TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129466
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026112
出願日
2024-02-26
発明の名称
固相接合装置および固相接合システム
出願人
株式会社ダイヘン
代理人
弁理士法人深見特許事務所
主分類
B23K
20/00 20060101AFI20250829BHJP(工作機械;他に分類されない金属加工)
要約
【課題】固相接合において接合不良とならない位置に適切に位置決めする。
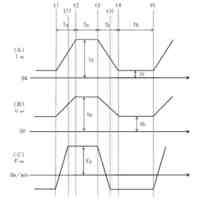
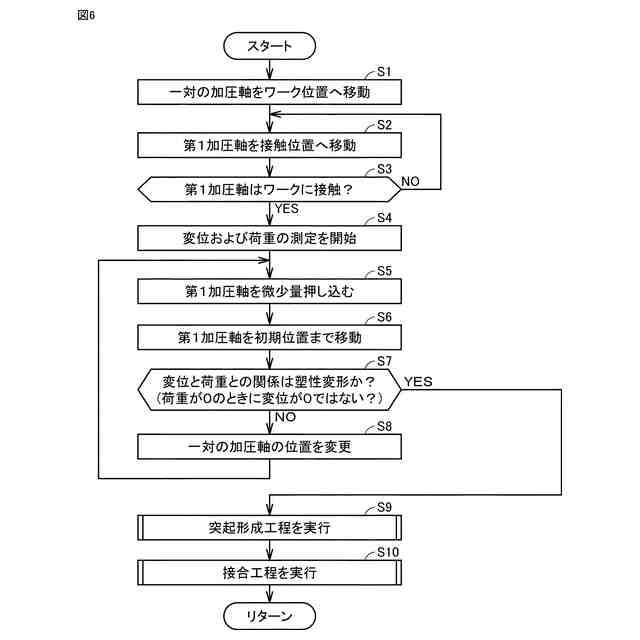
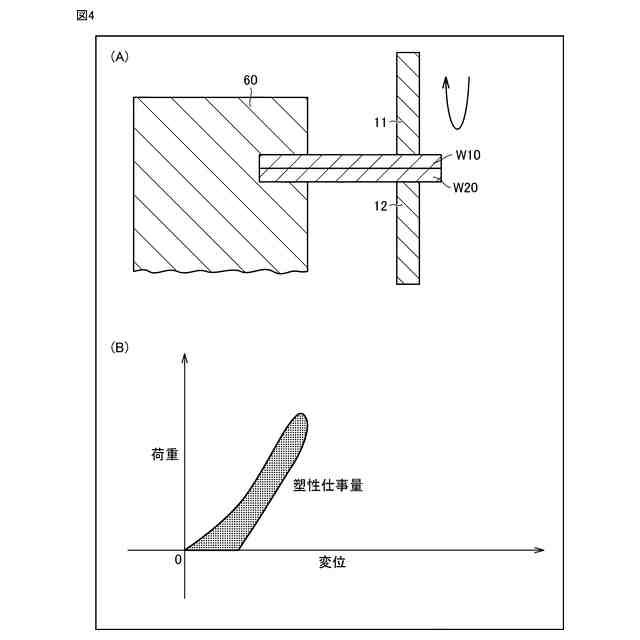
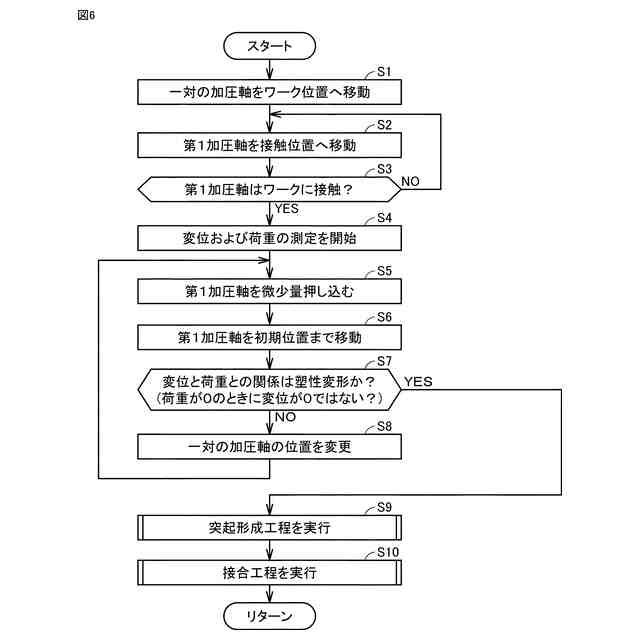
【解決手段】第1加圧軸11は、第2加圧軸12に対し相対的に移動可能である。第1加圧軸11を第1ワークW10に押し込んだ後に、第1加圧軸11が押圧方向と逆方向へ移動したときの第1加圧軸11の変位と検出装置が検出する荷重とを記憶する記憶装置33をさらに備える。制御装置30は、記憶装置33に記憶された変位と荷重との履歴から第1ワークW10および第2ワークW20が塑性変形したか否かを判定する。
【選択図】図6
特許請求の範囲
【請求項1】
導電性があり厚み方向に重なる第1ワークおよび第2ワークを固相状態で接合する固相接合装置であって、
前記第1ワークおよび前記第2ワークを厚み方向における両側から押圧する一対の加圧軸と、
前記一対の加圧軸の周囲にそれぞれ配置された一対の電極と、
制御装置と、
前記第1ワークおよび前記第2ワークに加わる荷重を検出する検出装置とを備え、
前記一対の加圧軸は、前記第1ワークを押圧する第1加圧軸と、前記第2ワークを押圧する第2加圧軸を含み、
前記第1加圧軸は、前記第2加圧軸に対し相対的に移動可能であり、
前記第1加圧軸を前記第1ワークに押し込んだ後に、前記第1加圧軸が押圧方向と逆方向へ移動したときの前記第1加圧軸の変位と前記検出装置が検出する前記荷重とを記憶する記憶装置をさらに備え、
前記制御装置は、前記記憶装置に記憶された前記変位と前記荷重との履歴から前記第1ワークおよび前記第2ワークが塑性変形したか否かを判定する、固相接合装置。
続きを表示(約 820 文字)
【請求項2】
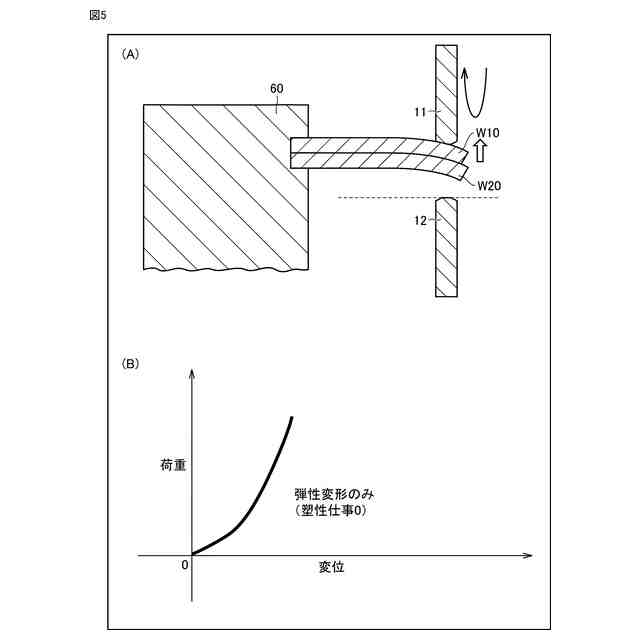
前記制御装置は、前記記憶装置に記憶された前記変位と前記荷重との履歴から、前記荷重が0となったタイミングで前記変位が0となっている場合に、前記第1ワークおよび前記第2ワークが塑性変形していないと判定する、請求項1に記載の固相接合装置。
【請求項3】
前記制御装置は、前記記憶装置に記憶された前記変位と前記荷重との履歴から、前記荷重が0となったタイミングで前記変位が0となっていない場合に、前記第1ワークおよび前記第2ワークが塑性変形したと判定する、請求項1に記載の固相接合装置。
【請求項4】
前記制御装置は、前記第1ワークおよび前記第2ワークが塑性変形していないと判定した場合、前記一対の加圧軸の位置を変更する、請求項2に記載の固相接合装置。
【請求項5】
前記制御装置は、前記第1ワークおよび前記第2ワークが塑性変形していると判定した場合、前記第1ワークと前記第2ワークとの接触部に突起が形成されるように、前記第1加圧軸を前記第1ワークに対して押し込む、請求項3に記載の固相接合装置。
【請求項6】
前記一対の電極の端部は、前記第1ワークおよび前記第2ワークを押圧していない状態において、前記一対の加圧軸の端部よりも前記第1ワークおよび前記第2ワークの方向へ突出している、請求項1から請求項5のいずれか1項に記載の固相接合装置。
【請求項7】
前記固相接合装置は、ロボットアームの先端に取り付けられる、請求項1から請求項5のいずれか1項に記載の固相接合装置。
【請求項8】
請求項1に記載の前記固相接合装置と、
ロボットアームを有するロボットとを備え、
前記制御装置は、前記ロボットアームを前記第1ワークおよび前記第2ワークへ移動した後、前記第1加圧軸を前記第1ワークに対して押し込む、固相接合システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、固相接合装置、および固相接合装置を備える固相接合システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許第7242112号公報(特許文献1)には、押圧部を含む加圧機構と、一対の溶接電極を含む通電機構とを備える固相点接合装置が開示されている。特許第7242112号公報(特許文献1)に開示された固相点接合装置は、一対の溶接電極によって2枚の金属板材に通電して各金属板材を加熱した状態で、押圧部によって2枚の金属板材を当該金属板材と直交する方向に押圧するように構成されている。特許第7242112号公報(特許文献1)に開示されたような、金属を溶融させずに低温域の固相状態で接合する接合方法(以下、「固相接合」とも称する。)をロボットアームを備えるシステムに適用する場合、接合不良を防止すために接合工程を開始する際の位置決めが重要となる。
【0003】
特開2008-307595号公報(特許文献2)には、スポット溶接ロボットの位置決め方法について開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7242112号公報
特開2008-307595号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特開2008-307595号公報(特許文献2)には、可動側電極チップを駆動するサーボモータの電流値を監視し、電流値が所定の値を超えたときを可動側電極チップの先端が被溶接物に接触したと見なすことで位置決めをしていた。しかしながら、電極チップは、通電により摩耗が生じる。このため、特開2008-307595号公報(特許文献2)に開示の技術は、正確な位置決めのために補正等の処理をする必要があり、接合不良とならない位置に適切に位置決めすることが困難であった。
【0006】
本開示の目的は、固相接合において接合不良とならない位置に適切に位置決めする技術を提供することである。
【課題を解決するための手段】
【0007】
本開示は、導電性があり厚み方向に重なる第1ワークおよび第2ワークを固相状態で接合する固相接合装置に関する。固相接合装置は、第1ワークおよび第2ワークを厚み方向における両側から押圧する一対の加圧軸と、一対の加圧軸の周囲にそれぞれ配置された一対の電極と、制御装置と、第1ワークおよび第2ワークに加わる荷重を検出する検出装置とを備える。一対の加圧軸は、第1ワークを押圧する第1加圧軸と、第2ワークを押圧する第2加圧軸を含む。第1加圧軸は、第2加圧軸に対し相対的に移動可能である。第1加圧軸を第1ワークに押し込んだ後に、第1加圧軸が押圧方向と逆方向へ移動したときの第1加圧軸の変位と検出装置が検出する荷重とを記憶する記憶装置をさらに備える。制御装置は、記憶装置に記憶された変位と荷重との履歴から第1ワークおよび第2ワークが塑性変形したか否かを判定する。
【0008】
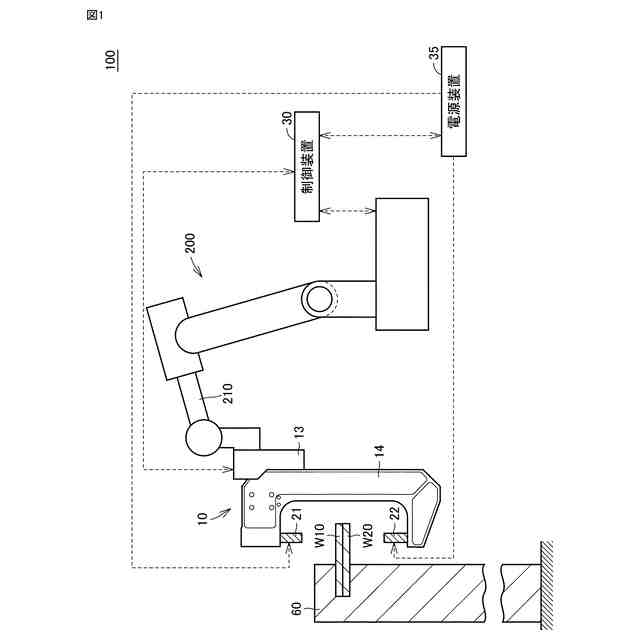
本開示の固相接合システムは、上記に記載の固相接合装置と、ロボットアームを有するロボットとを備える。制御装置は、ロボットアームを第1ワークおよび第2ワークへ移動した後、第1加圧軸を第1ワークに対して押し込む。
【発明の効果】
【0009】
本開示によれば、制御装置は、記憶装置に記憶された変位と荷重との履歴から第1ワークおよび第2ワークが塑性変形したか否かを判定する。このような判定結果を用いることによって、固相接合において接合不良とならない位置に適切に位置決めすることができる。
【図面の簡単な説明】
【0010】
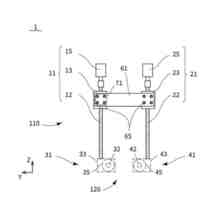
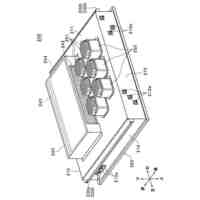
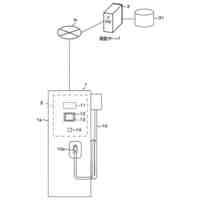
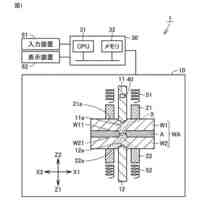
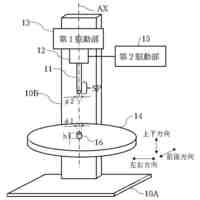
実施の形態1に係る固相接合システムを概略的に示す図である。
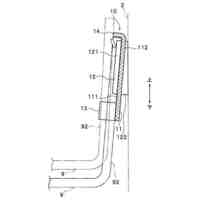
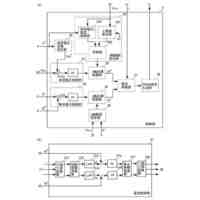
実施の形態1に係る固相接合装置を概略的に示す図である。
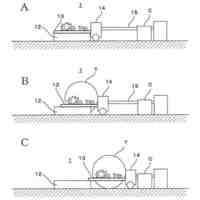
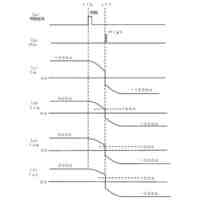
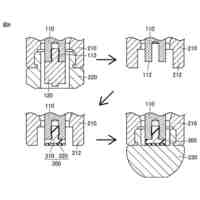
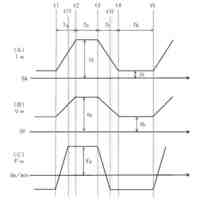
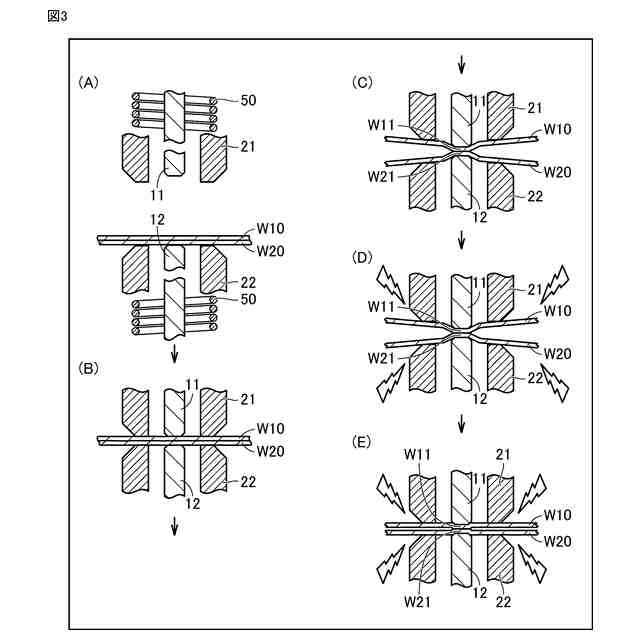
接合工程を説明するための図である。
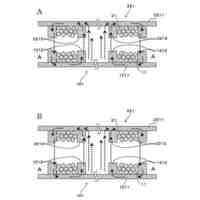
位置決めが正しい場合の様子を説明するための図である。
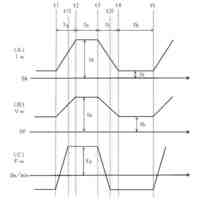
位置決めが正しくない場合の様子を説明するための図である。
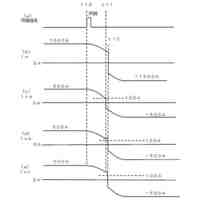
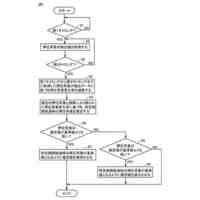
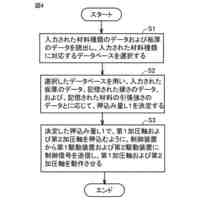
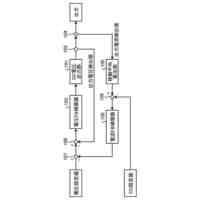
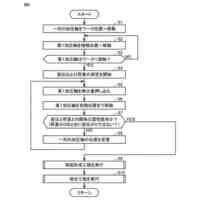
制御装置が実行する制御内容を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
変圧器
1か月前
株式会社ダイヘン
給電装置
1か月前
株式会社ダイヘン
移動装置
10日前
株式会社ダイヘン
電源装置
1か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
固相接合装置
1か月前
株式会社ダイヘン
電力変換装置
5日前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
高周波電源装置
1か月前
株式会社ダイヘン
変換装置集積体
5日前
株式会社ダイヘン
スポット接合装置
1か月前
株式会社ダイヘン
コイル及び電力授受装置
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
サブマージアーク溶接制御方法
3日前
株式会社ダイヘン
交流パルスアーク溶接制御方法
3日前
株式会社ダイヘン
固相接合装置および固相接合方法
1か月前
株式会社ダイヘン
制御回路、および、蓄電池システム
1か月前
株式会社ダイヘン
DC電源装置、およびパルス発生装置
1か月前
株式会社ダイヘン
固相接合装置および固相接合システム
1か月前
株式会社ダイヘン
固相接合装置および固相接合システム
3日前
株式会社ダイヘン
充電予約管理装置及び充電予約管理方法
26日前
株式会社ダイヘン
固相接合装置および固相接合装置の制御方法
3日前
株式会社ダイヘン
集積構造体及びバッテリーパックの集積方法
1か月前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
25日前
株式会社ダイヘン
ベルト伝動機構およびこれを備えた搬送ロボット
14日前
株式会社ダイヘン
ハンド装置、支持用ユニット及びハンド装置の制御方法
10日前
株式会社ダイヘン
無線給電システム
13日前
株式会社ダイヘン
フラットパネル製造システム及びそれに用いられるロボット制御装置
27日前
個人
タップ
4か月前
個人
加工機
3か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
3か月前
株式会社北川鉄工所
回転装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ