TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130064
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2025029219
出願日
2025-02-26
発明の名称
ベースマップの注釈付け
出願人
横河電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250829BHJP(計算;計数)
要約
【課題】産業施設のベースマップと、産業施設の周囲をナビゲートするために、ロボットによって利用されるロボット固有マップとの間の変換を行う方法を提供する。
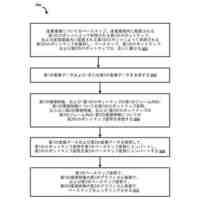
【解決手段】方法は、第1の変換データを、ベースマップと第1のロボットマップを比較することに基づいて生成し、第2の変換データを、ベースマップと第2のロボットマップを比較することに基づいて生成し。第1の変換データおよび第2の変換データを使用して、第1のロボットマップ内で第1のロボットが検出した第1の環境特徴の姿勢を変換し、ベースマップ内に対応する姿勢でグラフィカルにレンダリングし、第2のロボットマップ内の第2の環境特徴の姿勢を変換し、ベースマップ内に対応する姿勢でグラフィカルにレンダリングし、ベースマップ内で観測された産業構成要素について受信した産業データ間の関連付けを、ロボット固有マップ内の環境特徴の検出に関連付ける。
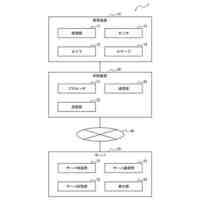
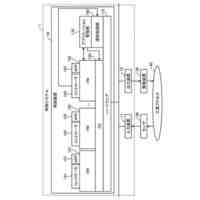
【選択図】図3
特許請求の範囲
【請求項1】
1つまたは複数のプロセッサによって実装される方法であって、
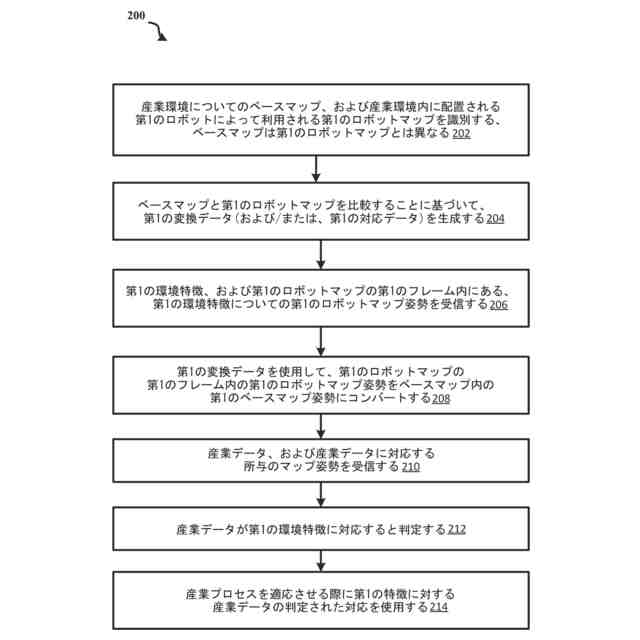
産業環境についてのベースマップ、および前記産業環境内に配置される第1のロボットによって利用される第1のロボットマップを識別するステップであって、
前記ベースマップが前記第1のロボットマップとは異なる、ステップと、
前記ベースマップと前記第1のロボットマップを比較することに基づいて、第1の変換データを生成するステップと、
第1の環境特徴、および前記第1のロボットマップの第1のフレーム内にある、前記第1の環境特徴についての第1のロボットマップ姿勢を受信するステップであって、前記第1の特徴および前記第1のロボットマップ姿勢が、前記第1のフレーム内にあり、前記第1のロボットによって検出されている、第1のセンサーデータを処理することに基づいて判定される、ステップと、
前記第1の変換データを使用して、前記第1のロボットマップ姿勢を第1のベースマップ姿勢にコンバートするステップと、
産業データ、および前記産業データに対応する所与のマップ姿勢を受信するステップと、
前記産業データが前記第1の環境特徴に対応すると判定するステップであって、
前記産業データが前記第1の環境特徴の検出に時間的に対応すると判定すること、および
前記第1の環境特徴についての前記第1のベースマップ姿勢が前記産業データについての前記所与のマップ姿勢に位置的に対応すると判定すること
に基づいて、前記産業データが前記第1の環境特徴に対応すると判定するステップと、
産業プロセスを適応させる際に前記第1の特徴に対する前記産業データの前記判定された対応を使用するステップと
を含む、方法。
続きを表示(約 1,600 文字)
【請求項2】
前記第1の環境特徴が、前記産業環境内の固定された構成要素に近づく可動対象物に対応する、請求項1に記載の方法。
【請求項3】
前記産業データが、前記産業環境内の前記固定された構成要素に対する異常センサー示度を含む、請求項2に記載の方法。
【請求項4】
前記産業プロセスを適応させる際に前記第1の特徴に対する前記産業データの前記判定された対応を使用するステップが、
前記第1の環境特徴のタイプに基づいて、前記固定された構成要素を伴う前記産業プロセスに対するアクションを実施するステップ
を含む、請求項1に記載の方法。
【請求項5】
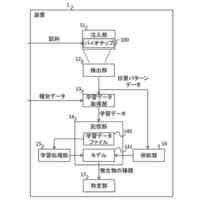
前記第1の特徴および前記第1のロボットマップ姿勢が、機械学習モデルを使用して前記第1のセンサーデータを処理することに基づいて判定される、請求項1に記載の方法。
【請求項6】
前記所与のマップ姿勢が前記ベースマップ内にある、請求項1に記載の方法。
【請求項7】
前記産業データが、前記所与のマップ姿勢とともに、1つまたは複数のネットワーク上で送信される、請求項1に記載の方法。
【請求項8】
前記ベースマップが、前記所与のマップ姿勢における構成要素を含み、前記産業データが、前記構成要素に関連付けられる、請求項1に記載の方法。
【請求項9】
前記産業データが、前記構成要素のタイプ、前記構成要素の設置日、および/または前記構成要素に関する現在のもしくは最近の示度を含む、請求項8に記載の方法。
【請求項10】
1つまたは複数のプロセッサによって実装される方法であって、
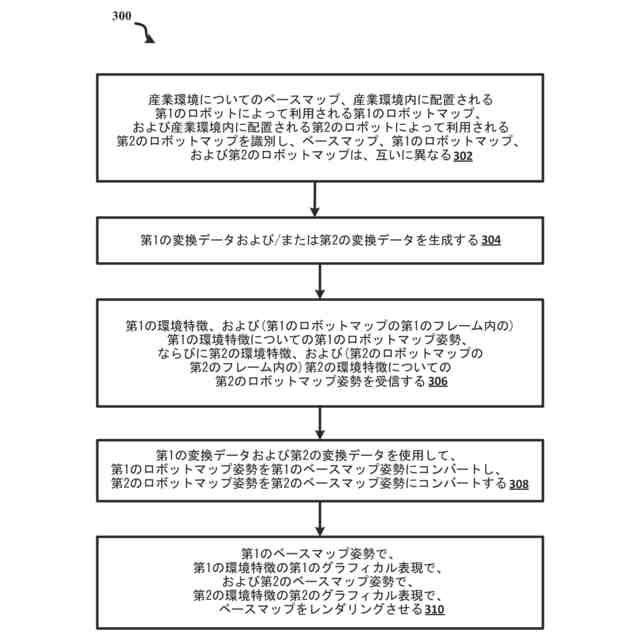
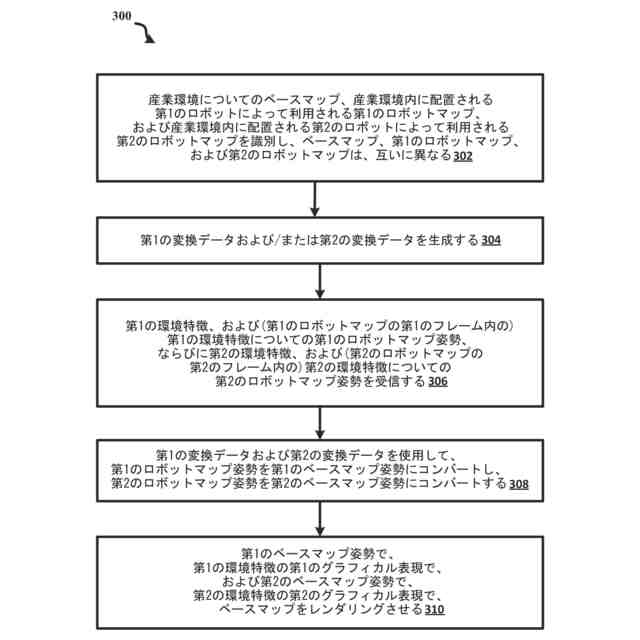
産業環境についてのベースマップ、前記産業環境内に配置される第1のロボットによって利用される第1のロボットマップ、および前記産業環境内に配置される第2のロボットによって利用される第2のロボットマップを識別するステップであって、
前記ベースマップ、前記第1のロボットマップ、および前記第2のロボットマップがすべて、互いに異なる、ステップと、
前記ベースマップを前記第1のロボットマップと比較することに基づいて、第1の変換データを生成するステップと、
前記ベースマップを前記第2のロボットマップと比較することに基づいて、第2の変換データを生成するステップと、
第1の環境特徴、および前記第1のロボットマップの第1のフレーム内にある、前記第1の環境特徴についての第1のロボットマップ姿勢を受信するステップであって、前記第1の環境特徴および前記第1のロボットマップ姿勢が、前記第1のフレーム内にあり、前記第1のロボットによって検出されている、第1のセンサーデータを処理することに基づいて判定される、ステップと、
第2の環境特徴、および前記第2のロボットマップの第2のフレーム内にある、前記第2の環境特徴についての第2のロボットマップ姿勢を受信するステップであって、前記第2の環境特徴および前記第2のロボットマップ姿勢が、前記第2のフレーム内にあり、前記第2のロボットによって検出されている、第2のセンサーデータを処理することに基づいて判定される、ステップと、
前記第1の変換データを使用して、前記第1のロボットマップ姿勢を第1のベースマップ姿勢にコンバートするステップと、
前記第2の変換データを使用して、前記第2のロボットマップ姿勢を第2のベースマップ姿勢にコンバートするステップと、
前記第1のベースマップ姿勢で、前記第1の環境特徴の第1のグラフィカル表現で、および前記第2のベースマップ姿勢で、前記第2の環境特徴の第2のグラフィカル特徴で、前記ベースマップをレンダリングさせるステップと
を含む、方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、概して、ベースマップの注釈付けに関し、より具体的には、産業施設のベースマップと、産業施設の周囲をナビゲートするために、ロボットによって利用されるロボット固有マップとの間の変換に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
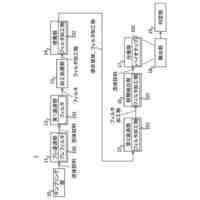
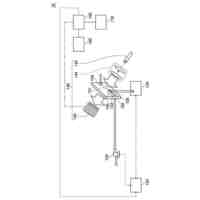
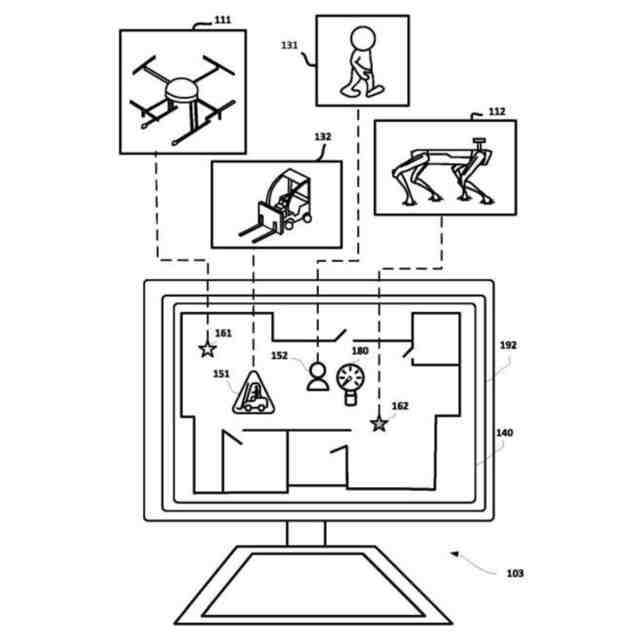
異なる関心地点(POI)にナビゲートする、POIの画像をキャプチャする、ガス示度または他の測定値を測定する、異常を監視する、および/または漏れを修理するなど、異なるミッションを実施するために産業施設の異なるエリアにおいて多数のロボットが利用され配置され得る。たとえば、所与の時点で、第1のロボット(たとえば、視覚センサーを持ち運ぶ車輪駆動ロボット)は、第1のPOI(たとえば、異常を監視するための空き空間)にナビゲートすること、異常検出のために第1のPOIの対応する画像をキャプチャすること、および/または(たとえば、油漏れを)監視することを伴う第1のミッションを実施していることがある。この例を続けると、所与の時点(または、異なる時点)で、第2のロボット(たとえば、ガスセンサーを持ち運ぶドローン)は、第2のPOI(たとえば、大型容器の密閉空間)にナビゲートすること、および第2のPOIのためのガスセンサーのガス示度に基づいて、あるガスの存在を検出することを伴う第2のミッションを実施していることがある。
【0003】
産業施設についての第1のミッションを実施するか、または場合によっては、その周囲をナビゲートする際に、第1のロボットは、第1のロボットに固有である第1のロボットマップを利用する。産業施設についての第2のミッションを実施するか、または場合によっては、その周囲をナビゲートする際、第2のロボットは、第2のロボットに固有である第2のロボットマップを利用する。言い換えれば、産業施設についてのミッション、または場合によっては、ナビゲーションを実施する際、各ロボットは、そのロボットに固有であるマップを利用する。すなわち、マップは、そのロボットによってのみ、またはその環境内に配置されているロボットのサブセットによってのみ、利用され得、他のロボットは、それらの他のロボットに固有であるマップを利用する。
【0004】
たとえば、第1のロボットは、第1の製造会社からの第1のモデルのロボットであってもよく、第1のロボットからの過去の観測に基づいて生成された第1のロボットマップを利用することができ、第2のロボットも第1の製造会社からの第1のモデルであるロボットであってもよいが、第2のロボットからの過去の観測に基づいて生成された第2のロボットマップを利用することができる。両方のロボットは同じ第1の製造会社からの同じ第1のモデルであるが、何の「グローバル」マップも利用せず、代わりに、各々、その独自の固有のマップを生成し利用するため、これらのロボットは、別個のマップを利用することができる。
【0005】
別の例として、第1のロボットは、第1の製造会社からの第1のモデルのロボットであってもよく、第1のロボットからの過去の観測に基づいて生成された第1のロボットマップを利用することができ、第2のロボットは、第2の製造会社からの第2のモデルのロボットであるロボットであってもよく、第2のロボットからの過去の観測に基づいて生成された第2のロボットマップを利用することができる。
【0006】
ロボット固有マップは、様々な様式で生成されてもよく、様々な形態をとってもよい。たとえば、ロボット固有マップは、Lidar示度から生成されてもよく、Lidar示度に基づいて生成されたポイントクラウドとして記憶されてもよい。
【発明の概要】
【発明が解決しようとする課題】
【0007】
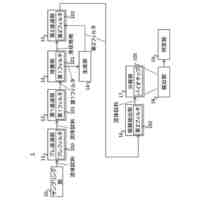
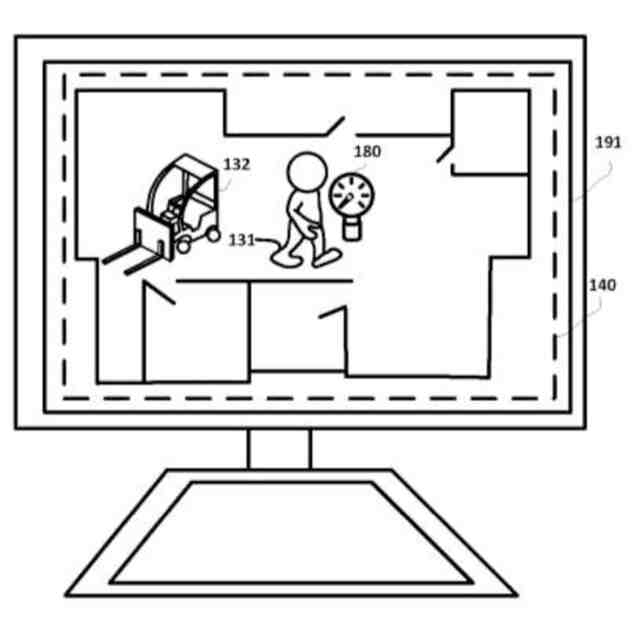
上記で言及したように、複数のロボットがいる産業環境(たとえば、産業施設)において、各ロボットは、そのロボットに固有であるマップを利用する。これは、様々な課題を提示し得る。一例として、第1のロボットからの視覚データは、第1のロボットがいる環境内の第1の対象物(たとえば、フォークリフトまたは人間など、動き回っている動的対象物)を検出するために、および/または第1の対象物の第1の姿勢を検出するために、処理され得る。第1の対象物の第1の姿勢は、第1のロボットによって利用される第1のロボットマップの第1のロボット基準フレーム(「第1のフレーム」)に関係する第1のロボットマップ固有姿勢である。さらに、第2のロボットからの視覚データは、第2のロボットがいる環境内の第2の対象物を検出するために、および/または第2の対象物の第2の姿勢を検出するために、処理され得る。第2の対象物の第2の姿勢は、第2のロボットによって利用される第2のロボットマップの第2のロボット基準フレーム(「第2のフレーム」)に関係する第2のロボットマップ固有姿勢である。第1のロボットがいる環境は、第2のロボットがいる環境と重複してもよく、または重複しなくてもよい。第1のロボットがいる環境および第2のロボットがいる環境は、各々、産業環境の一部分に対応し得る。
【0008】
しかしながら、第1の対象物および第2の対象物の姿勢は異なる基準フレームを有する異なるロボットマップ内で検出されるため、第1の姿勢および第2の姿勢のみを利用して、第1の対象物と第2の対象物の間の相対姿勢を判定することは可能でない。さらに、第1の姿勢のみを利用して、ベースマップ(たとえば、産業環境の3Dモデル)上の第1の対象物についての第1のベースマップ姿勢を判定すること、または第2の姿勢のみを利用して、ベースマップ上の第2の対象物についての第2のベースマップ姿勢を判定することは可能でない。したがって、第1の対象物および第1の姿勢の検出、ならびに第2の対象物および第2の姿勢の検出の有効性は、限定的である。
【0009】
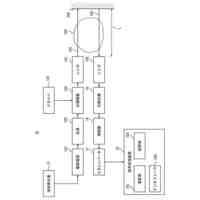
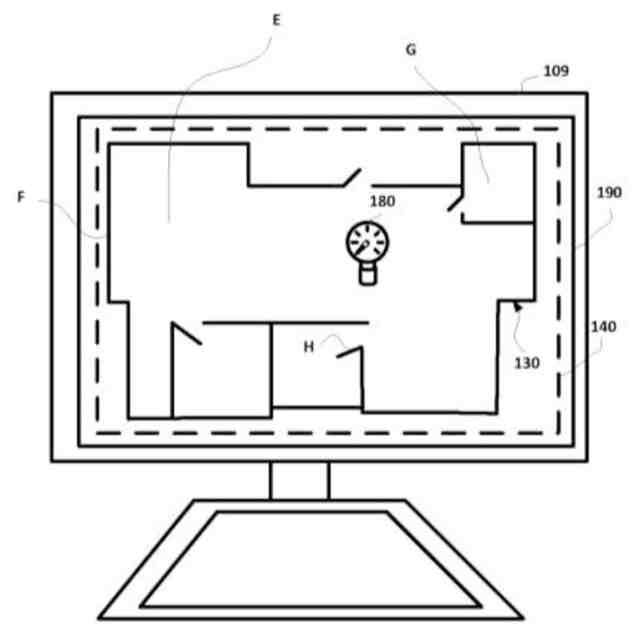
たとえば、第1の対象物および第2の対象物は、互いに相関されること、および/または(たとえば、オペレータが産業施設内の第1の対象物および第2の対象物の位置を観察することを可能にするために)ベースマップの表現上の適切なロケーション内にレンダリングされることが可能でない。別の例として、第1の対象物および第2の対象物は、ベースマップのベースマップ基準フレーム(「ベースフレーム」)に対して定義されている産業自動化データ(たとえば、自動センサー示度など)に相関されることが可能でない。ベースマップは、たとえば、産業施設の様相、産業施設内に配置されるロボット、および/またはそのようなロボットによって検出された対象物または他の特徴を監視および/または制御する際に人間によって利用されるベースマップであってもよい。ベースマップは、たとえば、施設の3Dモデルから、および/または施設内からLidar示度(および/または他の示度)に基づいて生成されたポイントクラウドから(たとえば、マッピングの目的でユーザによって施設の周囲で着用されるLidarを備えたバックパックから)生成され得る。ベースマップは、任意で、構成要素のタイプ、構成要素の設置日、構成要素に関する現在のまたは最近の示度など、産業施設内の様々な産業構成要素についての豊富な情報を含み得る。
【課題を解決するための手段】
【0010】
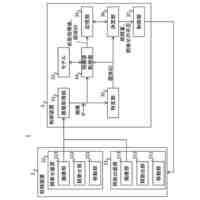
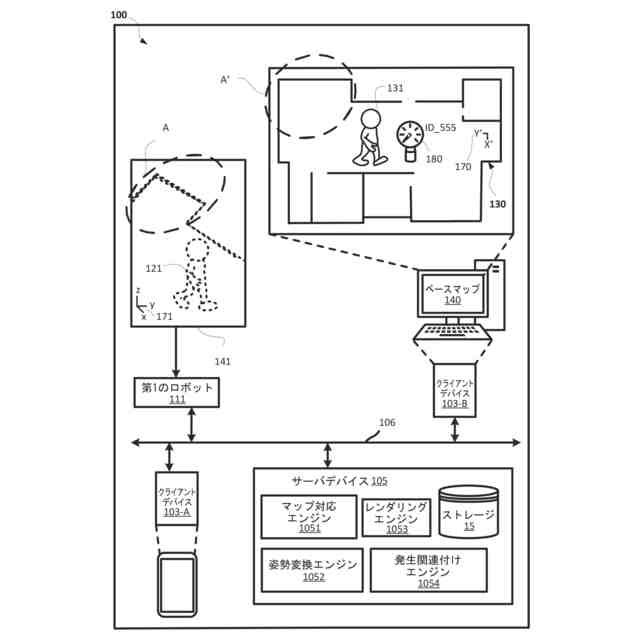
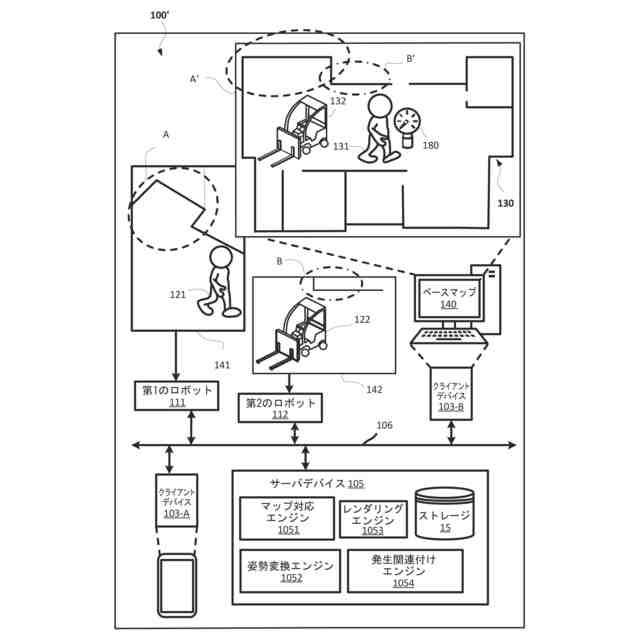
本明細書で開示する実装形態は、複数のロボット固有マップの各々と産業施設のベースマップの間で変換し(translate)、それらの変換を使用して、検出された環境特徴(たとえば、前述の第1の対象物および/または第2の対象物)のロボット固有マップ姿勢を検出された環境特徴のベースマップ姿勢に変換することに関する。複数のロボット固有マップは、各々、産業施設内に配置されるロボット(たとえば、単一のロボット)のサブセットに固有であるか、またはそれによって利用される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
横河電機株式会社
厚さ測定装置
25日前
横河電機株式会社
装置および方法
1か月前
横河電機株式会社
装置および方法
1か月前
横河電機株式会社
プラント運転支援装置
2か月前
横河電機株式会社
ベースマップの注釈付け
1日前
横河電機株式会社
測定装置および測定方法
8日前
横河電機株式会社
電子機器及び短絡検出方法
1か月前
横河電機株式会社
測定装置および回転検出方法
23日前
横河電機株式会社
ガス分析計及びガス分析方法
2か月前
横河電機株式会社
装置、方法およびプログラム
2か月前
横河電機株式会社
装置、方法およびプログラム
1か月前
横河電機株式会社
波形測定器及び波形測定方法
2か月前
横河電機株式会社
測定装置および推定システム
10日前
横河電機株式会社
光パルス試験器及びプログラム
3か月前
横河電機株式会社
視点補正を伴う熱イメージング
3か月前
横河電機株式会社
水処理システム及び水処理方法
1日前
横河電機株式会社
分光分析装置及び分光分析方法
2か月前
横河電機株式会社
複合体、及び熱線吸収フィルム
1か月前
横河電機株式会社
複合体、及び熱線吸収フィルム
1か月前
横河電機株式会社
ガス測定装置およびガス測定方法
3か月前
横河電機株式会社
センサ装置、調整方法及び調整装置
22日前
横河電機株式会社
システム、方法、およびプログラム
1か月前
横河電機株式会社
制御装置、制御システム及び制御方法
1日前
横河電機株式会社
装置、システム、方法およびプログラム
3か月前
横河電機株式会社
設定装置、設定方法及び設定プログラム
1か月前
横河電機株式会社
監視方法、監視プログラム、及び監視装置
1か月前
横河電機株式会社
分析装置、分析方法および分析プログラム
2か月前
横河電機株式会社
情報処理装置、評価方法及び評価プログラム
2か月前
横河電機株式会社
情報処理装置、生成方法および生成プログラム
15日前
横河電機株式会社
腐食診断装置、腐食診断方法及び腐食診断プログラム
1か月前
横河電機株式会社
情報処理装置、情報処理方法及び情報処理プログラム
3日前
横河電機株式会社
情報処理装置、情報処理方法および情報処理プログラム
2か月前
横河電機株式会社
相性推定装置、相性推定方法および相性推定プログラム
2か月前
横河電機株式会社
状態推定装置、状態推定方法および状態推定プログラム
2か月前
横河電機株式会社
空間提示装置、空間提示方法および空間提示プログラム
2か月前
横河電機株式会社
制御装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ