TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129667
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026447
出願日
2024-02-26
発明の名称
物体検知システム、物体検知方法、及びプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G01V
3/08 20060101AFI20250829BHJP(測定;試験)
要約
【課題】対象物体を効率的に検知できるようにする。
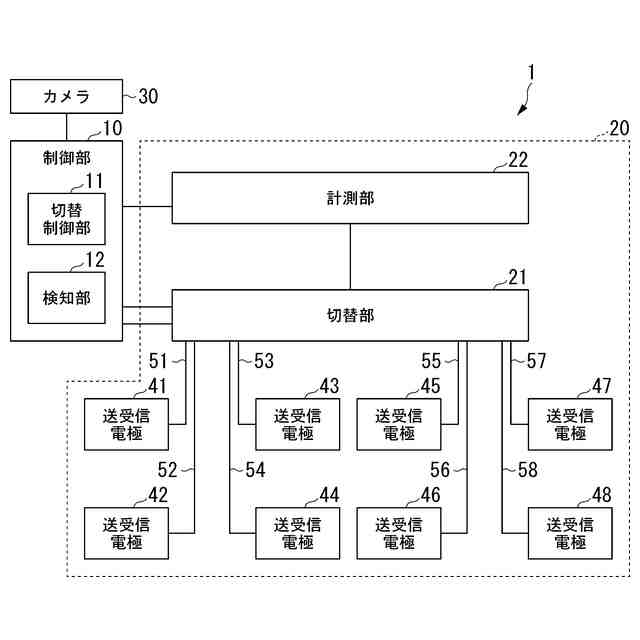
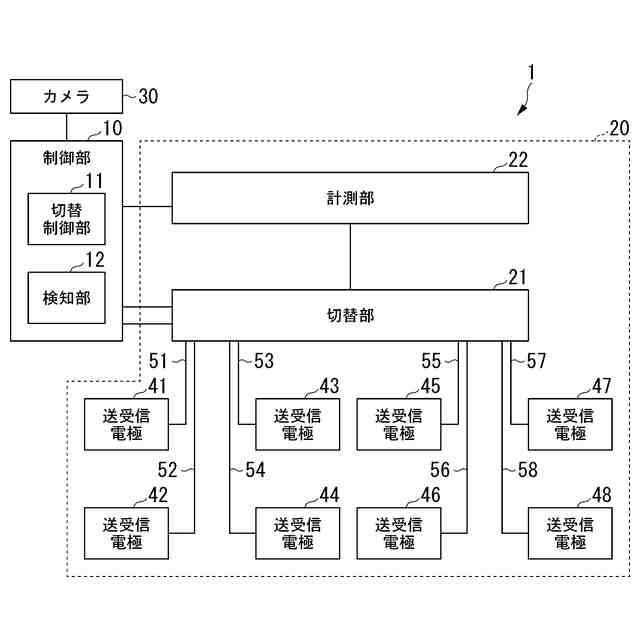
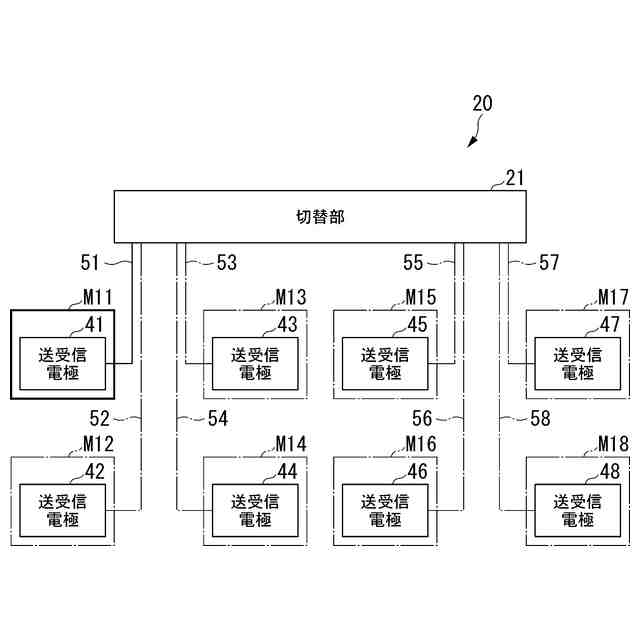
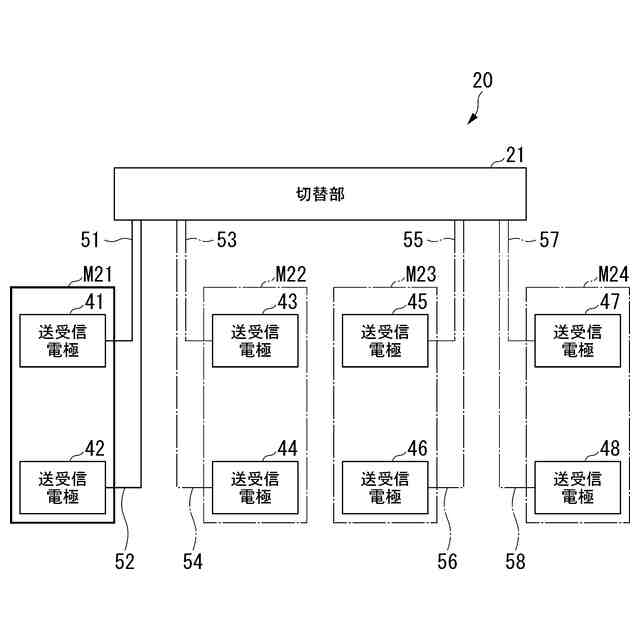
【解決手段】複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する物体検知システムであって、前記複数の電極をつなぐ回路と、複数の前記電極間をつなぐ回路のつなぎ方を切り替える切替部と、前記回路のつなぎ方に関する切替指示を生成して前記切替部に出力する制御部と、をさらに備える、ことを特徴とする物体検知システム。
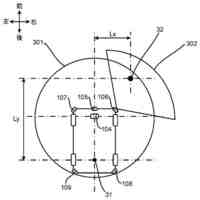
【選択図】図1
特許請求の範囲
【請求項1】
複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する物体検知システムであって、
前記複数の電極をつなぐ回路と、
複数の前記電極間をつなぐ回路のつなぎ方を切り替える切替部と、
前記回路のつなぎ方に関する切替指示を生成して前記切替部に出力する制御部と、をさらに備える、
ことを特徴とする物体検知システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記近接センサの検知結果に基づいて、前記切替指示を生成する、
請求項1に記載の物体検知システム。
【請求項3】
前記制御部は、
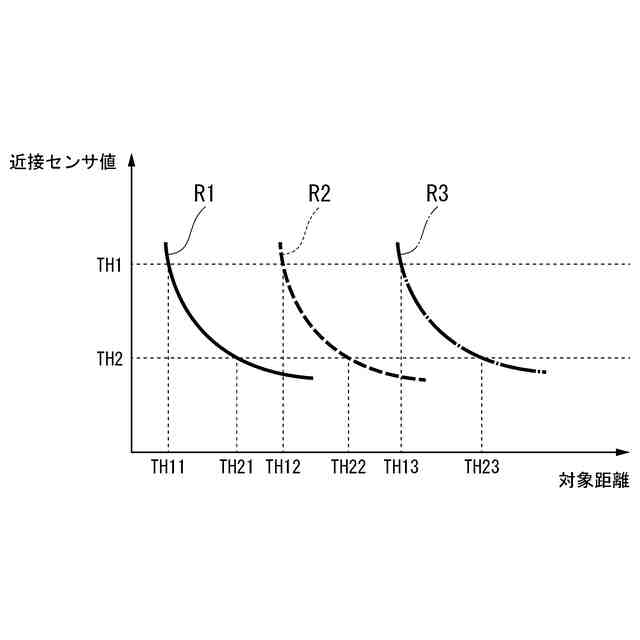
前記対象物体までの距離があらかじめ設定された閾値より小さい場合に、1または接続された複数の前記電極により形成される結合電極の数が増加し、前記結合電極の面積が小さくなるように前記回路のつなぎ方を切り替える前記切替指示を生成し、
前記対象物体までの距離があらかじめ設定された閾値より大きい場合に、1または接続された複数の前記電極により形成される結合電極の数が減少し、前記結合電極の面積が大きくなるように前記回路のつなぎ方を切り替える前記切替指示を生成する、
請求項1に記載の物体検知システム。
【請求項4】
前記電極が前記対象物体を操作するロボットに搭載され、
前記制御部は、
前記対象物体までのアプローチ中は、1または接続された複数の前記電極により形成される結合電極の数が減少し、前記結合電極の面積が大きくなるように前記回路のつなぎ方を切り替える前記切替指示を生成し、
前記対象物体を把持または操作するときには、1または接続された複数の前記電極により形成される結合電極の数が増加し、前記結合電極の面積が小さくなるように前記回路のつなぎ方を切り替える前記切替指示を生成する、
請求項1または2に記載の物体検知システム。
【請求項5】
複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する制御部が、
複数の前記電極間をつなぐ回路のつなぎ方に関する切替指示を生成して切替部に出力し、
1または接続された複数の前記電極により形成される結合電極及び前記結合電極の面積を変更して前記近接センサの感度を制御し、
前記近接センサにより前記対象物体を検知する、
ことを特徴とする物体検知方法。
【請求項6】
複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する制御部に、
複数の前記電極間をつなぐ回路のつなぎ方に関する切替指示を生成して切替部に出力し、
1または接続された複数の前記電極により形成される結合電極及び前記結合電極の面積を変更して前記近接センサの感度を制御し、
前記近接センサにより前記対象物体を検知する、ことを行わせる、
ことを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体検知システム、物体検知方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
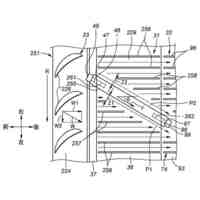
従来、物体の近接の有無及び物体から受ける圧力を検知する静電容量型検知センサがある(例えば、特許文献1参照)。この静電容量型検知センサは一対の第1電極と、基材の接触表面に対して垂直な方向について、一対の第1電極よりも基材の接触表面から遠い位置で、第1電極と重なり、基材を挟んだ状態で配置される一対の第2電極を備える。この静電容量型検知センサでは、一対の第1電極の間の静電容量の測定結果に応じて、基材の接触表面に対する物体の近接状態が検知され、一対の第2電極の間の静電容量の測定結果に応じて、基材の接触表面に接触した物体から基材に作用する圧力が検知される。
【先行技術文献】
【特許文献】
【0003】
特開2021-060211号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
静電容量型近接センサ(静電容量型検知センサ)には、遠くに位置する対象物体を検知する性能(以下、距離性能)と、対象物体の位置を精度よく検知する性能(以下、空間分解能)が求められる。ところが、一般に、距離性能を高めると、空間分解能が低下し、空間分解能を高めると、距離性能が低下し、空間分解能と距離性能の両立を図ることが難しく、対象物体を効率的に検知しにくかった。
【0005】
本発明は、このような事情を考慮してなされたものであり、対象物体を効率的に検知できるようにすることを目的の一つとする。
【課題を解決するための手段】
【0006】
上記課題を解決して係る目的を達成するために、本発明は以下の態様を採用した。
(1):この発明の一態様に係る物体検知システムは、複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する物体検知システムであって、前記複数の電極をつなぐ回路と、複数の前記電極間をつなぐ回路のつなぎ方を切り替える切替部と、前記回路のつなぎ方に関する切替指示を生成して前記切替部に出力する制御部と、をさらに備える、ことを特徴とする。
【0007】
(2):上記(1)の態様において、前記制御部は、前記近接センサの検知結果に基づいて、前記切替指示を生成する、ものである。
【0008】
(3):上記(1)の態様において、前記制御部は、前記対象物体までの距離があらかじめ設定された閾値より小さい場合に、1または接続された複数の前記電極により形成される結合電極の数が増加し、前記結合電極の面積が小さくなるように前記回路のつなぎ方を切り替える前記切替指示を生成し、前記対象物体までの距離があらかじめ設定された閾値より大きい場合に、1または接続された複数の前記電極により形成される結合電極の数が減少し、前記結合電極の面積が大きくなるように前記回路のつなぎ方を切り替える前記切替指示を生成する、ものである。
【0009】
(4):上記(1)または(2)の態様において、前記電極が前記対象物体を操作するロボットに搭載され、前記制御部は、前記対象物体までのアプローチ中は、1または接続された複数の前記電極により形成される結合電極の数が減少し、前記結合電極の面積が大きくなるように前記回路のつなぎ方を切り替える前記切替指示を生成し、前記対象物体を把持または操作するときには、1または接続された複数の前記電極により形成される結合電極の数が増加し、前記結合電極の面積が小さくなるように前記回路のつなぎ方を切り替える前記切替指示を生成する、ものである。
【0010】
(5):この発明の一態様に係る検知方法は、複数の電極を備え、静電容量の変化に基づいて対象物体を検知する近接センサの感度を制御する制御部が、複数の前記電極間をつなぐ回路のつなぎ方に関する切替指示を生成して切替部に出力し、1または接続された複数の前記電極により形成される結合電極及び前記結合電極の面積を変更して前記近接センサの感度を制御し、前記近接センサにより前記対象物体を検知する、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
11日前
本田技研工業株式会社
収納部
1か月前
本田技研工業株式会社
板ばね
1か月前
本田技研工業株式会社
搬送装置
28日前
本田技研工業株式会社
積層装置
1か月前
本田技研工業株式会社
ロボット
1か月前
本田技研工業株式会社
ロボット
9日前
本田技研工業株式会社
回転機械
10日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
鞍乗型車両
29日前
本田技研工業株式会社
触媒インク
11日前
本田技研工業株式会社
触媒インク
11日前
本田技研工業株式会社
電池パック
1か月前
本田技研工業株式会社
作業システム
10日前
本田技研工業株式会社
物体検出装置
21日前
本田技研工業株式会社
電気駆動装置
1か月前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
薄板搬送装置
24日前
本田技研工業株式会社
鞍乗り型車両
10日前
本田技研工業株式会社
導体接合方法
17日前
本田技研工業株式会社
画像処理装置
1か月前
本田技研工業株式会社
位置推定装置
17日前
本田技研工業株式会社
物体検出装置
23日前
本田技研工業株式会社
鞍乗り型車両
15日前
本田技研工業株式会社
体幹用装着具
1か月前
本田技研工業株式会社
車両制御装置
17日前
本田技研工業株式会社
電流検出装置
23日前
本田技研工業株式会社
電力変換装置
22日前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
鞍乗り型車両
10日前
本田技研工業株式会社
位置決め装置
1か月前
本田技研工業株式会社
蓄電システム
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ