TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129861
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026793
出願日
2024-02-26
発明の名称
制御装置、制御システム及び制御方法
出願人
横河電機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05B
13/02 20060101AFI20250829BHJP(制御;調整)
要約
【課題】AI処理を導入しながら、制御対象機器の安定した操業を実現できる制御装置等を提供する。
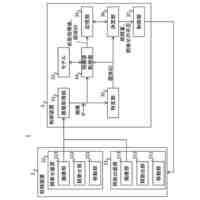
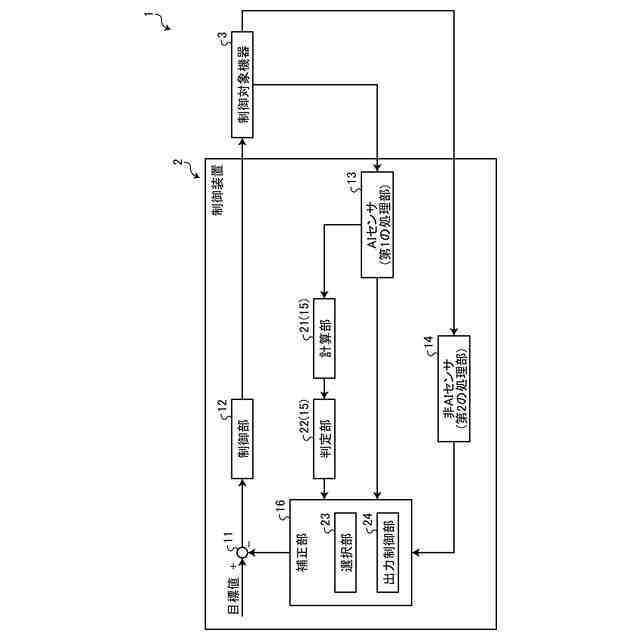
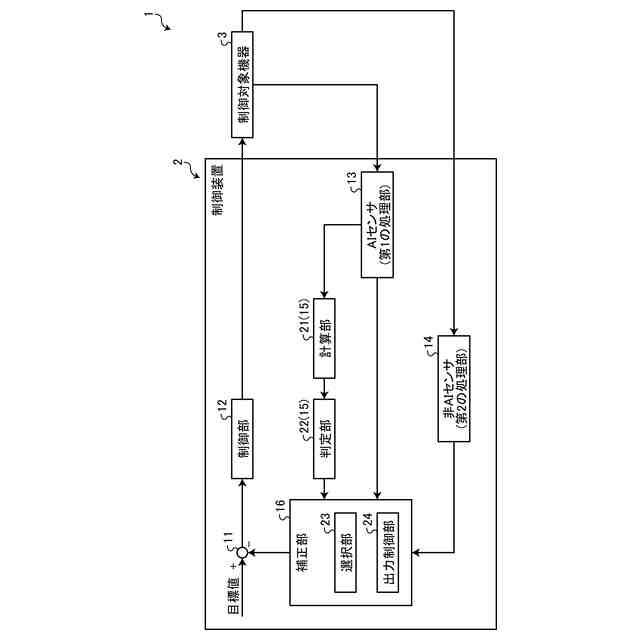
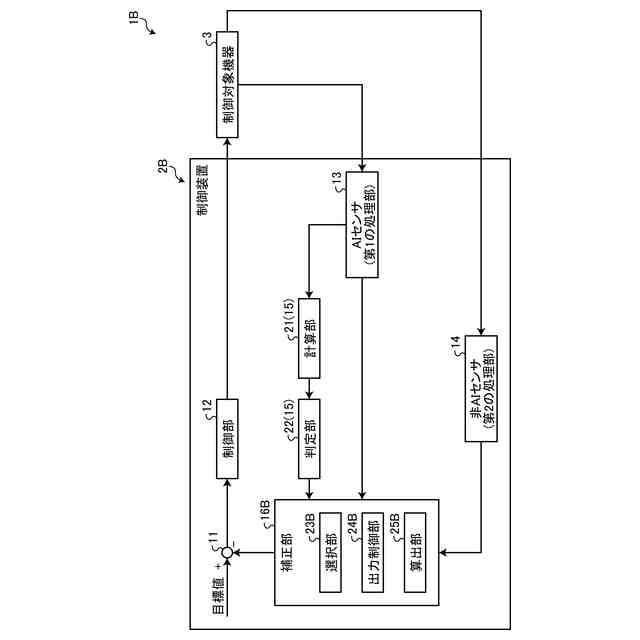
【解決手段】制御装置は、制御対象機器をフィードバック制御する。制御装置は、AI処理を用いて、制御対象機器のフィードバック制御に関わる第1の出力値を取得する第1の処理部と、非AI処理を用いて、フィードバック制御に関わる第2の出力値を取得する第2の処理部と、を有する。制御装置は、第1の出力値の信頼度に基づき、第1の出力値及び第2の出力値の選択割合を補正する補正部と、選択割合に基づき、制御対象機器をフィードバック制御する制御信号を出力する制御部と、を有する。
【選択図】図1A
特許請求の範囲
【請求項1】
制御対象機器をフィードバック制御する制御装置であって、
AI(Artificial Intelligence)処理を用いて、前記制御対象機器のフィードバック制御に関わる第1の出力値を取得する第1の処理部と、
非AI処理を用いて、前記フィードバック制御に関わる第2の出力値を取得する第2の処理部と、
前記第1の出力値の信頼度に基づき、前記第1の出力値及び前記第2の出力値の選択割合を補正する補正部と、
前記選択割合に基づき、前記制御対象機器をフィードバック制御する制御信号を出力する制御部と、
を有することを特徴とする制御装置。
続きを表示(約 2,200 文字)
【請求項2】
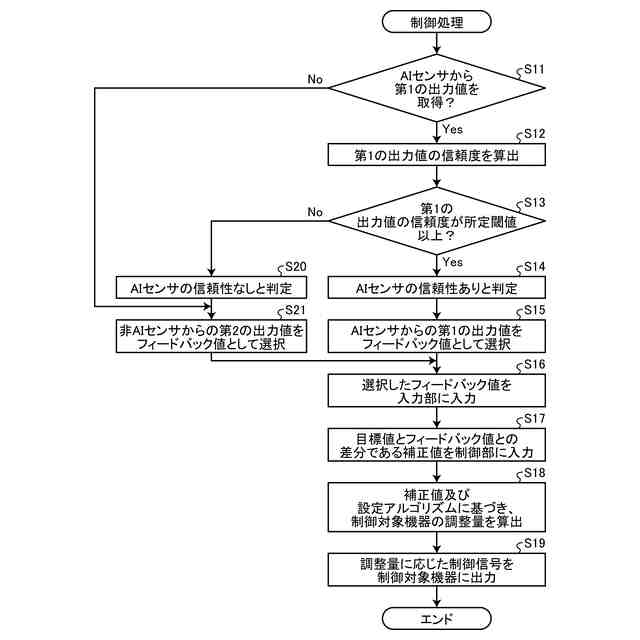
前記第1の出力値の信頼性を数値化して前記第1の出力値の信頼度を算出する計算部と、
前記第1の出力値の信頼度に基づき、前記第1の処理部の信頼性があるか否かを判定する判定部と、を有し、
前記補正部は、
前記第1の処理部の信頼性があるか否かの判定結果に基づき、前記選択割合を補正することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記判定部は、
前記第1の出力値の信頼度が所定閾値以上であるか否かを判定し、前記第1の出力値の信頼度が所定閾値以上の場合に前記第1の処理部の信頼性があると判定し、前記第1の出力値の信頼度が所定閾値未満の場合に前記第1の処理部の信頼性がないと判定し、
前記補正部は、
前記第1の処理部の信頼性があると判定された場合に、前記選択割合として前記第1の出力値のみを選択すると共に、前記第1の処理部の信頼性がないと判定された場合に、前記選択割合として前記第2の出力値のみを選択する選択部
を有することを特徴とする請求項2に記載の制御装置。
【請求項4】
前記判定部は、
前記第1の出力値の信頼度の時系列変化量が所定変化量以上であるか否かを判定し、前記第1の出力値の信頼度の時系列変化量が所定変化量未満の場合に前記第1の処理部の信頼性があると判定し、前記第1の出力値の信頼度の時系列変化量が所定変化量以上の場合に前記第1の処理部の信頼性がないと判定し、
前記補正部は、
前記第1の処理部の信頼性があると判定された場合に、前記選択割合として前記第1の出力値のみを選択すると共に、前記第1の処理部の信頼性がないと判定された場合に、前記選択割合として前記第2の出力値のみを選択する選択部
を有することを特徴とする請求項2に記載の制御装置。
【請求項5】
前記第1の処理部は、
前記AI処理を用いて前記制御対象機器の出力を前記第1の出力値として取得する第1のセンサを有し、
前記第2の処理部は、
前記非AI処理を用いて前記制御対象機器の出力を前記第2の出力値として取得する第2のセンサを有することを特徴とする請求項1~4の何れか一つに記載の制御装置。
【請求項6】
前記第1の処理部は、
前記AI処理を用いて前記制御対象機器の出力を前記第1の出力値として取得する第1のセンサを有し、
前記第2の処理部は、
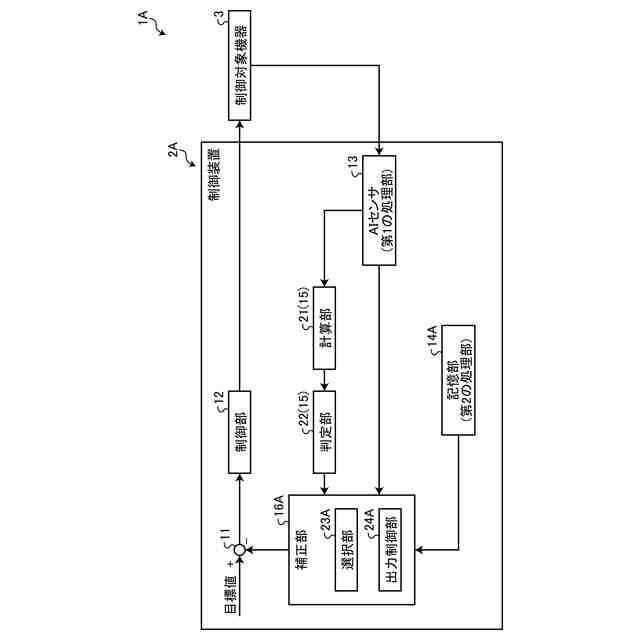
事前に設定された前記制御対象機器の出力を前記第2の出力値として記憶した記憶部を有することを特徴とする請求項1~4の何れか一つに記載の制御装置。
【請求項7】
前記第1の処理部は、
前記AI処理を用いて前記制御対象機器をフィードバック制御する第1の制御信号を前記第1の出力値として取得する第1の制御部を有し、
前記第2の処理部は、
前記非AI処理を用いて前記制御対象機器をフィードバック制御する第2の制御信号を前記第2の出力値として取得する第2の制御部を有することを特徴とする請求項1~4の何れか一つに記載の制御装置。
【請求項8】
前記制御部は、
前記第1の処理部及び前記第2の処理部を有し、
前記第1の処理部は、
前記AI処理を用いて前記制御対象機器をフィードバック制御する第1の制御信号を前記第1の出力値として取得する第1の制御部を有し、
前記第2の処理部は、
前記非AI処理を用いて前記制御対象機器をフィードバック制御する第2の制御信号を前記第2の出力値として取得する第2の制御部を有し、
前記制御部は、
前記第1の出力値及び前記第2の出力値の前記選択割合に基づき、前記第1の制御信号及び前記第2の制御信号を前記制御信号として出力することを特徴とする請求項1~4の何れか一つに記載の制御装置。
【請求項9】
制御対象機器と、前記制御対象機器をフィードバック制御する制御装置とを有する制御システムであって、
前記制御装置は、
AI(Artificial Intelligence)処理を用いて、前記制御対象機器のフィードバック制御に関わる第1の出力値を取得する第1の処理部と、
非AI処理を用いて、前記フィードバック制御に関わる第2の出力値を取得する第2の処理部と、
前記第1の出力値の信頼度に基づき、前記第1の出力値及び前記第2の出力値の選択割合を補正する補正部と、
前記選択割合に基づき、前記制御対象機器をフィードバック制御する制御信号を出力する制御部と、
を有することを特徴とする制御システム。
【請求項10】
制御対象機器をフィードバック制御する制御装置が、
AI(Artificial Intelligence)処理を用いて、前記制御対象機器のフィードバック制御に関わる第1の出力値を取得し、
非AI処理を用いて、前記フィードバック制御に関わる第2の出力値を取得し、
前記第1の出力値の信頼度に基づき、前記第1の出力値及び前記第2の出力値の選択割合を補正し、
前記選択割合に基づき、前記制御対象機器をフィードバック制御する制御信号を出力する
処理を実行することを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御システム及び制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
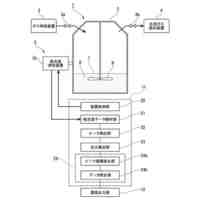
例えば、プラント最適化支援装置では、制御量目標値と制御量計測値との差分に応じて制御対象機器のプラントプロセスを操作する操作量を調整するフィードバック制御部を有する制御装置に機械学習演算部を内蔵したものが知られている。
【0003】
機械学習演算部は、制御対象機器の蓄積した計測値を用いた学習により機械学習モデルを生成し、生成した機械学習モデルを参照して現在時点でプラントプロセスから取得した計測値を入力として制御量を推定する。機械学習演算部は、予め与えられた制御量の目標値である設定目標値と、推定された推定制御量との差分を用いて、制御量目標値を決定する。その結果、フィードバック制御部は、制御対象機器をフィードバック制御できる。
【先行技術文献】
【特許文献】
【0004】
特開2018-106561号公報
特開2021-152702号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、機械学習モデルは、データを通じて帰納的に獲得される学習モデルであり、学習していないデータ、例えば、外挿データに対して適切な出力が得られるとは限らないのが実情である。特に、プラントでは、制御対象機器の安定した操業が求められており、機械学習モデルを取り入れることによって多くの場合に効率的な結果が得られるとしても、ごく少数の事例において安定した操業を担保できないことも考えられる。従って、機械学習モデル等のAI(Artificial Intelligence)処理を導入しながら、制御対象機器の安定した操業を実現できる制御装置が求められている。
【0006】
一つの側面では、AI処理を導入しながら、制御対象機器の安定した操業を実現できる制御装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
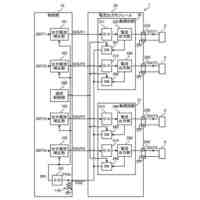
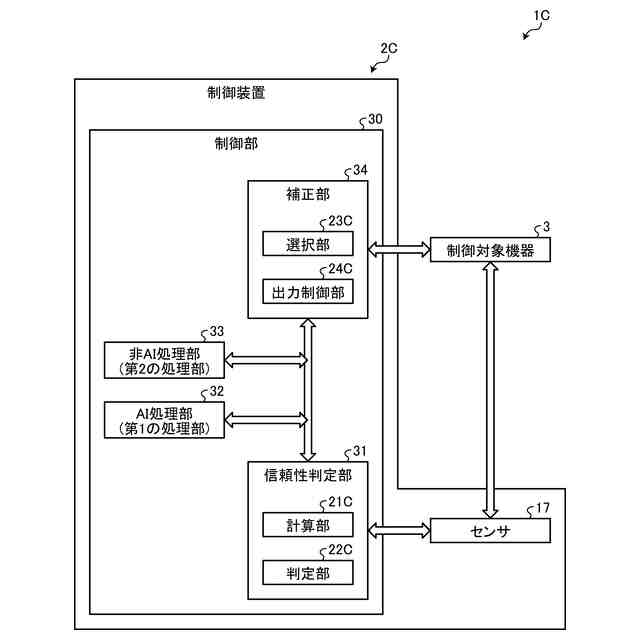
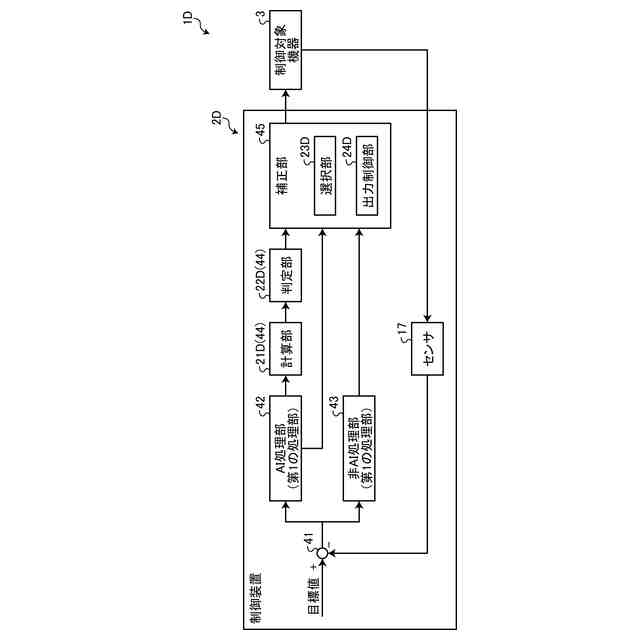
本願が開示する制御装置は、1つの態様において、制御対象機器をフィードバック制御する。制御装置は、AI(Artificial Intelligence)処理を用いて、制御対象機器のフィードバック制御に関わる第1の出力値を取得する第1の処理部と、非AI処理を用いて、フィードバック制御に関わる第2の出力値を取得する第2の処理部と、を有する。更に、制御装置は、第1の出力値の信頼度に基づき、第1の出力値及び第2の出力値の選択割合を補正する補正部と、選択割合に基づき、制御対象機器をフィードバック制御する制御信号を出力する制御部と、を有する。
【発明の効果】
【0008】
一つの態様によれば、AI処理を導入しながら、制御対象機器の安定した操業を実現できる。
【図面の簡単な説明】
【0009】
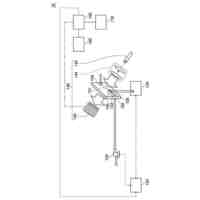
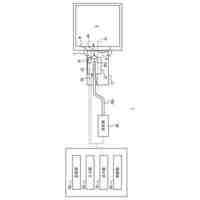
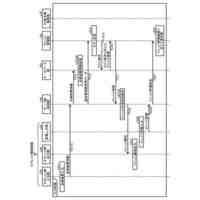
図1Aは、実施例1の制御システムの一例を示す説明図である。
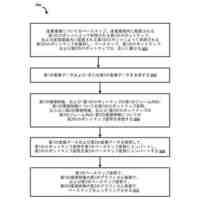
図1Bは、制御装置の制御処理に関わる処理動作の一例を示すフロー図である。
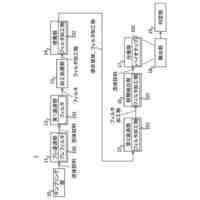
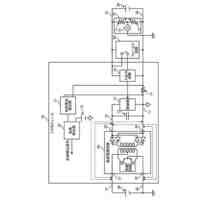
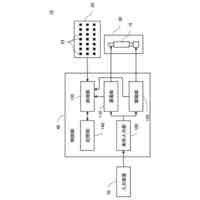
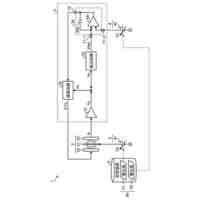
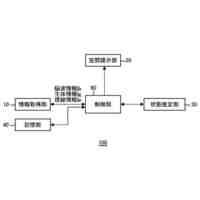
図2は、実施例2の制御システムの一例を示す説明図である。
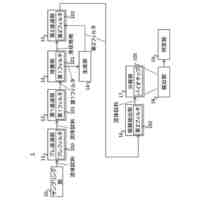
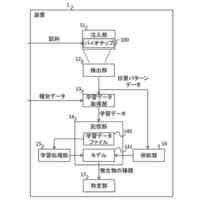
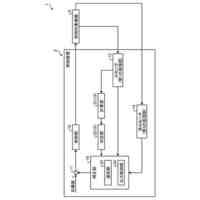
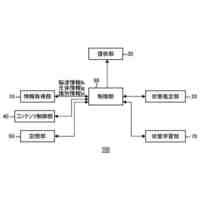
図3は、実施例3の制御システムの一例を示す説明図である。
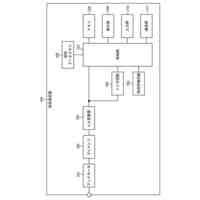
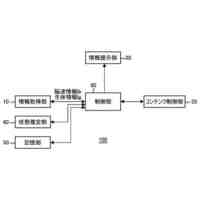
図4は、実施例4の制御システムの一例を示す説明図である。
図5は、実施例5の制御システムの一例を示す説明図である。
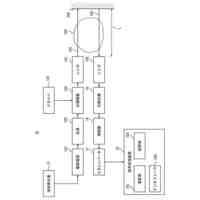
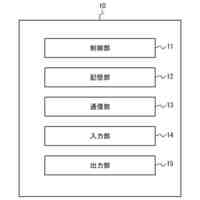
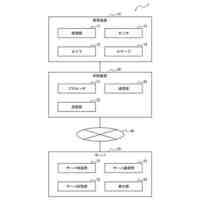
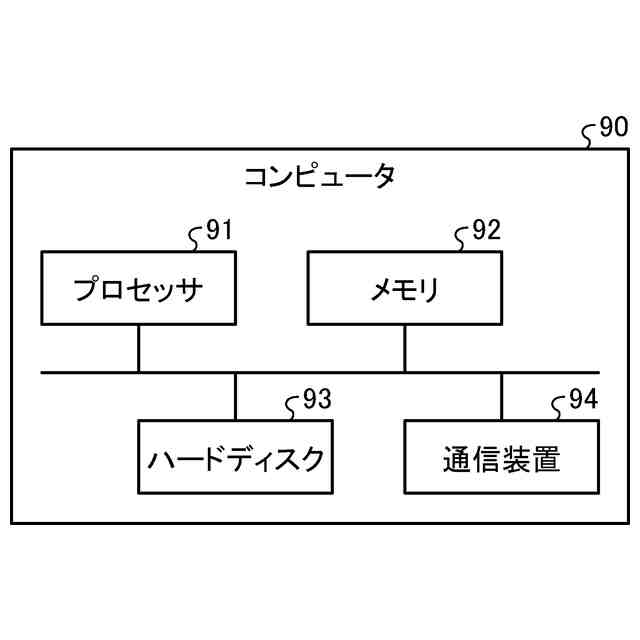
図6は、コンピュータのハードウェア構成の一例を示す説明図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて、本願の開示する制御装置等の実施例を詳細に説明する。尚、本実施例により、開示技術が限定されるものではない。また、以下に示す実施例は、矛盾を起こさない範囲で適宜変形しても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
横河電機株式会社
電流出力装置
3か月前
横河電機株式会社
厚さ測定装置
25日前
横河電機株式会社
装置および方法
1か月前
横河電機株式会社
装置および方法
1か月前
横河電機株式会社
プラント運転支援装置
2か月前
横河電機株式会社
ベースマップの注釈付け
1日前
横河電機株式会社
測定装置および測定方法
8日前
横河電機株式会社
電子機器及び短絡検出方法
1か月前
横河電機株式会社
ガス分析計及びガス分析方法
2か月前
横河電機株式会社
装置、方法およびプログラム
2か月前
横河電機株式会社
測定装置および推定システム
10日前
横河電機株式会社
装置、方法およびプログラム
1か月前
横河電機株式会社
測定装置および回転検出方法
23日前
横河電機株式会社
波形測定器及び波形測定方法
2か月前
横河電機株式会社
複合体、及び熱線吸収フィルム
1か月前
横河電機株式会社
水処理システム及び水処理方法
1日前
横河電機株式会社
分光分析装置及び分光分析方法
2か月前
横河電機株式会社
視点補正を伴う熱イメージング
3か月前
横河電機株式会社
光パルス試験器及びプログラム
3か月前
横河電機株式会社
複合体、及び熱線吸収フィルム
1か月前
横河電機株式会社
ガス測定装置およびガス測定方法
3か月前
横河電機株式会社
センサ装置、調整方法及び調整装置
22日前
横河電機株式会社
システム、方法、およびプログラム
1か月前
横河電機株式会社
制御装置、制御システム及び制御方法
1日前
横河電機株式会社
設定装置、設定方法及び設定プログラム
1か月前
横河電機株式会社
装置、システム、方法およびプログラム
3か月前
横河電機株式会社
分析装置、分析方法および分析プログラム
2か月前
横河電機株式会社
監視方法、監視プログラム、及び監視装置
1か月前
横河電機株式会社
情報処理装置、評価方法及び評価プログラム
2か月前
横河電機株式会社
情報処理装置、生成方法および生成プログラム
15日前
横河電機株式会社
腐食診断装置、腐食診断方法及び腐食診断プログラム
1か月前
横河電機株式会社
情報処理装置、情報処理方法及び情報処理プログラム
3日前
横河電機株式会社
情報処理装置、情報処理方法および情報処理プログラム
2か月前
横河電機株式会社
空間提示装置、空間提示方法および空間提示プログラム
2か月前
横河電機株式会社
状態推定装置、状態推定方法および状態推定プログラム
2か月前
横河電機株式会社
相性推定装置、相性推定方法および相性推定プログラム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ