TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133132
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024030881
出願日
2024-03-01
発明の名称
手術支援システムおよび手術支援システムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250904BHJP(医学または獣医学;衛生学)
要約
【課題】手術器具の可動範囲を超えようとする操作が行われた場合でも、操作部による操作を受け付ける状態を維持したまま、手術器具の姿勢の急激な変化を抑制することが可能な手術支援システムを提供する。
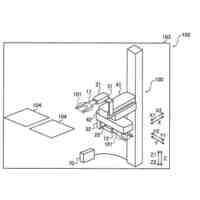
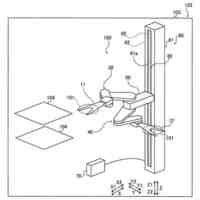
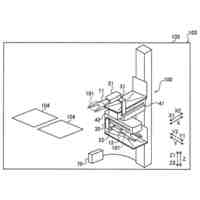
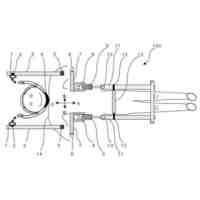
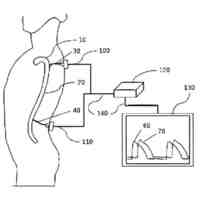
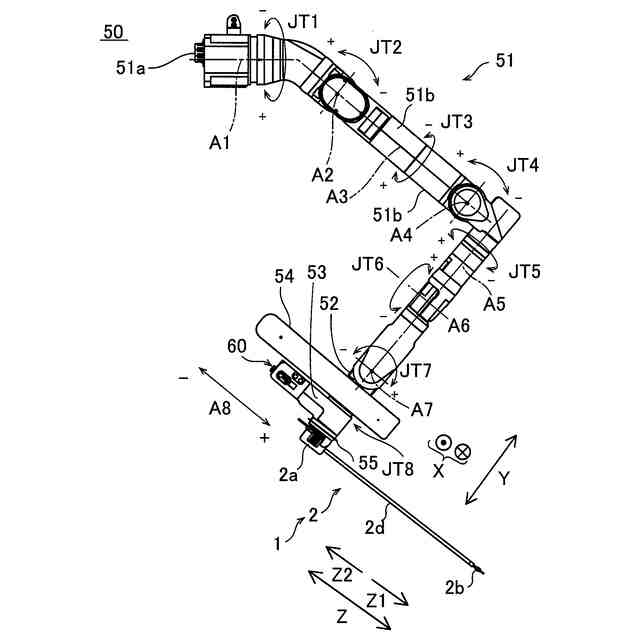
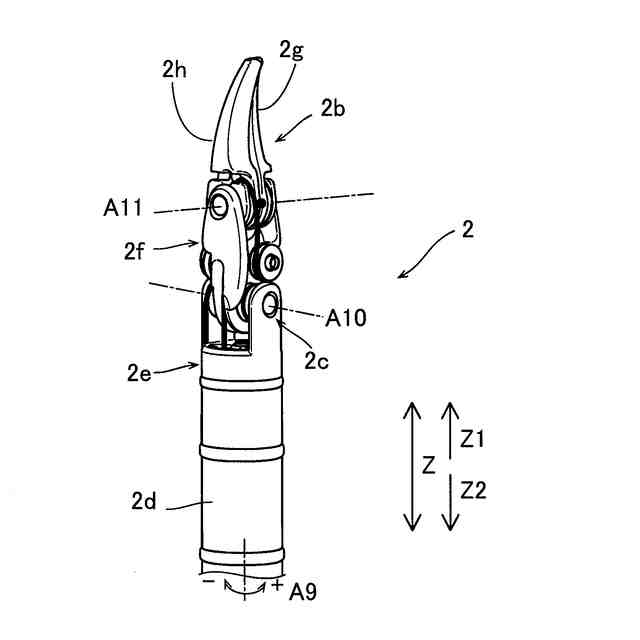
【解決手段】手術支援システム500では、シャフト2dおよびシャフト2dの先端に手首関節2cを介して接続されるエンドエフェクタ2bを含むインストゥルメント2が取り付けられるロボットアーム50と、インストゥルメント2に対する操作を受け付ける操作部110を備える遠隔操作装置200と、操作部110により受け付けられるインストゥルメント2に対する操作が、シャフト2dの回転動作範囲外にシャフト2dを回転させる操作を含む場合、操作部110による、シャフト2dの回転動作範囲外方向への回転の操作、および、シャフト2dに対するエンドエフェクタ2bの屈曲の操作を制限する第1制御装置310と、を備える。
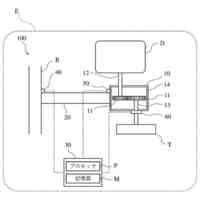
【選択図】図19
特許請求の範囲
【請求項1】
シャフトおよび前記シャフトの先端に手首関節を介して接続される先端器具を含む手術器具が取り付けられるロボットアームと、
前記手術器具に対する操作を受け付ける操作部を備える操作装置と、
前記操作部により受け付けられる前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記操作部による、前記シャフトの回転動作範囲外方向への回転の操作、および、前記シャフトに対する前記先端器具の屈曲の操作を制限する制御装置と、を備える、手術支援システム。
続きを表示(約 2,000 文字)
【請求項2】
前記シャフトの回転動作範囲は、前記シャフトの機械的な回転動作範囲よりも小さいソフトウェア上で規定された回転動作範囲である、請求項1に記載の手術支援システム。
【請求項3】
前記手術器具は、前記シャフトに取り付けられる第1支持部材と、前記第1支持部材に第1回転軸周りに回転可能に支持され、前記先端器具を前記第1回転軸と交差する第2回転軸周りに回転可能に支持する第2支持部材と、を備え、
前記シャフトに対する前記先端器具の屈曲の操作は、前記第2支持部材を前記第1回転軸周りに回転させる操作と、前記先端器具を前記第2回転軸周りに回転させる操作と、を含む、請求項1に記載の手術支援システム。
【請求項4】
前記操作部は、操作者の指で操作されるグリップ部材の一端を回転可能に支持するとともに、その長手方向と平行な第3回転軸の周りに回転し、前記シャフトを回転する操作を受け付けるグリップ支持部材を含み、
前記シャフトを回転させる操作は、前記グリップ支持部材を前記第3回転軸の周りに回転させることにより受け付けられる、請求項1に記載の手術支援システム。
【請求項5】
前記操作部は、前記グリップ部材を前記第3回転軸の周りに回転させるグリップ支持部材用モータを含み、
前記制御装置は、前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記グリップ支持部材の回転を留まらせるように前記グリップ支持部材用モータを制御する、請求項4に記載の手術支援システム。
【請求項6】
前記操作部は、アーム部とリスト部とを含み、
前記リスト部は、
基端部が前記アーム部の先端部に接続され、第4回転軸の周りに回転する第1リンク部と、
基端部が前記第1リンク部の先端部に接続され、第5回転軸の周りに回転する第2リンク部と、
基端部が前記第2リンク部の先端部に接続されるとともに先端部に前記グリップ支持部材が接続され、第6回転軸の周りに回転する第3リンク部と、を含み、
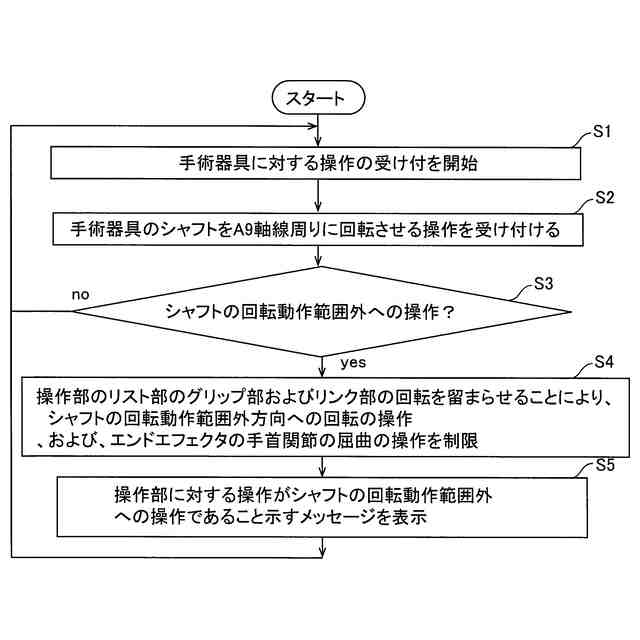
前記制御装置は、前記操作部により受け付けられる前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記第1リンク部の前記第4回転軸周りの回転、前記第2リンク部の前記第5回転軸周りの回転および前記第3リンク部の前記第6回転軸周りの回転を制限する、請求項4に記載の手術支援システム。
【請求項7】
前記リスト部は、
前記第1リンク部を前記第4回転軸の周りに回転させる第1リンク用モータと、
前記第2リンク部を前記第5回転軸の周りに回転させる第2リンク用モータと、
前記第3リンク部を前記第6回転軸の周りに回転させる第3リンク用モータと、を含み、
前記制御装置は、前記操作部により受け付けられる前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記第1リンク部、前記第2リンク部および前記第3リンク部の回転を留まらせるように、前記第1リンク用モータ、前記第2リンク用モータおよび前記第3リンク用モータを制御する、請求項6に記載の手術支援システム。
【請求項8】
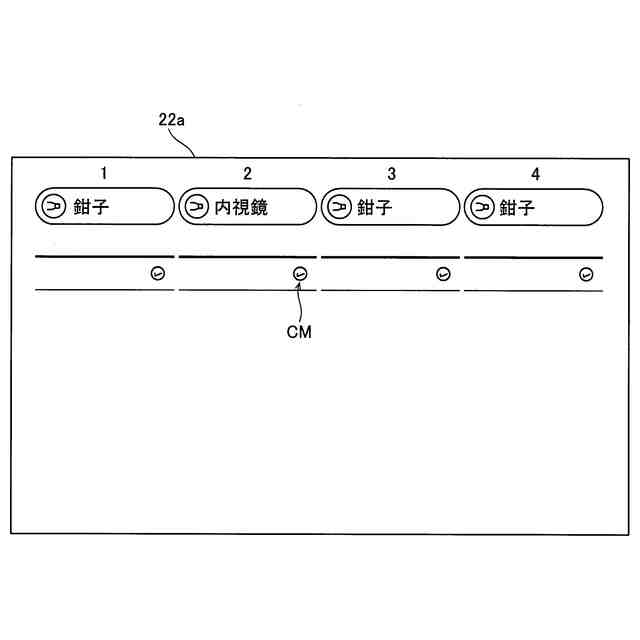
前記操作部により受け付けられる前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記操作部に対する操作が前記シャフトの回転動作範囲外への操作であることを示すメッセージを表示する第1表示部を備える、請求項1に記載の手術支援システム。
【請求項9】
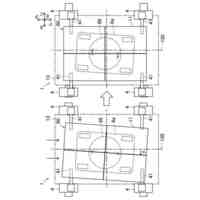
前記ロボットアームの可動範囲と、前記ロボットアームの可動範囲に対する前記操作部の可動範囲と、前記ロボットアームの現在位置と、を表す標識が表示される第2表示部を備える、請求項1に記載の手術支援システム。
【請求項10】
シャフトおよび前記シャフトの先端に手首関節を介して接続される先端器具を含む手術器具が取り付けられるロボットアームと、前記手術器具に対する操作を受け付ける操作部を備える操作装置と、を含む手術支援システムの制御方法であって、
前記操作部により、前記手術器具に対する操作を受け付けることと、
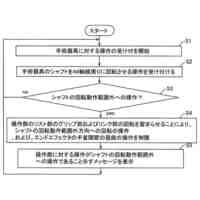
前記操作部により受け付けられる前記手術器具に対する操作が、前記シャフトの回転動作範囲外に前記シャフトを回転させる操作を含む場合、前記操作部による、前記シャフトの回転動作範囲外方向への回転の操作、および、前記シャフトに対する前記先端器具の屈曲の操作を制限することと、を備える、手術支援システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システムおよび手術支援システムの制御方法に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
従来、ロボットアームの先端に取り付けられる手術器具と、手術器具に対する操作を受け付ける操作部と、を備える手術支援システムが知られている。特許文献1には、処置具が取り付けられるスレーブマニピュレータアームと、操作ハンドルを有する操作入力装置と、制御部と、を備えるマスタスレーブマニピュレータが開示されている。特許文献1では、操作ハンドルによって処置具が遠隔操作されている。特許文献1では、処置具は、たとえば鉗子である。また、特許文献1では、制御部は、操作ハンドルからの鉗子を開閉するための指令値と、鉗子の実際の開閉角とのずれを監視している。そして、制御部は、鉗子を開閉するための指令値と、鉗子の実際の開閉角とのずれが許容値を超えた場合、操作ハンドルによる処置具の操作が受け付けられる連動モードから、操作ハンドルによる処置具の操作を受け付けない連動停止モードに移行する。また、特許文献1では、制御部は、連動停止モードにおいて、操作ハンドルによって処置具を一旦最大の開閉角まで開く操作がされたことを検知した後、再び操作ハンドルによって処置具が閉じられ、鉗子を開閉するための指令値と、鉗子の実際の開閉角とのずれが許容値内に収まったことに基づき、再び連動モードに移行する。
【先行技術文献】
【特許文献】
【0003】
特許第6000641号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、制御部は、操作ハンドルからの鉗子を開閉するための指令値と、鉗子の実際の開閉角とのずれに基づいて、連動停止モードと連動モードとを切り替えている一方、操作ハンドルにより処置具の可動範囲を超えようとする操作が行われた場合については言及されていない。ここで、仮に操作ハンドルが処置具の可動範囲を超えた場合にすべて連動停止モードにすると、手術がその都度中断し、効率的な手術の実施ができない。一方、操作ハンドルが処置具の可動範囲を超えた場合も連動モードを維持すると、処置具の姿勢は変化しない一方、操作ハンドルの姿勢は変化する。この場合において、再び、操作ハンドルにより受け付けられた操作が、処置具の可動範囲内の操作に戻った際に、操作ハンドルの姿勢に追従するように処置具の姿勢が急激に変化する。上記より、操作ハンドルにより処置具の可動範囲を超える操作が行われた場合でも、連動モードを維持したまま、処置具の姿勢の急激な変化を抑制する事が望まれている。
【0005】
この開示は、手術器具の可動範囲を超えようとする操作が行われた場合でも、操作部による操作を受け付ける状態を維持したまま、手術器具の姿勢の急激な変化を抑制することが可能な手術支援システムおよび手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示の第1の局面による手術支援システムは、シャフトおよびシャフトの先端に手首関節を介して接続される先端器具を含む手術器具が取り付けられるロボットアームと、手術器具に対する操作を受け付ける操作部を備える操作装置と、操作部により受け付けられる手術器具に対する操作が、シャフトの回転動作範囲外にシャフトを回転させる操作を含む場合、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作を制限する制御装置と、を備える。
【0007】
本開示の第1の局面による手術支援システムでは、制御装置は、操作部により受け付けられる手術器具に対する操作が、シャフトの回転動作範囲外にシャフトを回転させる操作を含む場合、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作を制限する。これにより、シャフトの回転動作範囲外にシャフトを回転させる操作が行われた場合でも、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作が制限されるため、操作部の姿勢が保持される。そのため、先端器具およびシャフトの姿勢と操作部の姿勢とが合わなくなることが抑制されるので、先端器具およびシャフトの姿勢と操作部の姿勢とが合致した状態が維持される。また、制御装置は、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作を制限するだけで、操作部による操作の全ての受け付けを制限するわけではない。そのため、手術器具の可動範囲を超えようとする操作が行われた場合でも、操作部による操作を受け付ける状態を維持したまま、手術器具の姿勢の急激な変化を抑制できる。
【0008】
本開示の第2の局面による手術支援システムの制御方法は、シャフトおよびシャフトの先端に手首関節を介して接続される先端器具を含む手術器具が取り付けられるロボットアームと、手術器具に対する操作を受け付ける操作部を備える操作装置と、を含む手術支援システムの制御方法であって、操作部により、手術器具に対する操作を受け付けることと、操作部により受け付けられる手術器具に対する操作が、シャフトの回転動作範囲外にシャフトを回転させる操作を含む場合、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作を制限することと、を備える。
【0009】
本開示の第2の局面による手術支援システムの制御方法は、上記のように、操作部により受け付けられる手術器具に対する操作が、シャフトの回転動作範囲外にシャフトを回転させる操作を含む場合、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作を制限すること、を備える。これにより、シャフトの回転動作範囲外にシャフトを回転させる操作が行われた場合でも、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作が制限されるため、操作部の姿勢が保持される。そのため、先端器具およびシャフトの姿勢と操作部の姿勢とが合わなくなることが抑制されるので、先端器具およびシャフトの姿勢と操作部の姿勢とが合致した状態が維持される。また、操作部による、シャフトの回転動作範囲外方向への回転の操作、および、シャフトに対する先端器具の屈曲の操作が制限されるだけで、操作部による操作の受け付けが全て制限されるわけではない。そのため、手術器具の可動範囲を超えようとする操作が行われた場合でも、操作部による操作を受け付ける状態を維持したまま、手術器具の姿勢の急激な変化を抑制することが可能な手術支援システムの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、手術器具の可動範囲を超えようとする操作が行われた場合でも、操作部による操作を受け付ける状態を維持したまま、手術器具の姿勢の急激な変化を抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
位置情報システム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
クローズドインペラ
3日前
川崎重工業株式会社
正極活物質の再生方法
4日前
川崎重工業株式会社
ロボットシステム及びロボット
3日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
2日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
個人
健康器具
6か月前
個人
歯茎みが品
7か月前
個人
短下肢装具
1か月前
個人
鼾防止用具
6か月前
個人
洗井間専家。
5か月前
個人
脈波測定方法
6か月前
個人
脈波測定方法
7か月前
個人
導電香
7か月前
個人
白内障治療法
6か月前
個人
前腕誘導装置
1か月前
個人
嚥下鍛錬装置
2か月前
個人
マッサージ機
7か月前
個人
歯の修復用材料
2か月前
個人
片足歩行支援具
7か月前
個人
ホバーアイロン
5か月前
個人
胸骨圧迫補助具
7日前
個人
アイマスク装置
16日前
個人
矯正椅子
3か月前
個人
クリップ
7か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ