TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134356
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032207
出願日
2024-03-04
発明の名称
骨格検出装置、行動予測装置、車両及び骨格検出プログラム
出願人
株式会社デンソーテン
代理人
弁理士法人 佐野特許事務所
主分類
G08G
1/16 20060101AFI20250909BHJP(信号)
要約
【課題】処理負荷と必要な骨格検出精度(必要なキーポイント数)とのバランスを適正化する。
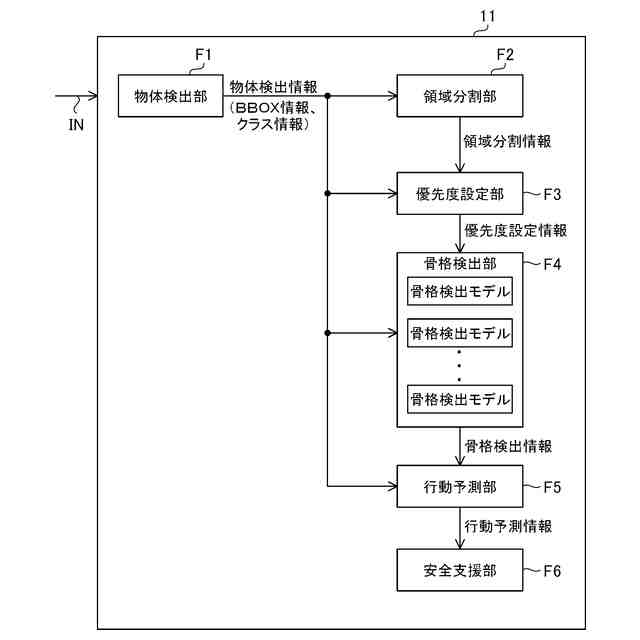
【解決手段】骨格検出装置は、検出されるキーポイント数が互いに異なる複数の骨格検出モデルを有する。骨格検出装置は、複数の対象物の像を含む入力画像(IN)の画像データに基づき入力画像における各対象物のキーポイントを複数の骨格検出モデルを用いて検出する。骨格検出装置は、入力画像の画像データに基づき各対象物に対して優先度を設定し、優先度の設定結果に基づき各対象物を複数の骨格検出モデルの何れかに割り当てる。
【選択図】図8
特許請求の範囲
【請求項1】
検出されるキーポイント数が互いに異なる複数の骨格検出モデルを有し、複数の対象物の像を含む入力画像の画像データに基づき前記入力画像における各対象物のキーポイントを前記複数の骨格検出モデルを用いて検出する骨格検出装置であって、
前記入力画像の画像データに基づき各対象物に対して優先度を設定し、前記優先度の設定結果に基づき各対象物を前記複数の骨格検出モデルの何れかに割り当てる
、骨格検出装置。
続きを表示(約 1,900 文字)
【請求項2】
前記複数の骨格検出モデルは第1骨格検出モデル及び第2骨格検出モデルを含み、前記第1骨格検出モデルにて検出されるキーポイント数は前記第2骨格検出モデルにて検出されるキーポイント数よりも大きく、
前記複数の対象物の内、相対的に高い優先度が設定された対象物を、相対的に低い優先度が設定された対象物よりも、優先して前記第1骨格検出モデルに割り当てる
、請求項1に記載の骨格検出装置。
【請求項3】
車両に設置されたカメラの撮影画像を前記入力画像として取得し、
前記入力画像における各対象物の位置、前記入力画像における各対象物のサイズ、及び、前記車両の走行状態に基づき、各対象物に対して前記優先度を設定する
、請求項1又は2に記載の骨格検出装置。
【請求項4】
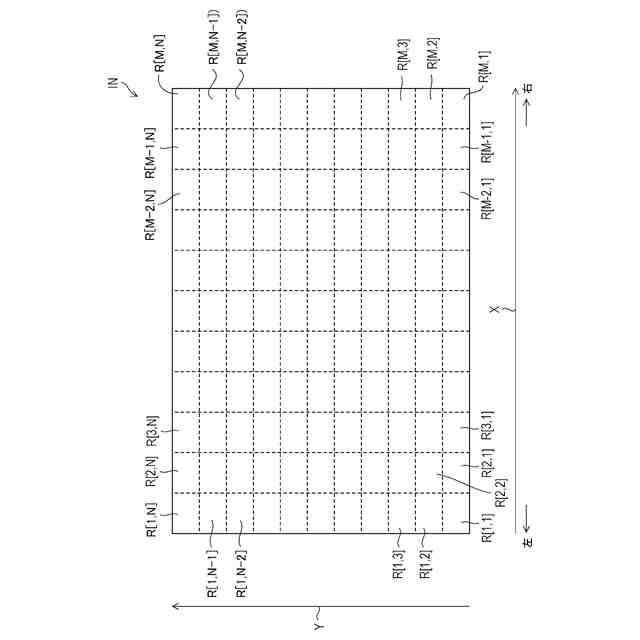
前記入力画像を複数のグリッド領域に分割して各対象物が何れのグリッド領域に位置するかを特定し、
前記特定の結果と、前記入力画像における各対象物のサイズと、前記車両の速度と、に基づき、各対象物に対して前記優先度を設定する
、請求項3に記載の骨格検出装置。
【請求項5】
前記入力画像における各対象物のサイズを複数のサイズクラスに分類し、
近方グリッド領域に位置する近方対象物のサイズと遠方グリッド領域に位置する遠方対象物のサイズとを共通のサイズクラスに分類した場合において、前記車両の速度が第1速度域に属するときには、前記近方対象物に対し前記遠方対象物よりも相対的に高い優先度を設定し、前記車両の速度が前記第1速度域よりも大きな第2速度域に属するときには、前記遠方対象物に対し前記近方対象物よりも相対的に高い優先度を設定し、
前記近方グリッド領域及び前記遠方グリッド領域は前記複数のグリッド領域の何れかであり、
前記近方グリッド領域は、前記遠方グリッド領域と比べ、前記車両からの距離が相対的に小さい物体の像が現れるグリッド領域である
、請求項4に記載の骨格検出装置。
【請求項6】
共通のグリッド領域に2以上の対象物が位置する場合、前記2以上の対象物の内、相対的に大きなサイズクラスに分類された対象物に対し、相対的に小さなサイズクラスに分類された対象物より、前記優先度を高く設定する
、請求項5に記載の骨格検出装置。
【請求項7】
前記入力画像を複数のグリッド領域に分割して各対象物が何れのグリッド領域に位置するかを特定し、
前記特定の結果と、前記入力画像における各対象物のサイズと、前記車両の舵角情報又は前記車両の舵角が反映される前記車両の加速度情報と、に基づき、各対象物に対して前記優先度を設定する
、請求項3に記載の骨格検出装置。
【請求項8】
前記車両の舵角情報又は前記加速度情報に基づき前記車両が右に曲がる右方進行状態又は左に曲がる左方進行状態にあるかを判定し、
前記入力画像における各対象物のサイズを複数のサイズクラスに分類し、
右方グリッド領域に位置する右方対象物のサイズと左方グリッド領域に位置する左方対象物のサイズとを共通のサイズクラスに分類した場合において、前記車両が前記右方進行状態にあると判定したときには、前記右方対象物に対し前記左方対象物よりも相対的に高い優先度を設定し、前記車両が前記左方進行状態にあると判定したときには、前記左方対象物に対し前記右方対象物よりも相対的に高い優先度を設定し、
前記右方グリッド領域及び前記左方グリッド領域は前記複数のグリッド領域の何れかであり、
前記右方グリッド領域は前記車両の外部における右側領域の像が現れるグリッド領域であって、前記左方グリッド領域は前記車両の外部における左側領域の像が現れるグリッド領域である
、請求項7に記載の骨格検出装置。
【請求項9】
共通のグリッド領域に2以上の対象物が位置する場合、前記2以上の対象物の内、相対的に大きなサイズクラスに分類された対象物に対し、相対的に小さなサイズクラスに分類された対象物より、前記優先度を高く設定する
、請求項8に記載の骨格検出装置。
【請求項10】
請求項1又は2に記載の骨格検出装置を有し、各対象物のキーポイントの検出結果に基づき各対象物としての人物又は動物の行動を予測する
、行動予測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、骨格検出装置、行動予測装置、車両及び骨格検出プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
ニューラルネットワークを用いた骨格検出(骨格推定)が広く実用化されている。骨格検出としてトップダウン型の骨格検出とボトムアップ型の骨格検出があり、前者の方か後者よりも良好な特性を得やすいことが知られている。但し、トップダウン型の骨格検出では、画像内における骨格検出の対象物数が多くなりすぎると、処理負荷(計算時間)が大きくなりすぎることが懸念される(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-42233号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
トップダウン型の骨格検出において、検出されるキーポイント数を減じれば処理負荷が小さくなるが、キーポイント数の低減は骨格検出の精度低減(検出されるキーポイントが粗くなることに対応)をもたらす。一方で精度を優先し、画像内の全対象物に対して一律に高精度の骨格検出(キーポイント数が多い骨格検出)を行うことは処理負担の面から適正とは言い難い。処理負荷と必要な骨格検出精度とのバランスを図る技術の開発が期待される。
【0005】
本発明は、処理負荷と必要な骨格検出精度(必要なキーポイント数)とのバランスを適正化する技術を提案することを目的とする。
【課題を解決するための手段】
【0006】
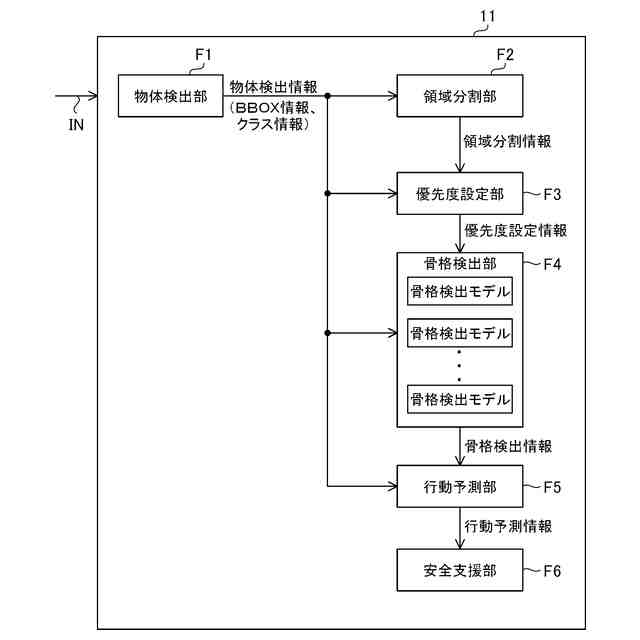
本発明に係る骨格検出装置は、検出されるキーポイント数が互いに異なる複数の骨格検出モデルを有し、複数の対象物の像を含む入力画像の画像データに基づき前記入力画像における各対象物のキーポイントを前記複数の骨格検出モデルを用いて検出する骨格検出装置であって、前記入力画像の画像データに基づき各対象物に対して優先度を設定し、前記優先度の設定結果に基づき各対象物を前記複数の骨格検出モデルの何れかに割り当てる。
【発明の効果】
【0007】
複数の対象物の内、重要性が高いと考えられる対象物を、優先的にキーポイント数が多い側の骨格検出モデル(高精度側の骨格検出モデル)に割り当てることが好ましい。一方、入力画像の画像データに基づけば各対象物の重要性(例えば車両への適用時には安全性確保にとっての重要性)を推測可能である。上記骨格検出装置の如く、入力画像の画像データに基づき各対象物に対して優先度を設定し、優先度の設定結果に基づき各対象物を複数の骨格検出モデルの何れかに割り当てる。これにより、重要性が高いと考えられる対象物を、優先的にキーポイント数が多い側の骨格検出モデルに割り当てること可能となる。結果、処理負荷と必要な骨格検出精度(必要なキーポイント数)とのバランスを、適正にすることが可能となる。
【図面の簡単な説明】
【0008】
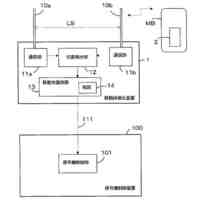
本発明の実施形態に係り、ユーザと他の構成要素との関係を示す図である。
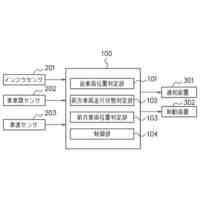
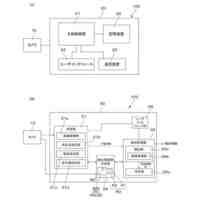
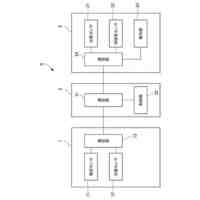
本発明の実施形態に係る車載システムの内部構成図である。
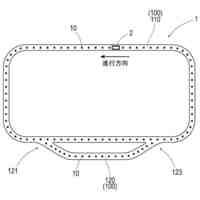
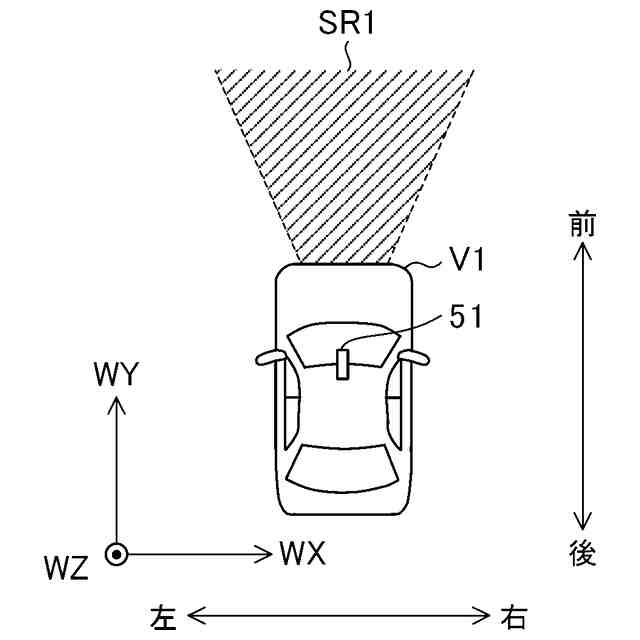
本発明の実施形態に係るカメラの撮影領域を示す図である。
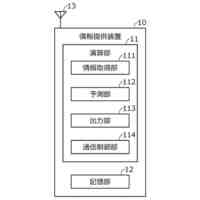
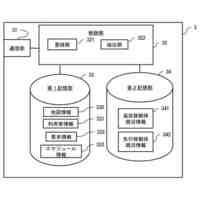
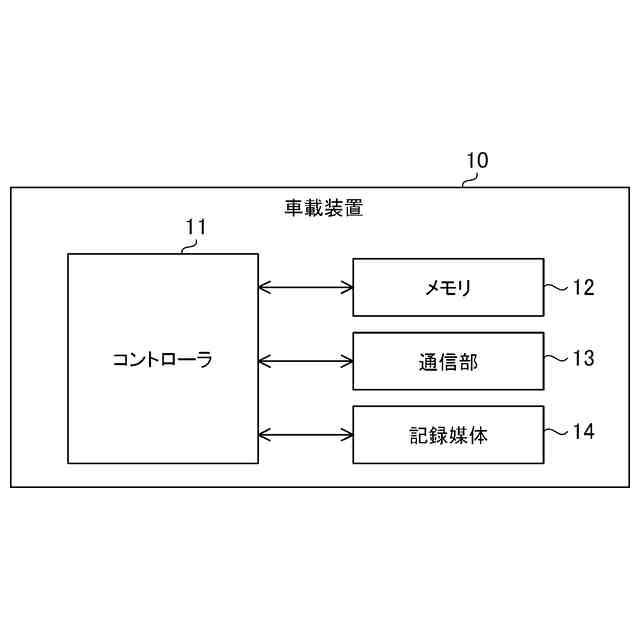
本発明の実施形態に係る車載装置の内部構成図である。
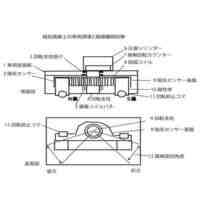
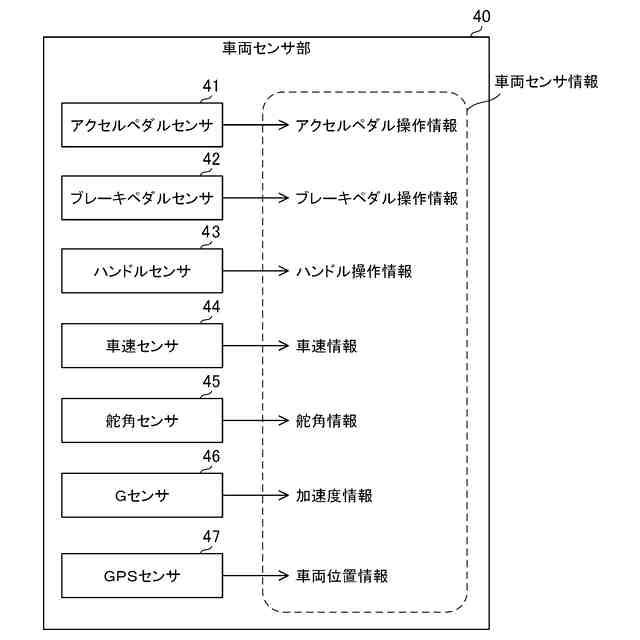
本発明の実施形態に係る車両センサ部の内部構成図である。
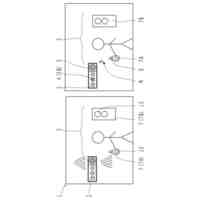
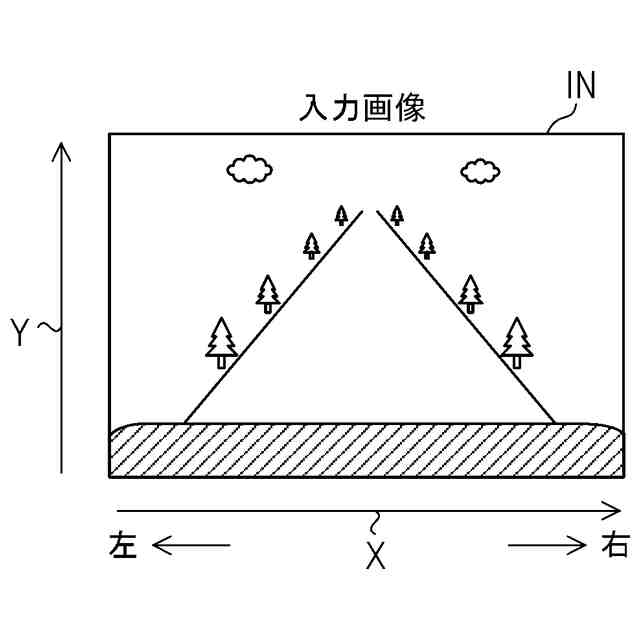
本発明の実施形態に係り、入力画像の例を示す図である。
本発明の実施形態に係り、入力画像が複数のグリッド領域に分割される様子を示す図である。
本発明の実施形態に係り、車載装置におけるコントローラの機能ブロック図である。
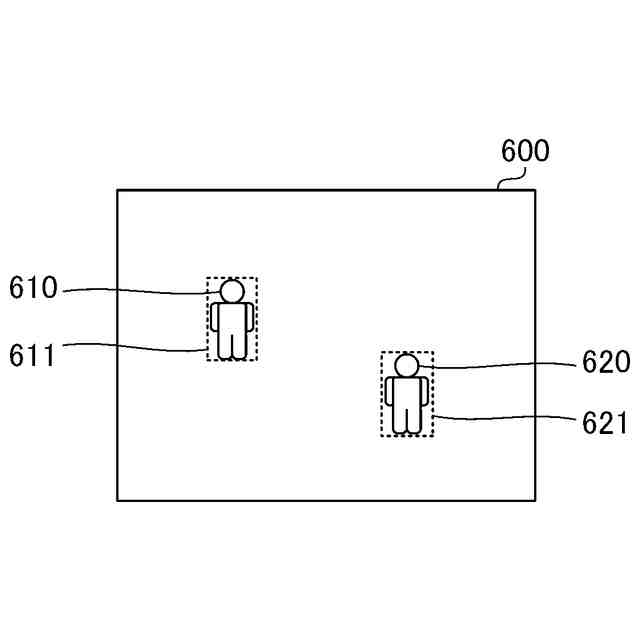
本発明の実施形態に係り、入力画像内の各人物に対してバウンディングボックスが設定される様子を示す図である。
本発明の実施形態に係り、入力画像列の構成を示す図である。
本発明の実施形態に係り、グリッド領域と優先度との関係を説明するための図である。
本発明の実施形態に係り、物体サイズが4種類のサイズクラスに分類される様子を示す図である。
本発明の実施形態に係り、骨格検出部に2つの骨格検出モデルが設けられる様子を示す図である。
本発明の実施形態に属する第1実施例に係り、入力画像内に複数の人物が存在する様子を示す図である。
本発明の実施形態に属する第1実施例に係り、車両の速度状態が3種類に分類される様子を示す図である。
本発明の実施形態に属する第2実施例に係り、入力画像内に複数の人物が存在する様子を示す図である。
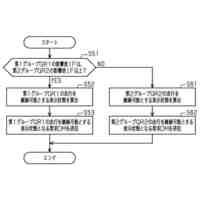
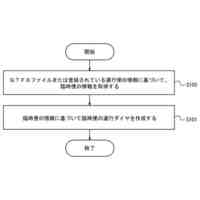
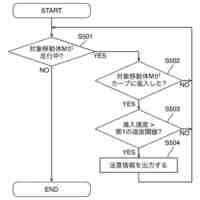
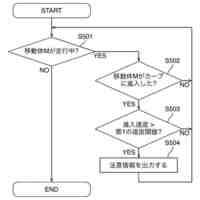
本発明の実施形態に属する第5実施例に係り、車載装置におけるコントローラの動作フローチャートである。
本発明の実施形態に属する第6実施例に係り、遮蔽可能物の像を含む入力画像を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態の例を、図面を参照して具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。尚、本明細書では、記述の簡略化上、情報、信号、物理量、機能部、回路、素子又は部品等を参照する記号又は符号を記すことによって、該記号又は符号に対応する情報、信号、物理量、機能部、回路、素子又は部品等の名称を省略又は略記することがある。
【0010】
図1に本発明の実施形態にて想定されるユーザU1と他の構成要素との関係を示す。ユーザU1は車両V1の乗員である。ユーザU1は車両V1の運転者(ドライバ)である。以下、単に運転者といった場合、それは車両V1の運転者(故にユーザU1)を指すものとする。但し、ユーザU1は運転者以外の乗員(即ち車両V1の同乗者)であっても良い。車両V1は任意の種類の車両である。ここでは車両V1は路面上を走行する自動車等であるとする。車両V1に対し車載システム1が搭載され、車載システム1の各構成部品は車両V1の適所に設置される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
警報システム
29日前
個人
自動電動車椅子
12日前
エムケー精工株式会社
車両誘導装置
1か月前
スズキ株式会社
運転支援装置
28日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
22日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
20日前
株式会社国際電気
防災システム
1か月前
ニッタン株式会社
検知器
20日前
個人
磁気路上での車両の路線離脱防御
1日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
サーバ
5日前
日本信号株式会社
異常走行検出装置
5日前
株式会社小糸製作所
移動体検出装置
22日前
株式会社小糸製作所
車両検出システム
22日前
日本精機株式会社
報知装置及び報知システム
11日前
能美防災株式会社
火災感知器
25日前
本田技研工業株式会社
運転評価装置
2か月前
能美防災株式会社
非常伝達装置
28日前
本田技研工業株式会社
情報提供装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
ヨシモトポール株式会社
接近報知システム
25日前
本田技研工業株式会社
情報提供装置
1か月前
シャープ株式会社
駐車制御装置
4日前
株式会社豊田中央研究所
注意喚起装置
13日前
本田技研工業株式会社
保険料算出装置
2か月前
株式会社アイシン
運転支援装置
1か月前
トヨタ自動車株式会社
方法
1か月前
古野電気株式会社
航路計画システム及び航路計画方法
1か月前
パイオニア株式会社
情報処理装置
1日前
パイオニア株式会社
情報処理装置
1日前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社 ミックウェア
追従移動支援装置、端末装置
4日前
ALSOK株式会社
警備システム及び警備方法
12日前
株式会社デンソーウェーブ
セキュリティシステム
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ