TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130456
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027631
出願日
2024-02-27
発明の名称
電子牽引走行システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
1/09 20060101AFI20250901BHJP(信号)
要約
【課題】走行安全性の向上を図ることができる電子牽引走行システムを提供すること。
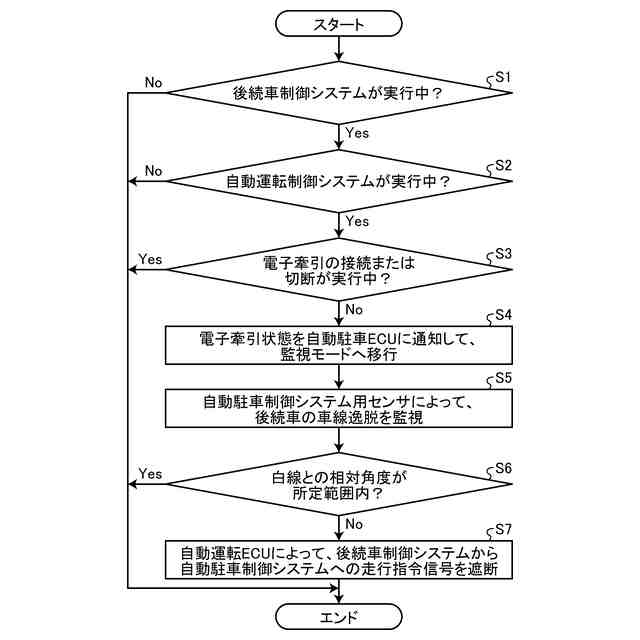
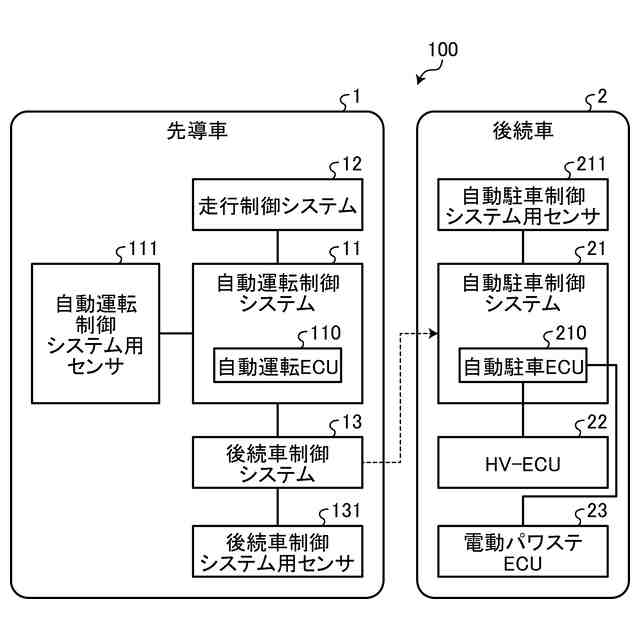
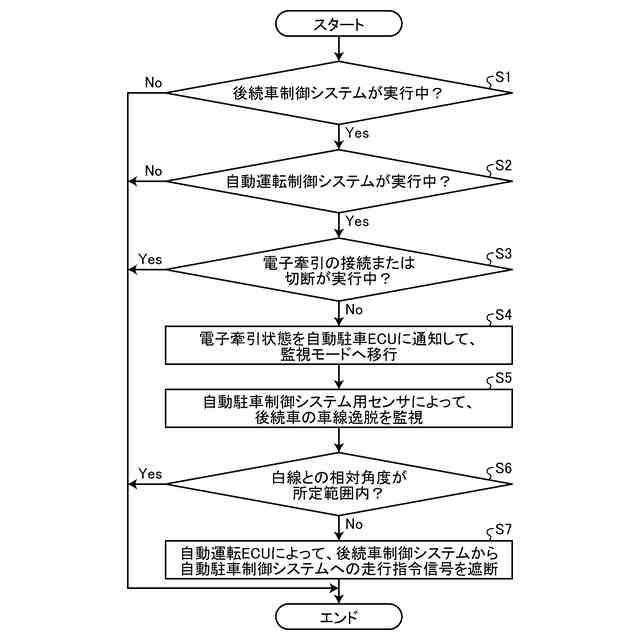
【解決手段】本発明の電子牽引走行システムは、先導車が車車間通信を用いて後続車を電子牽引する電子牽引走行システムであって、先導車は、自動運転制御システムと、自動運転制御システムからの制御値に基づいて後続車を制御する後続車制御システムとを備えており、後続車は、後続車制御システムからの走行制御信号を受信可能な自動駐車制御システムと、自動駐車制御システム用センサとを備えており、後続車は、自動駐車制御システムが自動駐車制御システム用センサによって後続車の車線逸脱の判断を実行しながら走行する。
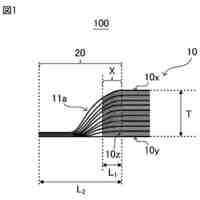
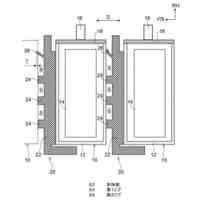
【選択図】図2
特許請求の範囲
【請求項1】
先導車が車車間通信を用いて後続車を電子牽引する電子牽引走行システムであって、
前記先導車は、自動運転制御システムと、前記自動運転制御システムからの制御値に基づいて前記後続車を制御する後続車制御システムとを備えており、
前記後続車は、前記後続車制御システムからの走行制御信号を受信可能な自動駐車制御システムと、自動駐車制御システム用センサとを備えており、
前記後続車は、前記自動駐車制御システムが前記自動駐車制御システム用センサによって前記後続車の車線逸脱の判断を実行しながら走行する、
ことを特徴とする電子牽引走行システム。
続きを表示(約 380 文字)
【請求項2】
先導車が車車間通信を用いて後続車を電子牽引する電子牽引走行システムであって、
前記先導車は、自動運転制御システムと、前記自動運転制御システムからの制御値に基づいて前記後続車を制御する後続車制御システムとを備えており、
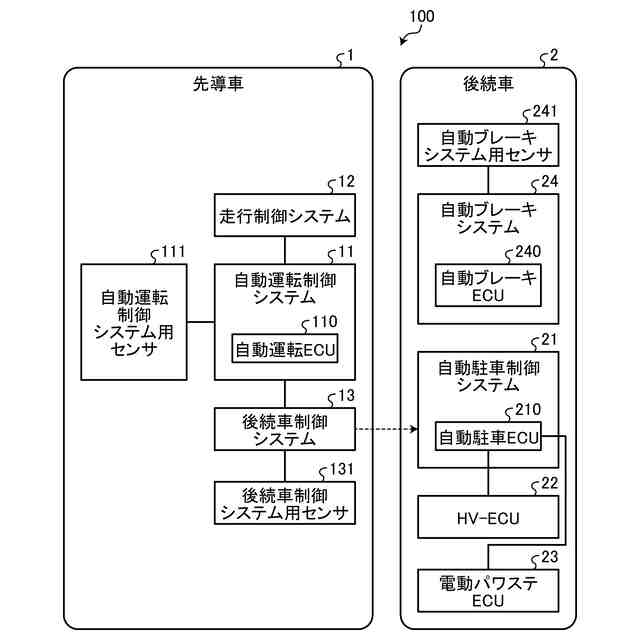
前記後続車は、前記後続車制御システムからの走行制御信号を受信可能な自動駐車制御システムと、自動ブレーキシステムと、自動ブレーキシステム用センサとを備えており、
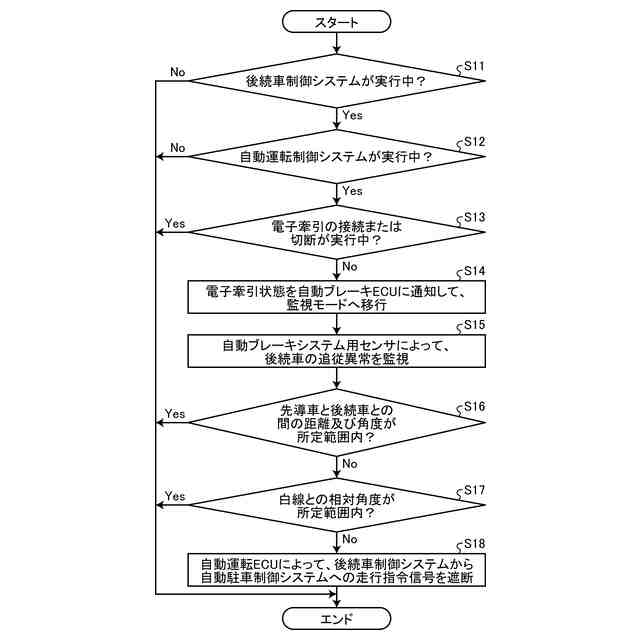
前記後続車は、前記自動ブレーキシステムが、前記自動ブレーキシステム用センサによって前記後続車の車線逸脱の判断を実行するとともに、前記先導車と前記後続車との間の相対距離を監視しながら走行し、
前記相対距離が所定値よりも小さい場合には、前記自動ブレーキシステムによってブレーキ制御を実行する、
ことを特徴とする電子牽引走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子牽引走行システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、先導車が車車間通信を用いて後続車を電子牽引し、先導車と後続車との間で通信を介して計画された経路に基づいて走行する電子牽引走行システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-144609号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された電子牽引走行システムでは、後続車が適切に先導車に追従できているか否かを監視する機能が十分ではないため、走行安全性に改善の余地がある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、走行安全性の向上を図ることができる電子牽引走行システムを提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る電子牽引走行システムは、先導車が車車間通信を用いて後続車を電子牽引する電子牽引走行システムであって、前記先導車は、自動運転制御システムと、前記自動運転制御システムからの制御値に基づいて前記後続車を制御する後続車制御システムとを備えており、前記後続車は、前記後続車制御システムからの走行制御信号を受信可能な自動駐車制御システムと、自動駐車制御システム用センサとを備えており、前記後続車は、前記自動駐車制御システムが前記自動駐車制御システム用センサによって前記後続車の車線逸脱の判断を実行しながら走行する、ことを特徴とするものである。
【0007】
これにより、後続車が車線逸脱の判断を実行しながら走行することにより、適切に先導車に追従できるため、走行安全性の向上を図ることができる。
【0008】
また、本発明に係る電子牽引走行システムは、先導車が車車間通信を用いて後続車を電子牽引する電子牽引走行システムであって、前記先導車は、自動運転制御システムと、前記自動運転制御システムからの制御値に基づいて前記後続車を制御する後続車制御システムとを備えており、前記後続車は、前記後続車制御システムからの走行制御信号を受信可能な自動駐車制御システムと、自動ブレーキシステムと、自動ブレーキシステム用センサとを備えており、前記後続車は、前記自動ブレーキシステムが、前記自動ブレーキシステム用センサによって前記後続車の車線逸脱の判断を実行するとともに、前記先導車と前記後続車との間の相対距離を監視しながら走行し、前記相対距離が所定値よりも小さい場合には、前記自動ブレーキシステムによってブレーキ制御を実行する、ことを特徴とするものである。
【0009】
これにより、後続車が車線逸脱の判断に加えて、先導車と後続車との間の相対距離を維持するように走行することによって、適切に先導車に追従できるため、走行安全性の向上を図ることができる。
【発明の効果】
【0010】
本発明に係る電子牽引走行システムは、後続車が適切に先導車に追従できるため、走行安全性の向上を図ることができるという効果を奏する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
装置
今日
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
装置
今日
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
方法
11日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
負極層
18日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
スペーサ
15日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
積層電池
14日前
トヨタ自動車株式会社
送電装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
電動車両
19日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
内燃機関
14日前
トヨタ自動車株式会社
駆動装置
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ