TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132796
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030589
出願日
2024-02-29
発明の名称
歯車装置の支持構造の診断装置及び診断方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G01M
99/00 20110101AFI20250903BHJP(測定;試験)
要約
【課題】歯車装置の支持構造の診断装置等を提供する。
【解決手段】歯車装置の支持構造の診断装置は、歯車装置を支持する支持構造の振動を検出する第1センサと、前記第1センサの検出結果を処理する処理回路とを備え、前記処理回路は、同じ噛み合い周波数での第1振動データ及び第2振動データとの差異を算出することと、前記差異に基づき、前記支持構造の状態診断を行うこととを実行し、前記第1振動データは、前記支持構造が正常状態である第1期間の噛み合い周波数での前記支持構造の振動を示すデータであり、前記第2振動データは、前記第1期間よりも後の第2期間における前記第1センサの検出結果から処理された、噛み合い周波数での前記支持構造の振動を示すデータであり、噛み合い周波数は、前記歯車装置に含まれる歯車の複数の歯が係合対象と噛み合う周波数である。
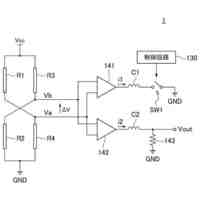
【選択図】図1
特許請求の範囲
【請求項1】
歯車装置の支持構造の診断装置であって、
歯車装置を支持する支持構造の振動を検出する第1センサと、
前記第1センサの検出結果を処理する処理回路とを備え、
前記処理回路は、
同じ噛み合い周波数での第1振動データ及び第2振動データとの差異を算出することと、
前記差異に基づき、前記支持構造の状態診断を行うこととを実行し、
前記第1振動データは、前記支持構造が正常状態である第1期間の噛み合い周波数での前記支持構造の振動を示すデータであり、
前記第2振動データは、前記第1期間よりも後の第2期間における前記第1センサの検出結果から処理された、噛み合い周波数での前記支持構造の振動を示すデータであり、
噛み合い周波数は、前記歯車装置に含まれる歯車の複数の歯が係合対象と噛み合う周波数である、
診断装置。
続きを表示(約 2,800 文字)
【請求項2】
噛み合い周波数は、前記歯車装置の前記歯車の複数の回転速度に基づいた複数の噛み合い周波数を含み、
前記第1振動データは、複数の前記噛み合い周波数それぞれでの前記支持構造の振動を示す複数のデータであり、
前記第2振動データは、前記第1センサの検出結果から、複数の前記噛み合い周波数それぞれでの前記支持構造の振動を示す複数のデータであり、
前記処理回路は、
噛み合い周波数が互いに同じである前記第1振動データと前記第2振動データとの差異を、複数の噛み合い周波数について算出することと、
複数の噛み合い周波数についての複数の前記差異に基づき、前記状態診断をすることと、を実行する、
請求項1に記載の診断装置。
【請求項3】
前記処理回路は、前記複数の差異が形成するピークの周波数範囲と、前記複数の差異が形成するピークの数量と、前記複数の差異が形成するピークでの振動強度の大きさとのうちの1つ以上に基づき、前記状態診断をする
請求項2に記載の診断装置。
【請求項4】
前記歯車装置に配置され且つ前記歯車装置の振動を検出する第2センサをさらに備え、
前記処理回路は、
同じ噛み合い周波数での前記第1振動データと第3振動データとの間の振動強度の比率である第1振動倍率を算出することと、
同じ噛み合い周波数での前記第2振動データと第4振動データとの間の振動強度の比率である第2振動倍率を算出することとをさらに実行し、
前記処理回路は、前記第1振動倍率と前記第2振動倍率との差異である振動倍率差異に基づき、前記状態診断を実行し、
前記第3振動データは、前記第1期間における、噛み合い周波数での前記歯車装置の振動を示すデータであり、
前記第4振動データは、前記第2期間における、前記第2センサの検出結果から処理された、噛み合い周波数での前記歯車装置の振動を示すデータである、
請求項1に記載の診断装置。
【請求項5】
前記歯車装置に配置され且つ前記歯車装置の振動を検出する第2センサをさらに備え、
前記処理回路は、
噛み合い周波数が互いに同じである前記第1振動データと第3振動データとの間の振動強度の比率である第1振動倍率を、複数の噛み合い周波数について算出することと、
前記第2センサの検出結果から処理された、噛み合い周波数が互いに同じである前記第2振動データと第4振動データとの間の振動強度の比率である第2振動倍率を、複数の噛み合い周波数について算出することとをさらに実行し、
前記処理回路は、噛み合い周波数が互いに同じである前記第1振動倍率と前記第2振動倍率との差異である振動倍率差異を、複数の噛み合い周波数について算出し、複数の前記振動倍率差異に基づき、前記状態診断をすることと、を実行し、
前記第3振動データは、前記歯車装置の前記歯車の複数の回転速度に基づいた複数の噛み合い周波数それぞれでの前記歯車装置の振動を示す複数のデータであり、
前記第4振動データは、前記歯車装置の前記歯車の複数の回転速度に基づいた複数の噛み合い周波数それぞれでの前記歯車装置の振動を示す複数のデータである、
請求項2に記載の診断装置。
【請求項6】
前記処理回路は、前記複数の振動倍率差異が形成するピークの周波数範囲と、前記複数の振動倍率差異が形成するピークの数量と、前記複数の振動倍率差異が形成するピークでの振動倍率の大きさとのうちの1つ以上に基づき、前記状態診断をする
請求項5に記載の診断装置。
【請求項7】
前記第1センサは、1つの検出軸の方向、又は、互いに交差する2つの以上の検出軸の方向の振動を検出し、
前記第2センサは、1つの検出軸の方向、又は、互いに交差する2つの以上の検出軸の方向の振動を検出し、
前記処理回路は、前記第1センサの前記検出軸と前記第2センサの前記検出軸との複数の組み合わせに対応する複数の前記振動倍率差異を検出し、前記複数の振動倍率差異に基づき、前記状態診断をする
請求項4に記載の診断装置。
【請求項8】
前記第1センサと、前記歯車装置に配置され且つ前記歯車装置の振動を検出する第2センサとのうちの少なくとも前記第1センサと接続され、接続されたセンサから検出結果を取得するセンサ処理回路と、
前記処理回路の機能のうちの少なくとも一部の機能を有し、前記第1センサ及び前記センサ処理回路から遠隔に配置される遠隔処理回路と、
前記センサ処理回路を通信網にデータ通信可能に接続する第1通信器と、
前記遠隔処理回路を前記通信網にデータ通信可能に接続する第2通信器とをさらに備え、
前記センサ処理回路は、前記処理回路の機能のうちの前記遠隔処理回路が有する機能を除く機能を有し、前記支持構造の前記状態診断に使用する情報を、前記通信網を介して前記遠隔処理回路に送信し、
前記遠隔処理回路は、前記センサ処理回路から受け取った情報を用いて、前記支持構造の前記状態診断をする
請求項1に記載の診断装置。
【請求項9】
複数の歯車装置それぞれを支持する複数の支持構造それぞれの振動を検出する複数の第1センサと、
前記複数の第1センサと、前記複数の歯車装置に配置され且つ前記複数の歯車装置それぞれの振動を検出する複数の第2センサとのうちの少なくとも前記複数の第1センサそれぞれと接続され、接続されたセンサから検出結果を取得する複数の前記センサ処理回路と、
前記複数のセンサ処理回路それぞれを前記通信網にデータ通信可能に接続する複数の前記第1通信器とを備え、
前記遠隔処理回路は、前記複数のセンサ処理回路から受け取った情報を用いて、前記複数の支持構造の前記状態診断をする
請求項8に記載の診断装置。
【請求項10】
歯車装置の支持構造の診断方法であって、
同じ噛み合い周波数での第1振動データ及び第2振動データとの差異を算出することと、
前記差異に基づき、前記支持構造の状態診断を行うこととを実行し、
前記第1振動データは、第1期間における噛み合い周波数での、歯車装置を支持する支持構造の振動を示すデータであり、
前記第2振動データは、前記第1期間よりも後の第2期間における噛み合い周波数での前記支持構造の振動を示すデータであり、
噛み合い周波数は、前記歯車装置に含まれる歯車の複数の歯が係合対象と噛み合う周波数である
診断方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、歯車装置の支持構造の診断装置及び診断方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、鉄道車両の台車を構成する歯車装置の軸受の状態を検知する装置を開示する。当該装置は、鉄道車両の実走行前に測定された軸受の振動に係るパラメータを含む情報に基づいて、軸受の損傷の実態を検知する。
【先行技術文献】
【特許文献】
【0003】
特開2015-111113号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の装置は、歯車装置の状態の異常を検知する。しかしながら、歯車装置を支持する支持構造は、様々な荷重及び振動を受けることがあるため、支持構造の状態にも異常が発生する場合がある。
【0005】
そこで本開示の一態様は、歯車装置の支持構造の診断装置及び診断方法を提供することを目的とする。
【0006】
本開示の一態様に係る歯車装置の支持構造の診断装置は、歯車装置の支持構造の診断装置であって、歯車装置を支持する支持構造の振動を検出する第1センサと、前記第1センサの検出結果を処理する処理回路とを備え、前記処理回路は、同じ噛み合い周波数での第1振動データ及び第2振動データとの差異を算出することと、前記差異に基づき、前記支持構造の状態診断を行うこととを実行し、前記第1振動データは、前記支持構造が正常状態である第1期間の噛み合い周波数での前記支持構造の振動を示すデータであり、前記第2振動データは、前記第1期間よりも後の第2期間における前記第1センサの検出結果から処理された、噛み合い周波数での前記支持構造の振動を示すデータであり、噛み合い周波数は、前記歯車装置に含まれる歯車の複数の歯が係合対象と噛み合う周波数である。
【図面の簡単な説明】
【0007】
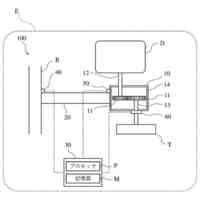
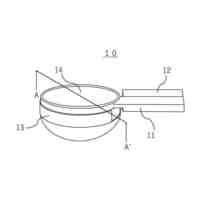
図1は、実施の形態に係る診断システムの構成の一例を示す図である。
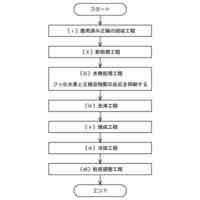
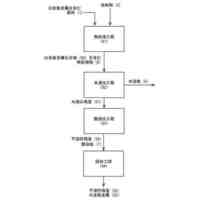
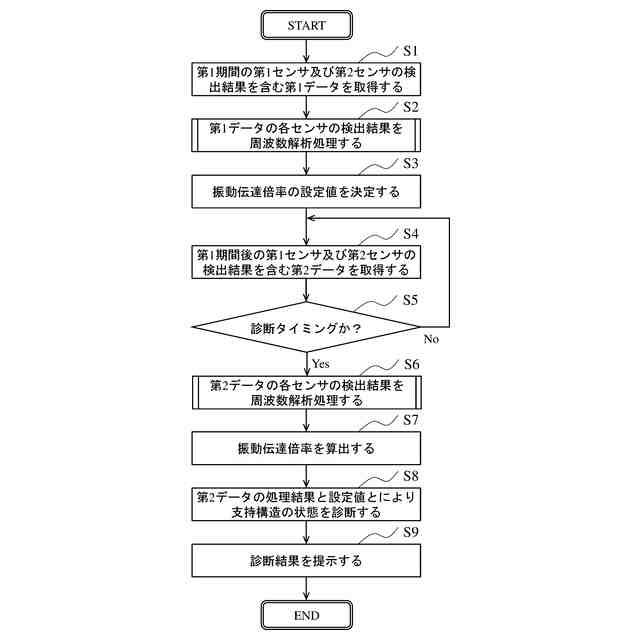
図2は、実施の形態に係る診断装置の動作の一例を示すフローチャートである。
図3は、図2のフローチャートのステップS2の詳細を示すフローチャートである。
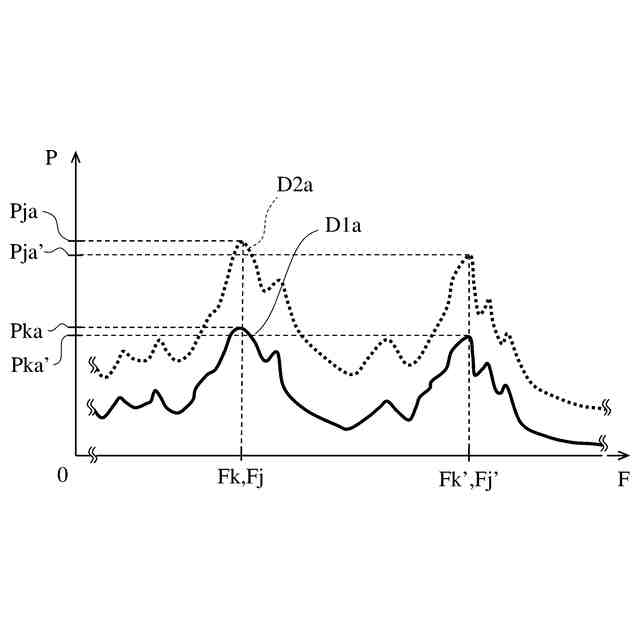
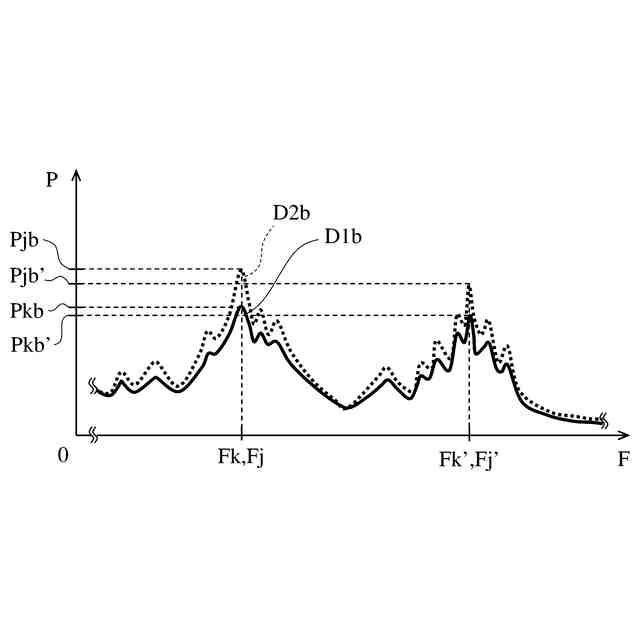
図4は、第1データ及び第2データについての第1センサの時間期間の検出信号の周波数解析結果の一例を示す図である。
図5は、第1データ及び第2データについての第2センサの時間期間の検出信号の周波数解析結果の一例を示す図である。
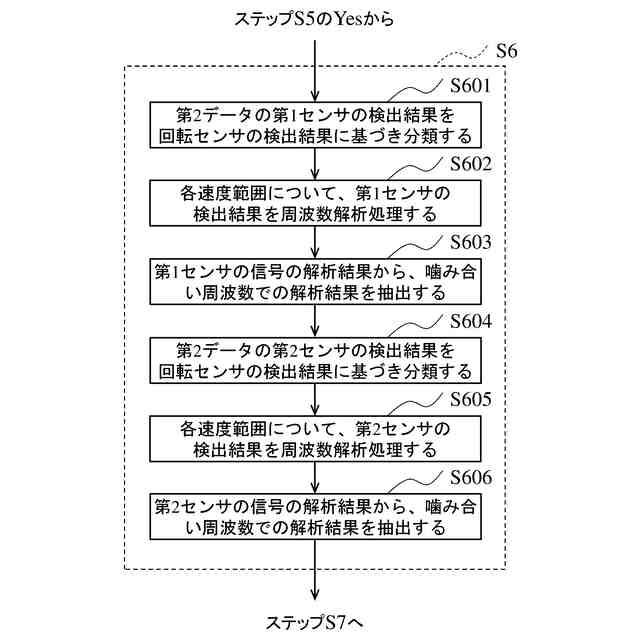
図6は、図2のフローチャートのステップS6の詳細を示すフローチャートである。
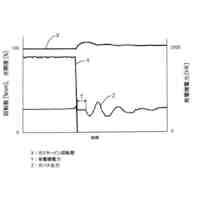
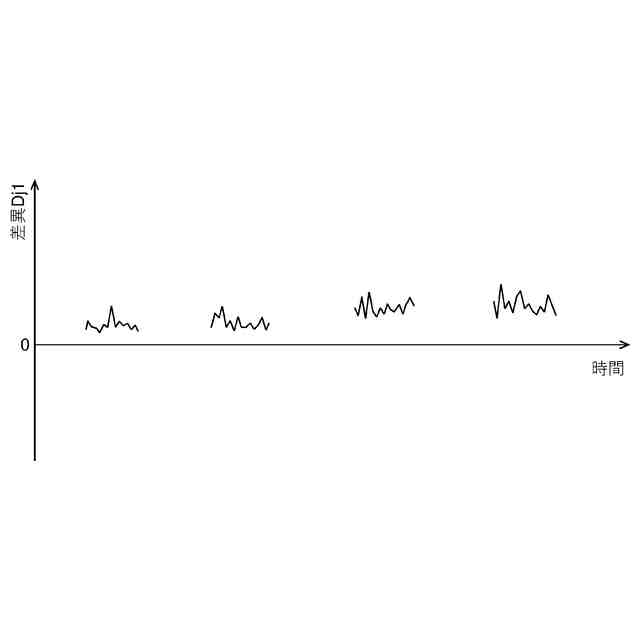
図7は、1つの噛み合い周波数における振動伝達倍率の差異の時系列データの一例を示す図である。
図8は、変形例1に係る診断システムの構成の一例を示す図である。
図9は、変形例1に係る診断装置の動作の一例を示すフローチャートである。
図10は、図9のフローチャートのステップS2Aの詳細を示すフローチャートである。
図11は、図9のフローチャートのステップS6Aの詳細を示すフローチャートである。
図12は、変形例2に係る診断システムの構成の一例を示す図である。
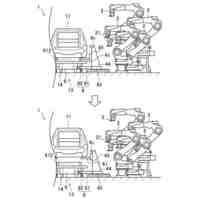
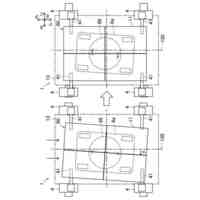
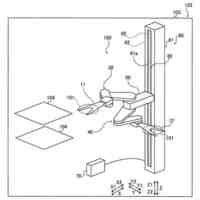
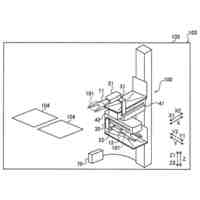
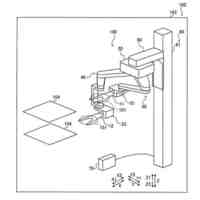
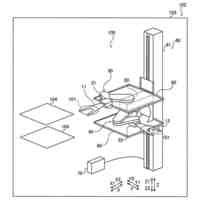
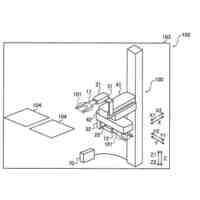
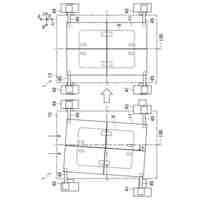
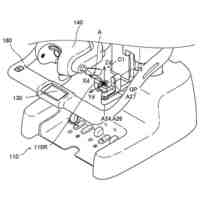
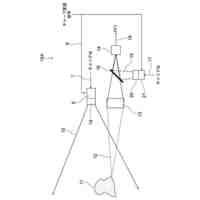
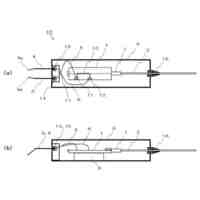
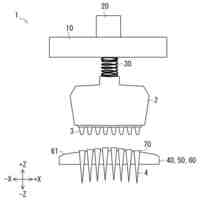
図13は、診断システムの適用例を示す正面図である。
図14は、診断システムの適用例を示す側面図である。
図15は、診断システムの適用例を示す側面図である。
【発明を実施するための形態】
【0008】
以下において、本開示の例示的な実施の形態を、図面を参照しつつ説明する。以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。添付の図面における各図は、模式的な図であり、必ずしも厳密に図示されたものでない。各図において、実質的に同一の構成要素に対しては同一の符号を付しており、重複する説明は省略又は簡略化される場合がある。本明細書及び請求項では、「装置」とは、1つの装置を意味し得るだけでなく、複数の装置を含むシステムも意味し得る。
【0009】
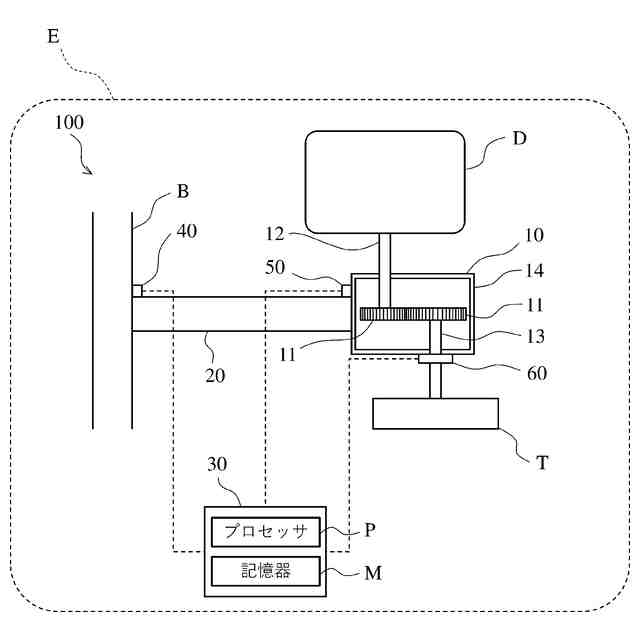
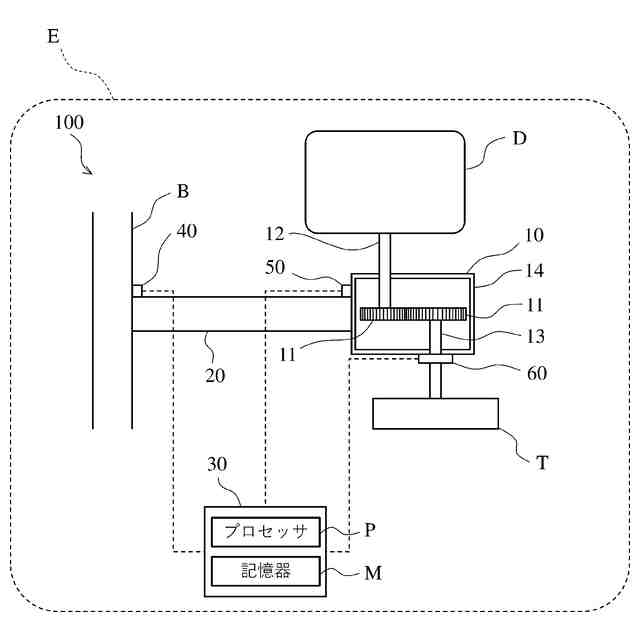
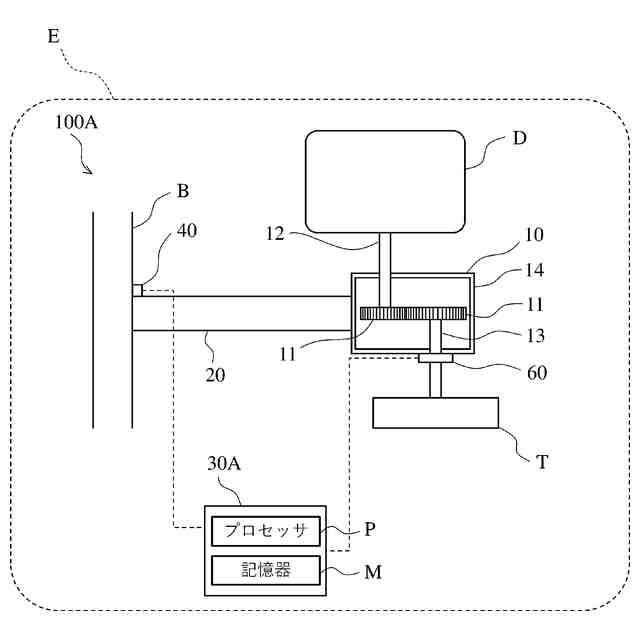
図1を参照しつつ、例示的な実施の形態に係る診断システム100を説明する。図1は、実施の形態に係る診断システム100の構成の一例を示す図である。診断システム100は、診断装置30と、歯車装置10を支持する支持構造20の振動を検出する第1センサ40とを含む。限定されないが、本実施の形態では、診断システム100は、歯車装置10の振動を検出する第2センサ50をさらに含む。
【0010】
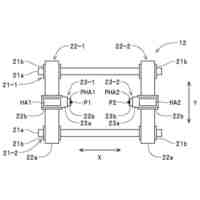
歯車装置10は、駆動源Dの駆動力を駆動対象Tに伝達する。図1では、歯車装置10の内部が示される。歯車装置10は、複数の歯車11を含み、複数の歯車11のうちの少なくとも2つがギヤ係合する。限定されないが、本実施の形態では、歯車装置10は、それぞれに1つ以上の歯車11が取り付けられた2つの軸12及び13と、筐体14とを含む。筐体14は、複数の歯車11と、軸12及び13とを収容する。第1軸12の歯車11と、第2軸13の歯車11とは、直接的にギヤ係合するが、他の歯車11を介して間接的にギヤ係合してもよい。例えば、第1軸12は、駆動力を伝達可能に駆動源Dと接続され、第2軸13は、駆動力を伝達可能に駆動対象Tと接続される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
位置情報システム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
クローズドインペラ
3日前
川崎重工業株式会社
正極活物質の再生方法
4日前
川崎重工業株式会社
ロボットシステム及びロボット
3日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
10日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
2日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
7日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
個人
計量スプーン
3日前
個人
微小振動検出装置
14日前
ユニパルス株式会社
力変換器
1か月前
株式会社イシダ
X線検査装置
14日前
三菱電機株式会社
計測器
29日前
株式会社辰巳菱機
システム
23日前
日置電機株式会社
測定装置
1か月前
IPU株式会社
距離検出装置
1か月前
アンリツ株式会社
分光器
9日前
株式会社FRPカジ
FRP装置
25日前
ダイハツ工業株式会社
測定用具
7日前
アンリツ株式会社
分光器
9日前
株式会社東芝
センサ
14日前
TDK株式会社
磁気センサ
3日前
株式会社精工技研
光電圧プローブ
15日前
富士レビオ株式会社
嵌合システム
28日前
株式会社ヨコオ
コンタクタ
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ