TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135418
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024033258
出願日
2024-03-05
発明の名称
バルブハンドル締め付け方法
出願人
学校法人法政大学
,
ENEOS株式会社
代理人
個人
,
個人
,
個人
主分類
B25B
23/142 20060101AFI20250910BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】制限トルク及び閉止トルクが異なる複数種類のバルブハンドルが配置される領域内での全てのバルブハンドルを容易に締め付けることができ、且つ、次に作業者がバルブを開く時に過大なトルクが必要になることを抑制できるバルブハンドル締め付け方法を提供する。
【解決手段】制限トルク及び閉止トルクが異なる複数種類のバルブハンドルが配置される領域内で前記バルブハンドルを締め付けるバルブハンドル締め付け方法であって、前記バルブハンドルに作用するトルクが前記領域内で最も小さい前記制限トルクよりも小さく前記領域内で最も大きい前記閉止トルクよりも大きい設定トルクになった時に通知を行う通知部を有するハンドル回し補助具を介して前記バルブハンドルを締め付けるバルブハンドル締め付け方法。
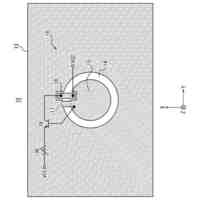
【選択図】図1
特許請求の範囲
【請求項1】
制限トルク及び閉止トルクが異なる複数種類のバルブハンドルが配置される領域内で前記バルブハンドルを締め付けるバルブハンドル締め付け方法であって、
前記バルブハンドルに作用するトルクが前記領域内で最も小さい前記制限トルクよりも小さく前記領域内で最も大きい前記閉止トルクよりも大きい設定トルクになった時に通知を行う通知部を有するハンドル回し補助具を介して前記バルブハンドルを締め付けるバルブハンドル締め付け方法。
続きを表示(約 960 文字)
【請求項2】
前記通知部の前記設定トルクを前記領域内で最も小さい前記制限トルクよりも小さく前記領域内で最も大きい前記閉止トルクよりも大きくなるように設定する設定ステップと、
前記設定ステップで前記設定トルクが設定された前記ハンドル回し補助具を介して前記バルブハンドルを締め付ける締め付けステップとを有する、請求項1に記載のバルブハンドル締め付け方法。
【請求項3】
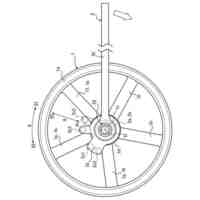
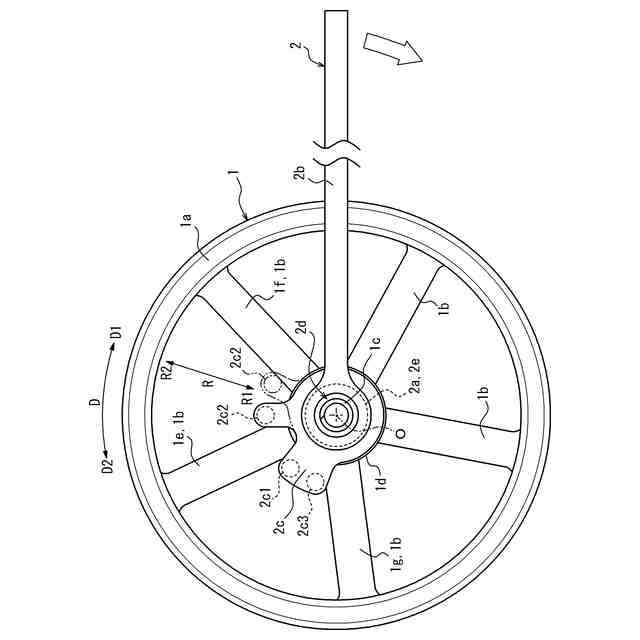
前記バルブハンドルは、周方向に全周に亘って延びるハンドル部と、前記ハンドル部からそれぞれ径方向内側に延びる複数のスポーク部とを有し、
前記ハンドル回し補助具は、把持部材と、前記把持部材に前記通知部を介して連結され前記バルブハンドルに引っ掛かる引っ掛かり部材とを有し、
前記引っ掛かり部材を前記バルブハンドルに引っ掛けた引っ掛け状態で前記把持部材を周方向一方側に操作することで前記バルブハンドルを締め付ける締め付けステップを有する、請求項1に記載のバルブハンドル締め付け方法。
【請求項4】
前記引っ掛かり部材は、第1の前記スポーク部の周方向他方側部分に引っ掛かる第1引っ掛かり部と、前記第1のスポーク部の周方向一方側部分及び前記第1のスポーク部と異なる第2の前記スポーク部の周方向他方側部分の少なくとも一方に引っ掛かる第2引っ掛かり部とを有し、
前記引っ掛け状態は、前記第1引っ掛かり部を前記第1のスポーク部の前記周方向他方側部分に引っ掛け且つ前記第2引っ掛かり部を前記第1のスポーク部の前記周方向一方側部分及び前記第2のスポーク部の前記周方向他方側部分の上記少なくとも一方に引っ掛けた状態である、請求項3に記載のバルブハンドル締め付け方法。
【請求項5】
前記引っ掛かり部材は、前記ハンドル部における径方向外側部分に引っ掛かる第1引っ掛かり部と、前記ハンドル部における径方向内側部分に引っ掛かる第2引っ掛かり部とを有し、
前記引っ掛け状態は、前記第1引っ掛かり部を前記ハンドル部における前記径方向外側部分に引っ掛け且つ前記第2引っ掛かり部を前記ハンドル部における前記径方向内側部分に引っ掛けた状態である、請求項3に記載のバルブハンドル締め付け方法。
発明の詳細な説明
【技術分野】
【0001】
本発明はバルブハンドル締め付け方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
工場などの所定の領域内においてバルブハンドルを締め付けるバルブハンドル締め付け方法が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
実開昭55-7670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
バルブには、バルブが閉められるのに最低限必要な閉止トルクと、バルブが適正に動作する範囲を保証する制限トルクと、バルブが破壊されてしまう破壊トルクとの3つの設計値が存在する。この数値は、バルブのサイズ毎に異なり、基本的に大きいバルブサイズになるほど大きくなる。
【0005】
本発明の目的は、制限トルク及び閉止トルクが異なる複数種類のバルブハンドルが配置される領域内での全てのバルブハンドルを容易に締め付けることができ、且つ、次に作業者がバルブを開く時に過大なトルクが必要になることを抑制できるバルブハンドル締め付け方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様は以下のとおりである。
【0007】
[1]
制限トルク及び閉止トルクが異なる複数種類のバルブハンドルが配置される領域内で前記バルブハンドルを締め付けるバルブハンドル締め付け方法であって、
前記バルブハンドルに作用するトルクが前記領域内で最も小さい前記制限トルクよりも小さく前記領域内で最も大きい前記閉止トルクよりも大きい設定トルクになった時に通知を行う通知部を有するハンドル回し補助具を介して前記バルブハンドルを締め付けるバルブハンドル締め付け方法。
【0008】
[2]
前記通知部の前記設定トルクを前記領域内で最も小さい前記制限トルクよりも小さく前記領域内で最も大きい前記閉止トルクよりも大きくなるように設定する設定ステップと、
前記設定ステップで前記設定トルクが設定された前記ハンドル回し補助具を介して前記バルブハンドルを締め付ける締め付けステップとを有する、[1]に記載のバルブハンドル締め付け方法。
【0009】
[3]
前記バルブハンドルは、周方向に全周に亘って延びるハンドル部と、前記ハンドル部からそれぞれ径方向内側に延びる複数のスポーク部とを有し、
前記ハンドル回し補助具は、把持部材と、前記把持部材に前記通知部を介して連結され前記バルブハンドルに引っ掛かる引っ掛かり部材とを有し、
前記引っ掛かり部材を前記バルブハンドルに引っ掛けた引っ掛け状態で前記把持部材を周方向一方側に操作することで前記バルブハンドルを締め付ける締め付けステップを有する、[1]又は[2]に記載のバルブハンドル締め付け方法。
【0010】
[4]
前記引っ掛かり部材は、第1の前記スポーク部の周方向他方側部分に引っ掛かる第1引っ掛かり部と、前記第1のスポーク部の周方向一方側部分及び前記第1のスポーク部と異なる第2の前記スポーク部の周方向他方側部分の少なくとも一方に引っ掛かる第2引っ掛かり部とを有し、
前記引っ掛け状態は、前記第1引っ掛かり部を第1の前記スポーク部の前記周方向他方側部分に引っ掛け且つ前記第2引っ掛かり部を前記第1のスポーク部の前記周方向一方側部分及び前記第2のスポーク部の前記周方向他方側部分の上記少なくとも一方に引っ掛けた状態である、[3]に記載のバルブハンドル締め付け方法。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人法政大学
誘電率測定装置
2か月前
学校法人法政大学
装着型アシスト装置
5か月前
学校法人法政大学
バルブハンドル締め付け方法
11日前
学校法人法政大学
移動体及び無線給電システム
5か月前
学校法人法政大学
金属資源の乾式精錬方法及び乾式精錬装置
3か月前
学校法人法政大学
磁化推定装置、磁化推定方法、及びプログラム
19日前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
2か月前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
7か月前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
3か月前
学校法人法政大学
磁化推定装置、磁化推定システム、磁化推定方法、学習モデルの生成方法、及びプログラム
3か月前
北日本海事興業株式会社
水中作業用パワーアシストスーツ駆動装置、およびパワーアシストスーツシステム
7か月前
個人
固定補助具
1か月前
個人
折りたたみ工具
21日前
株式会社三協システム
製函機
19日前
CKD株式会社
把持装置
20日前
株式会社三協システム
移載装置
18日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
26日前
SMC株式会社
着脱装置
19日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
21日前
株式会社ミクロブ
把持装置
20日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
今日
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
18日前
本田技研工業株式会社
装置
3日前
株式会社不二越
エッジ仕上げ装置
10日前
株式会社不二越
ロボットシステム
21日前
トヨタ自動車株式会社
歩行ロボット
24日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
11日前
ダイハツ工業株式会社
移載治具
1か月前
ライオン株式会社
移載システム
12日前
大和ハウス工業株式会社
ねじ回転工具
19日前
株式会社不二越
協働ロボットシステム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ