に関する第3入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記複数のセルのうちから前記移動命令の目的地であるターゲットセルを決定することを特徴とする電子装置。
続きを表示(約 2,100 文字)
【請求項2】
前記少なくとも1つ以上のプロセッサは、
前記移動命令から前記目標客体を認識し、
前記目標客体を前記セマンティックマップに適用して前記セマンティックマップで表される前記目標客体の位置を獲得し、
ライダー(LiDAR)センサを介して生成されたマップ基盤のグローバルコストマップ(global cost map)に基づいて前記セマンティックマップに含まれる障害物を識別し、
前記セマンティックマップで前記識別された障害物を除外した領域を前記候補領域として決定することを特徴とする請求項1に記載の電子装置。
【請求項3】
前記少なくとも1つ以上のプロセッサは、
前記ロボットの大きさを前記サブマップの座標系に遷移(transition)させて前記サブマップで前記ロボットの大きさを示す前記フットプリントを獲得し、
前記フットプリントの大きさに基づいて前記候補領域を前記ロボットが位置することが可能な前記複数のセルに分割することを特徴とする請求項1に記載の電子装置。
【請求項4】
前記少なくとも1つ以上のプロセッサは、
前記ターゲットセルを決定するための加重値グループを受信し、
前記加重値グループから第1加重値、第2加重値、及び第3加重値を識別し、
前記第1入力に前記第1加重値を適用した値、前記第2入力に前記第2加重値を適用した値、前記第3入力に前記第3加重値を適用した値、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記ターゲットセルを決定することを特徴とする請求項1に記載の電子装置。
【請求項5】
前記少なくとも1つ以上のプロセッサは、
前記サブマップを、ライダーセンサを介して生成されたマップ基盤のグローバルコストマップに適用して前記複数のセルのそれぞれのコストを獲得し、
前記複数のセルのうちの任意のセル(temporary cell)のコストと予め設定されたコストとの比較に基づいて前記第1入力に含まれる前記任意のセルの第1サブ入力を決定し、
前記任意のセルの中心位置と前記目標客体の位置との直線距離である第1距離に基づいて前記第2入力に含まれる前記任意のセルの第2サブ入力を決定し、
前記ロボットが前記任意のセルの中心位置に移動する経路に関する経路距離である第2距離に基づいて前記第3入力に含まれる前記任意のセルの第3サブ入力を決定し、
前記第1サブ入力、前記第2サブ入力、前記第3サブ入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記任意のセルの移動コストを決定することを特徴とする請求項1に記載の電子装置。
【請求項6】
前記少なくとも1つ以上のプロセッサは、
前記セマンティックマップにおける前記目標客体の位置及び前記ロボットの位置を識別し、
前記任意のセルの中心位置と前記目標客体の位置との直線距離を前記第1距離として決定し、
前記任意のセルの中心位置及び前記ロボットの位置を、経路を算出するように学習された経路生成モデルに適用して前記ロボットが前記任意のセルの中心位置に移動する経路を獲得し、
前記経路生成モデルから獲得された経路の長さを前記第2距離として決定することを特徴とする請求項5に記載の電子装置。
【請求項7】
前記少なくとも1つ以上のプロセッサは、前記複数のセルに含まれる全てのセルの移動コストが決定されたことに基づいて、前記複数のセルのうちから移動コストが最も低いセルを前記ターゲットセルとして決定することを特徴とする請求項5に記載の電子装置。
【請求項8】
前記少なくとも1つ以上のプロセッサは、前記ターゲットセルが決定されたことに基づいて前記ロボットが前記ターゲットセルの中心位置に移動するように前記ロボットを制御することを特徴とする請求項1に記載の電子装置。
【請求項9】
前記少なくとも1つ以上のプロセッサは、
前記ロボットが前記ターゲットセルの中心位置に移動するように前記ロボットを制御する時点から、前記ロボットに含まれるセンサを介して生成されたマップ基盤のローカルコストマップ(local cost map)を獲得し、
前記ローカルコストマップに基づいて前記ロボットの位置を基準として予め設定された距離として識別される領域に存在する障害物を識別することを特徴とする請求項8に記載の電子装置。
【請求項10】
前記少なくとも1つ以上のプロセッサは、
前記ローカルコストマップから前記障害物を識別したことに基づいて、前記ロボットが前記ターゲットセルの中心位置に移動する経路に前記障害物が含まれるか否かを判定し、
前記障害物が前記ロボットの経路に含まれることに基づいて、前記ロボットの位置を基準として前記複数のセルのうちから前記移動命令の目的地であるターゲットセルを再決定することを特徴とする請求項9に記載の電子装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子装置及びその制御方法に関し、より詳細には、目標客体に移動せよという命令を受けたときにより正確にロボットが目標客体まで移動するための技術に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
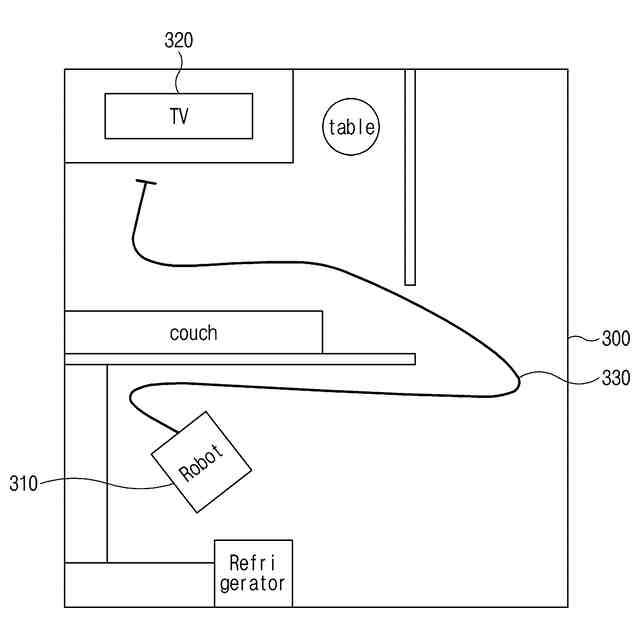
最近、ロボットが一般の使用者とより多様な方式で相互作用を遂行するための方法の中の1つとして、目標客体を探索して目標客体まで移動する技術がある。しかし、ロボットの移動の場合、目的地点に対する入力値は目標客体(object)であってよいが、最終的に移動すべき目標位置は地点(point)として計算されてロボットに伝達されなければならない。また、到着しようとする客体或いは物体の位置が変更された場合、事前に定義された地点ではなく、実時間で変更された目標客体の位置を反映して最終目的位置を計算して正確な最終目的位置を推定する必要がある。
【0003】
このような問題点を解決するため、目標物体を識別して目標物体の周辺領域を設定し、ロボットと目標物体との距離に応じて目的地である1つの地点を決定し、移動中に識別される障害物に応じて目的地を再決定する技術の開発が必要である。
【先行技術文献】
【特許文献】
【0004】
特開2022-128579号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の問題点に鑑みてなされたものであって、本発明の目的は、より正確にロボットが目標客体まで移動するための電子装置及びその制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の実施形態は、セマンティックマップ及びコストマップに基づいて獲得されたサブマップにおいて、ロボットが位置可能な複数のセルに分割してセルのコスト及び客体とロボットとの距離に基づいて目的地であるターゲットセルを決定することにより、使用者から目標客体への移動命令を使用者の意図に適合するように遂行することができるようにターゲットセルを決定する電子装置及びその制御方法の提供を図る。
【0007】
また、本発明の実施形態は、ロボットがターゲットセルの中心位置に移動するようにロボットを制御する時点から、ロボットに含まれるセンサを介してマップ基盤のローカルコストマップを生成することにより、ロボットの位置を基準として予め設定された距離に含まれる領域に位置する障害物を識別し、障害物の位置に応じてターゲットセルを再決定することができる電子装置及びその制御方法の提供を図る。
【0008】
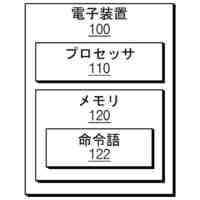
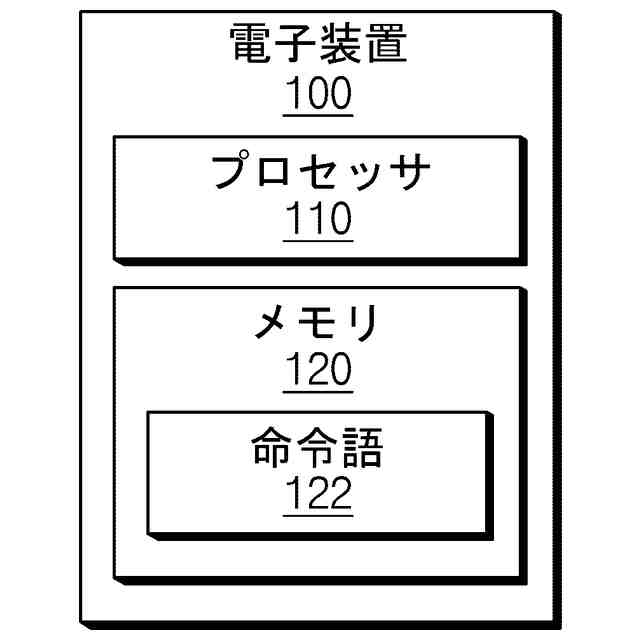
上記目的を達成するためになされた本発明の一態様による電子装置は、コンピュータで実行可能な命令語(computer-executable instructions)を格納したメモリと、前記メモリにアクセス(access)して前記命令語を実行する少なくとも1つ以上のプロセッサと、を備え、前記少なくとも1つ以上のプロセッサは、命令データから目標客体(object)にロボットを移動させる移動命令を識別したことに基づいて、セマンティックマップ(semantic map)から、前記目標客体の位置を基準として予め設定された距離として識別される領域のうちの前記移動命令に応じて前記ロボットが位置することが可能な候補領域を含むサブマップを獲得し、前記ロボットの大きさを前記サブマップに適用して獲得された前記ロボットのフットプリント(footprint)に基づいて前記候補領域を複数のセル(cell)に分割し、前記複数のセルのそれぞれのコストに関する第1入力、前記複数のセルのそれぞれと前記目標客体との距離に関する第2入力、前記複数のセルのそれぞれと前記ロボットとの距離に関する第3入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記複数のセルのうちから前記移動命令の目的地であるターゲットセルを決定する。
【0009】
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記移動命令から前記目標客体を認識し、前記目標客体を前記セマンティックマップに適用して前記セマンティックマップで表される前記目標客体の位置を獲得し、ライダー(LiDAR)センサを介して生成されたマップ基盤のグローバルコストマップ(global cost map)に基づいて前記セマンティックマップに含まれる障害物を識別し、前記セマンティックマップで前記識別された障害物を除外した領域を前記候補領域として決定する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記ロボットの大きさを前記サブマップの座標系に遷移(transition)させて前記サブマップで前記ロボットの大きさを示す前記フットプリントを獲得し、前記フットプリントの大きさに基づいて前記候補領域を前記ロボットが位置することが可能な前記複数のセルに分割する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記ターゲットセルを決定するための加重値グループを受信し、前記加重値グループから第1加重値、第2加重値、及び第3加重値を識別し、前記第1入力に前記第1加重値を適用した値、前記第2入力に前記第2加重値を適用した値、前記第3入力に前記第3加重値を適用した値、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記ターゲットセルを決定する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記サブマップを、ライダーセンサを介して生成されたマップ基盤のグローバルコストマップに適用して前記複数のセルのそれぞれのコストを獲得し、前記複数のセルのうちの任意のセル(temporary cell)のコストと予め設定されたコストとの比較に基づいて前記第1入力に含まれる前記任意のセルの第1サブ入力を決定し、前記任意のセルの中心位置と前記目標客体の位置との直線距離である第1距離に基づいて前記第2入力に含まれる前記任意のセルの第2サブ入力を決定し、前記ロボットが前記任意のセルの中心位置に移動する経路に関する経路距離である第2距離に基づいて前記第3入力に含まれる前記任意のセルの第3サブ入力を決定し、前記第1サブ入力、前記第2サブ入力、前記第3サブ入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記任意のセルの移動コストを決定する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記セマンティックマップにおける前記目標客体の位置及び前記ロボットの位置を識別し、前記任意のセルの中心位置と前記目標客体の位置との直線距離を前記第1距離として決定し、前記任意のセルの中心位置及び前記ロボットの位置を、経路を算出するように学習された経路生成モデルに適用して前記ロボットが前記任意のセルの中心位置に移動する経路を獲得し、前記経路生成モデルから獲得された経路の長さを前記第2距離として決定する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記複数のセルに含まれる全てのセルの移動コストが決定されたことに基づいて、前記複数のセルのうちから移動コストが最も低いセルを前記ターゲットセルとして決定する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記ターゲットセルが決定されたことに基づいて前記ロボットが前記ターゲットセルの中心位置に移動するように前記ロボットを制御する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記ロボットが前記ターゲットセルの中心位置に移動するように前記ロボットを制御する時点から、前記ロボットに含まれるセンサを介して生成されたマップ基盤のローカルコストマップ(local cost map)を獲得し、前記ローカルコストマップに基づいて、前記ロボットの位置を基準として予め設定された距離として識別される領域に存在する障害物を識別する。
一実施形態において、前記少なくとも1つ以上のプロセッサは、前記ローカルコストマップから前記障害物を識別したことに基づいて、前記ロボットが前記ターゲットセルの中心位置に移動する経路に前記障害物が含まれるか否かを判定し、前記障害物が前記ロボットの経路に含まれることに基づいて、前記ロボットの位置を基準として前記複数のセルのうちから前記移動命令の目的地であるターゲットセルを再決定する。
【0010】
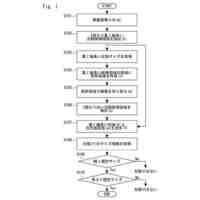
上記目的を達成するためになされた本発明の一態様による少なくとも1つ以上のプロセッサを含む電子装置の制御方法は、命令データから目標客体(object)にロボットを移動させる移動命令を識別したことに基づいて、セマンティックマップ(semantic map)から、前記目標客体の位置を基準として予め設定された距離として識別される領域のうちの前記移動命令に応じて前記ロボットが位置することが可能な候補領域を含むサブマップを獲得する段階と、前記ロボットの大きさを前記サブマップに適用して獲得された前記ロボットのフットプリント(footprint)に基づいて前記候補領域を複数のセル(cell)に分割する段階と、前記複数のセルのそれぞれのコストに関する第1入力、前記複数のセルのそれぞれと前記目標客体との距離に関する第2入力、前記複数のセルのそれぞれと前記ロボットとの距離に関する第3入力、又はこれらのいずれかの組み合わせのうちの少なくとも1つ以上に基づいて前記複数のセルのうちから前記移動命令の目的地であるターゲットセルを決定する段階を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
現代自動車株式会社
電子装置及びその制御方法
2日前
ユニパルス株式会社
力変換器
20日前
横浜ゴム株式会社
音響窓
22日前
三菱電機株式会社
計測器
14日前
株式会社豊田自動織機
産業車両
27日前
株式会社辰巳菱機
システム
8日前
株式会社国際電気
試験装置
1か月前
個人
センサーを備えた装置
24日前
日置電機株式会社
測定装置
21日前
IPU株式会社
距離検出装置
20日前
日本精機株式会社
施工管理システム
24日前
株式会社FRPカジ
FRP装置
10日前
株式会社東芝
センサ
23日前
株式会社CAST
センサ固定治具
27日前
株式会社カワタ
サンプリング装置
3日前
大和製衡株式会社
組合せ計量装置
10日前
富士レビオ株式会社
嵌合システム
13日前
TDK株式会社
ガスセンサ
2日前
学校法人立命館
液面レベルセンサ
7日前
株式会社田中設備
報知装置
28日前
日本精工株式会社
分注装置
6日前
株式会社精工技研
光電圧プローブ
今日
本多電子株式会社
超音波ソナー装置
15日前
アズビル株式会社
火炎状態判定装置
21日前
富士電機株式会社
半導体パッケージ
16日前
WOTA株式会社
液位検出システム
1か月前
日本装置開発株式会社
X線検査装置
1か月前
オムロン株式会社
スイッチング装置
1か月前
三菱マテリアル株式会社
温度センサ
6日前
株式会社熊平製作所
刃物類判別装置
27日前
戸田建設株式会社
測量機
6日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
1か月前
東ソー株式会社
クロマトグラムの形状判定方法
16日前
已久工業股ふん有限公司
空気圧縮機構造
23日前
三和テッキ株式会社
架線の高さ、偏位測定装置
8日前
トヨタ自動車株式会社
表面傷の検査方法
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ