TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133134
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024030883
出願日
2024-03-01
発明の名称
手術支援システムおよび手術支援システムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250904BHJP(医学または獣医学;衛生学)
要約
【課題】操作部の操作性を向上させることが可能な手術支援システムを提供する。
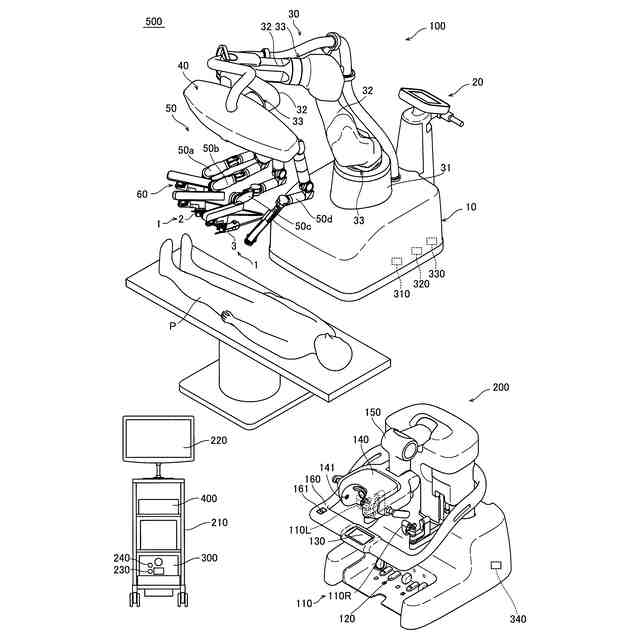
【解決手段】手術支援システム500は、手術器具1が取り付けられるロボットアーム50を含む手術支援ロボット100と、手術器具1に対する操作を受け付け、座標系C1が、手術支援ロボット100の内視鏡座標系C13に対して所定の角度θ回転されている操作部110を含む遠隔操作装置200と、操作部110によって受け付けられた操作に基づいて、ロボットアーム50により手術器具1を移動させる制御を実行する第1制御装置310と、操作者による所定の角度θの変更を受け付けるタッチパネル130と、を備える。
【選択図】図23
特許請求の範囲
【請求項1】
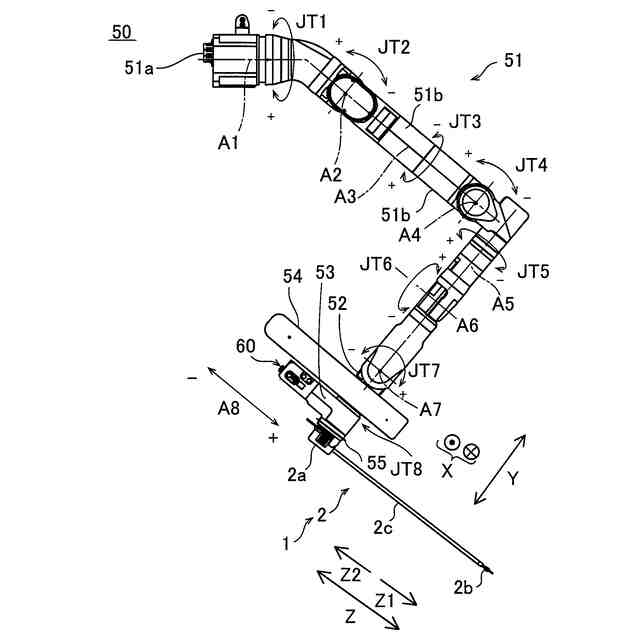
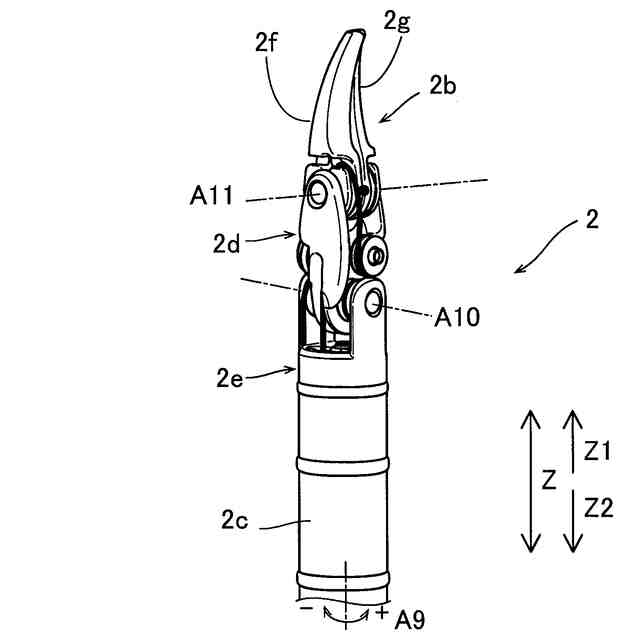
手術器具が取り付けられるロボットアームを含む手術装置と、
前記手術器具に対する操作を受け付け、座標系が、前記手術装置の座標系に対して所定の角度回転されている操作部を含む操作装置と、
前記操作部によって受け付けられた操作に基づいて、前記ロボットアームにより前記手術器具を移動させる制御を実行する制御装置と、
操作者による前記所定の角度の変更を受け付ける受付部と、を備える、手術支援システム。
続きを表示(約 1,300 文字)
【請求項2】
前記所定の角度は、前記操作装置が配置される面に垂直な線よりも、前記操作者から離間する向きに回転された角度である、請求項1に記載の手術支援システム。
【請求項3】
前記受付部は、前記操作装置に配置され、前記手術支援システムに対する設定を受け付けるタッチパネルを含む、請求項1に記載の手術支援システム。
【請求項4】
前記受付部は、一定の角度刻みで、前記所定の角度の変更を受け付ける、請求項1に記載の手術支援システム。
【請求項5】
前記手術器具は、内視鏡を含み、
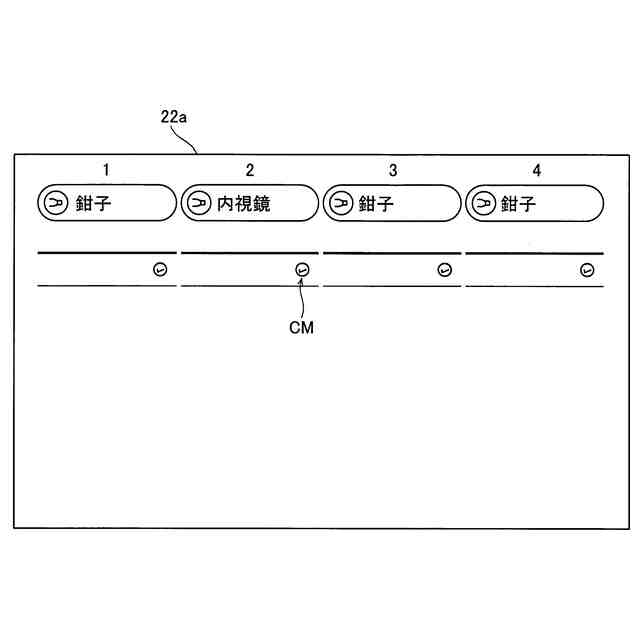
前記内視鏡によって撮像された画像が、前記手術装置の座標系に合わせて表示される表示部を備える、請求項1に記載の手術支援システム。
【請求項6】
前記操作者ごとに受け付けられた前記所定の角度を記憶する記憶部を備え、
前記制御装置は、
前記記憶部に記憶された前記操作者ごとに受け付けられた前記所定の角度を読み出し、
読み出した前記所定の角度に基づいて前記操作部の座標系を設定する、請求項1に記載の手術支援システム。
【請求項7】
前記手術器具は、内視鏡を含み、
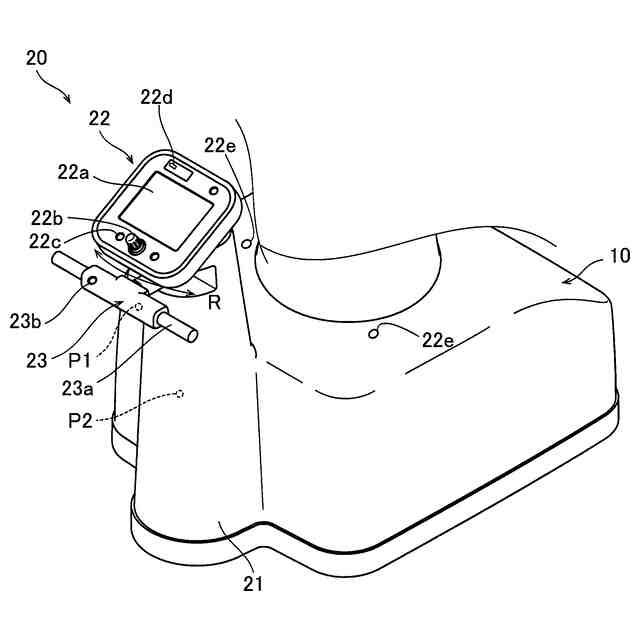
前記操作装置は、前記内視鏡によって取り込まれた画像が表示され、前記操作者の頭が没入されるモニタを含み、
前記モニタは、前記操作装置を操作する前記操作者の左右方向に沿った軸周りに回転角が調整され、
前記受付部は、前記所定の角度の変更を、前記モニタの回転角の調整とは独立して受け付ける、請求項1に記載の手術支援システム。
【請求項8】
前記手術器具は、内視鏡を含み、
前記操作装置は、前記内視鏡によって取り込まれた画像が表示され、前記操作者の頭が没入されるモニタを含み、
前記モニタは、前記操作装置を操作する前記操作者の左右方向に沿った軸周りに回転角が調整され、
前記所定の角度は、前記モニタの回転に連動して変更され、
前記受付部は、前記モニタの回転に連動して変更された前記所定の角度のさらなる変更を受け付ける、請求項1に記載の手術支援システム。
【請求項9】
前記ロボットアームおよび前記手術器具に対する前記制御装置の指令値と、前記ロボットアームおよび前記手術器具の実際の軸値と、を監視する監視制御装置を備え、
前記監視制御装置は、前記制御装置の指令値と前記軸値との差が所定の閾値を超えた場合、警告を報知する制御を実行する、請求項1に記載の手術支援システム。
【請求項10】
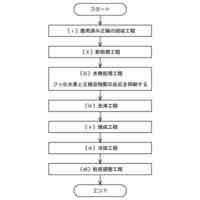
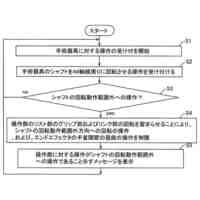
手術装置の座標系に対して所定の角度回転されている操作部の座標系の、操作者による前記所定の角度の変更の操作を受け付けることと、
受け付けた前記所定の角度の変更の操作に基づいて、前記操作部の座標系の前記所定の角度回転を変更することと、
前記操作部の座標系が変更された状態で、ロボットアームに取り付けられた手術器具に対する前記操作部による操作を受け付けることと、
受け付けた操作に基づいて、前記ロボットアームにより前記手術器具を移動させることと、を備える、手術支援システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システムおよび手術支援システムの制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、手術器具が取り付けられるロボットアームを備える手術支援システムが知られている。特許文献1には、ロボットアームと、ロボットアームを操作するマスターコントロールコンソールと、を備えるロボット手術システムが開示されている。マスターコントロールコンソールには、操作者の手によって操作されるマスターコントローラと、操作者の頭が没入されるビューワと、が配置されている。ビューワは、水平面に対する角度が調整可能である。特許文献1では、調整されたビューワの角度に応じて、マスターコントローラの座標系が自動的に調整されている。たとえば、ビューワは、操作者が見下ろすような角度に調整され、見下ろすような角度に調整されたビューワの角度に応じて、マスターコントローラの座標系が調整されている。
【先行技術文献】
【特許文献】
【0003】
米国特許第6424885号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、ビューワの角度に応じてマスターコントローラの座標系が自動的に調整されてしまうため、操作者によっては、マスターコントローラの操作性が悪くなる場合があると考えられる。そこで、マスターコントローラの操作性を向上することが望まれている。
【0005】
この開示は、操作部の操作性を向上させることが可能な手術支援システムおよび手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示の第1の局面による手術支援システムは、手術器具が取り付けられるロボットアームを含む手術装置と、手術器具に対する操作を受け付け、座標系が、手術装置の座標系に対して所定の角度回転されている操作部を含む操作装置と、操作部によって受け付けられた操作に基づいて、ロボットアームにより手術器具を移動させる制御を実行する制御装置と、操作者による所定の角度の変更を受け付ける受付部と、を備える。
【0007】
本開示の第1の局面による手術支援システムは、受付部は、操作者による所定の角度の変更を受け付ける。これにより、手術装置の座標系に対する操作部の座標系の回転角度を変更することができるので、操作者が操作部を操作しやすいように、操作部の座標系を調整することができる。その結果、操作部の操作性を向上させることができる。
【0008】
本開示の第2の局面による手術支援システムの制御方法は、手術装置の座標系に対して所定の角度回転されている操作部の座標系の、操作者による所定の角度の変更を受け付けることと、受け付けた所定の角度に基づいて、操作部の座標系を変更することと、操作部の座標系が変更された状態で、ロボットアームに取り付けられた手術器具に対する操作部による操作を受け付けることと、受け付けた操作に基づいて、ロボットアームにより手術器具を移動させることと、を備える。
【0009】
本開示の第2の局面による手術支援システムの制御方法は、上記のように、操作者による所定の角度の変更を受け付けることと、受け付けた所定の角度に基づいて、操作部の座標系を変更することと、を備える。これにより、手術装置の座標系に対する操作部の座標系の回転角度を変更することができるので、操作者が操作部を操作しやすいように、操作部の座標系を調整することができる。その結果、操作部の操作性を向上させることが可能な手術支援システムの制御方法を提供できる。
【発明の効果】
【0010】
本開示の手術支援システムおよび手術支援システムの制御方法によれば、操作部の操作性を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
10日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
14日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
位置情報システム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
クローズドインペラ
2日前
川崎重工業株式会社
液化ガス導入システム
10日前
川崎重工業株式会社
正極活物質の再生方法
3日前
川崎重工業株式会社
電池セル及びその分解方法
24日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
2日前
川崎重工業株式会社
電力供給システムおよびその制御方法
9日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
9日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
2日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
1日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
6日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
多重殻タンク
20日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
15日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
14日前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
22日前
個人
健康器具
6か月前
個人
短下肢装具
1か月前
個人
鼾防止用具
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ