TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129729
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026575
出願日
2024-02-26
発明の名称
衝突判定装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01P
15/00 20060101AFI20250829BHJP(測定;試験)
要約
【課題】車両の衝突部位の位置を高精度に判定することができる衝突判定装置を提供する。
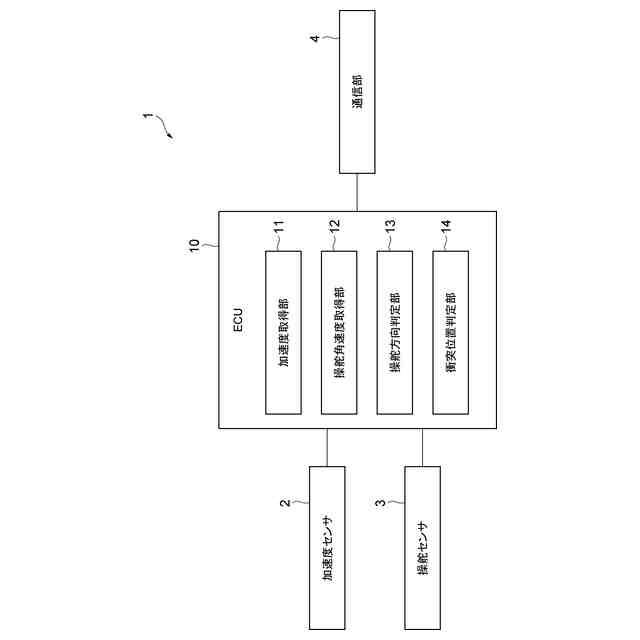
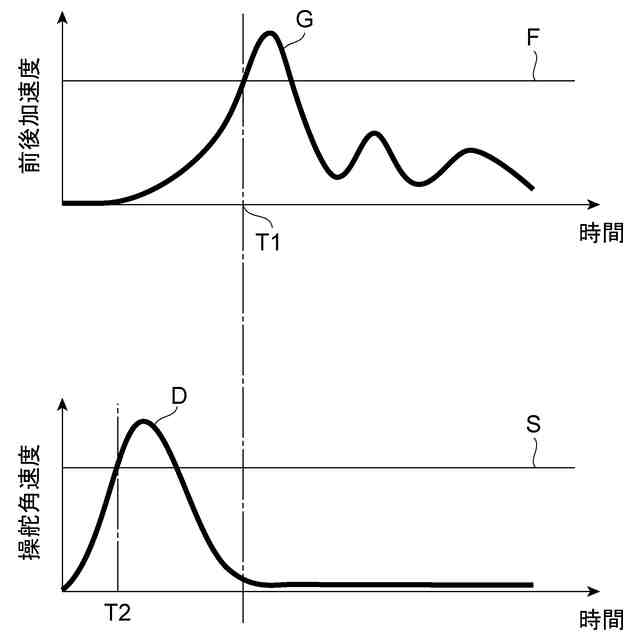
【解決手段】衝突判定装置1は、加速度取得部11と、操舵角速度取得部12と、衝突位置判定部14と、を備えている。加速度取得部11は、車両の加速度センサ2の検出結果に基づいて、車両の前後加速度を取得する。操舵角速度取得部12は、車両の操舵センサ3の検出結果に基づいて、車両の操舵角速度を取得する。衝突位置判定部14は、車両の前後加速度及び車両の操舵角速度に基づいて、車両のうち衝突対象物と衝突した衝突部位の位置を判定する。衝突位置判定部14は、車両の前後加速度が第1閾値を超え且つ車両の前後加速度が第1閾値に達したタイミングよりも前に車両の操舵角速度が第2閾値を超えた場合、衝突部位が車両のうち車両の操舵方向とは反対側に位置していると判定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の前方に位置する衝突対象物への前記車両の衝突を判定する衝突判定装置であって、
前記車両の加速度センサの検出結果に基づいて、前記車両の前後加速度を取得する加速度取得部と、
前記車両の操舵センサの検出結果に基づいて、前記車両の操舵角速度を取得する操舵角速度取得部と、
前記車両の前後加速度及び前記車両の操舵角速度に基づいて、前記車両のうち前記衝突対象物と衝突した衝突部位の位置を判定する衝突位置判定部と、を備え、
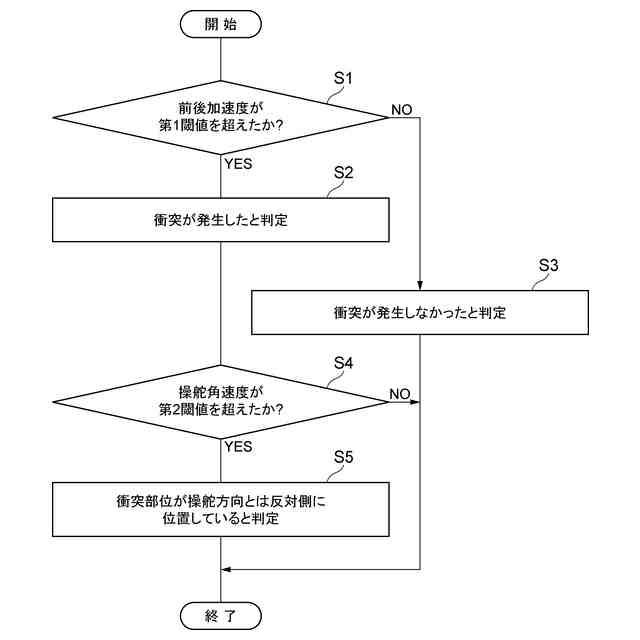
前記衝突位置判定部は、前記車両の前後加速度が第1閾値を超え且つ前記車両の前後加速度が前記第1閾値に達したタイミングよりも前に前記車両の操舵角速度が第2閾値を超えた場合、前記衝突部位が前記車両のうち前記車両の操舵方向とは反対側に位置していると判定する、衝突判定装置。
続きを表示(約 120 文字)
【請求項2】
前記車両には、一つのみの前記加速度センサが設けられている、請求項1に記載の衝突判定装置。
【請求項3】
前記衝突部位の位置に関する情報をサーバへ送信する通信部、を更に備える、請求項1又は2に記載の衝突判定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、衝突判定装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
車両の衝突を判定する衝突判定装置に関する技術文献として、特開2014-137733号公報が知られている。特開2014-137733号公報に記載された衝突判定装置では、加速度センサ及びヨーレートセンサの検出結果に基づいて、車両のうち衝突対象物が衝突した衝突部位の位置を判定している。
【先行技術文献】
【特許文献】
【0003】
特開2014-137733号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したような技術では、衝突が比較的弱かった場合には、車両のヨーレートの検出精度が低下する結果、車両の衝突部位の位置の判定精度が低下するおそれがある。
【0005】
本開示は、車両の衝突部位の位置を高精度に判定することができる衝突判定装置の提供を目的とする。
【課題を解決するための手段】
【0006】
本開示の衝突判定装置は、車両の前方に位置する衝突対象物への車両の衝突を判定する衝突判定装置であって、車両の加速度センサの検出結果に基づいて、車両の前後加速度を取得する加速度取得部と、車両の操舵センサの検出結果に基づいて、車両の操舵角速度を取得する操舵角速度取得部と、車両の前後加速度及び車両の操舵角速度に基づいて、車両のうち衝突対象物と衝突した衝突部位の位置を判定する衝突位置判定部と、を備え、衝突位置判定部は、車両の前後加速度が第1閾値を超え且つ車両の前後加速度が第1閾値に達したタイミングよりも前に車両の操舵角速度が第2閾値を超えた場合、衝突部位が車両のうち車両の操舵方向とは反対側に位置していると判定する。
【発明の効果】
【0007】
本開示によれば、車両の衝突部位の位置を高精度に判定することができる衝突判定装置の提供が可能となる。
【図面の簡単な説明】
【0008】
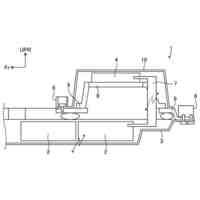
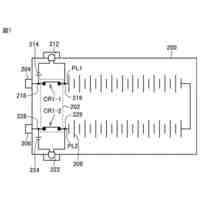
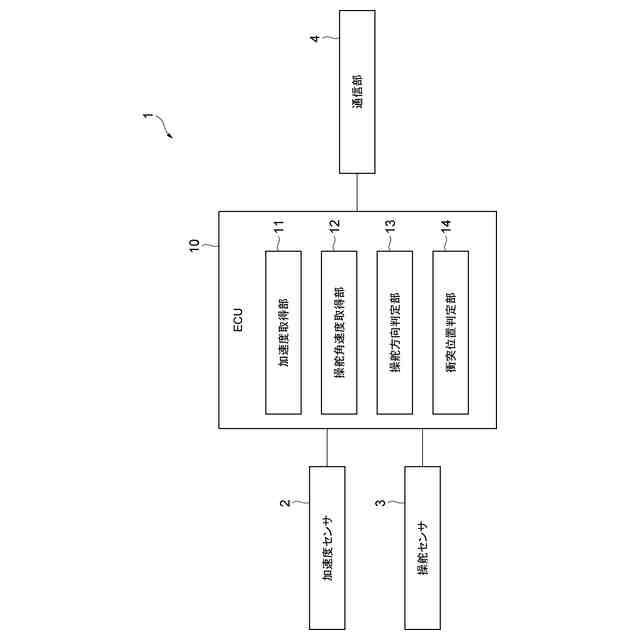
一実施形態に係る衝突判定装置の機能構成のブロック図である。
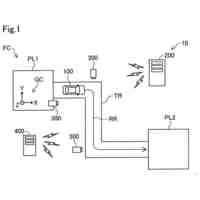
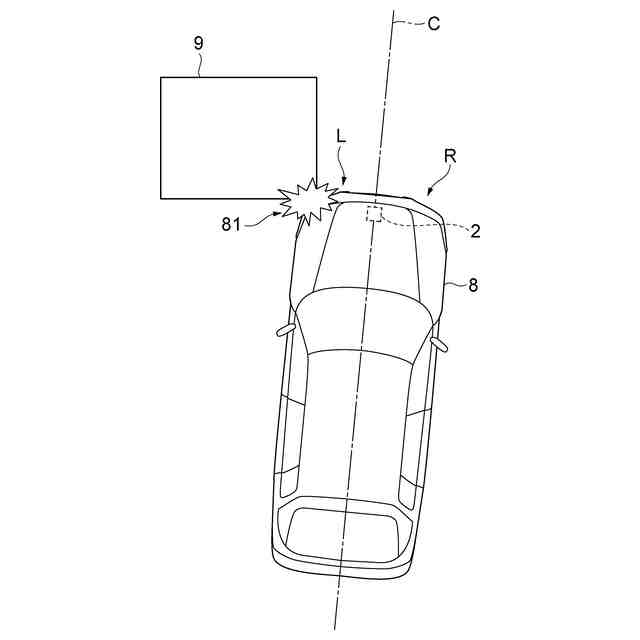
車両及び衝突対象物の平面図である。
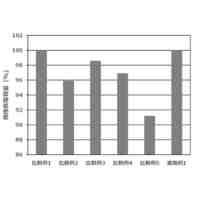
車両の前後加速度及び車両の操舵角速度のそれぞれの経時変化の一例を示すグラフである。
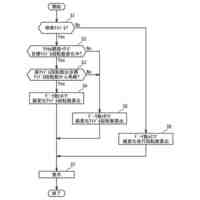
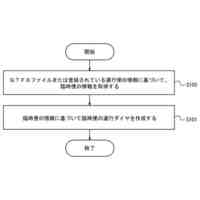
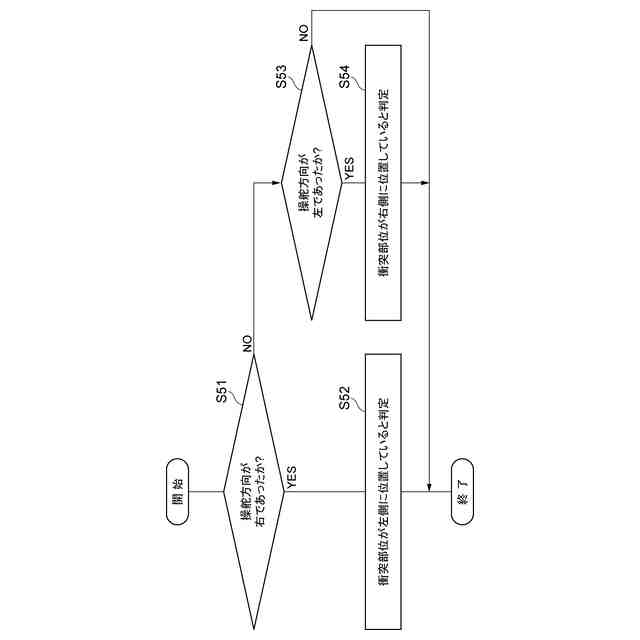
図1に示されるECUによる処理を示すフローチャートである。
図1に示されるECUによる処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態について図面を参照して詳細に説明する。
【0010】
図1は、一実施形態に係る衝突判定装置の機能構成のブロック図である。図1に示される衝突判定装置1は、例えば自動運転車両又は運転支援車両等に搭載されている。図2は、車両及び衝突対象物の平面図である。図2に示されるように、車両8は、車両8の前方に位置する衝突対象物9と衝突する場合がある。衝突判定装置1は、車両8の前方に位置する衝突対象物9への車両8の衝突を判定する。図1に示されるように、衝突判定装置1は、加速度センサ2と、操舵センサ3と、通信部4と、ECU[Electronic Control Unit]10と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
負極層
15日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
送電装置
4日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
水系電池
9日前
トヨタ自動車株式会社
路側装置
8日前
トヨタ自動車株式会社
通信装置
4日前
トヨタ自動車株式会社
更新装置
8日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
路側装置
8日前
トヨタ自動車株式会社
車両構造
5日前
トヨタ自動車株式会社
液系電池
5日前
トヨタ自動車株式会社
ステータ
5日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
内燃機関
11日前
トヨタ自動車株式会社
積層電池
11日前
トヨタ自動車株式会社
蓄電装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ