TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141298
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041172
出願日
2024-03-15
発明の名称
画像処理装置、画像処理方法及び画像処理プログラム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06T
7/20 20170101AFI20250919BHJP(計算;計数)
要約
【課題】一時的にオブジェクトが検出されなくなってもオブジェクトの追跡を継続する。
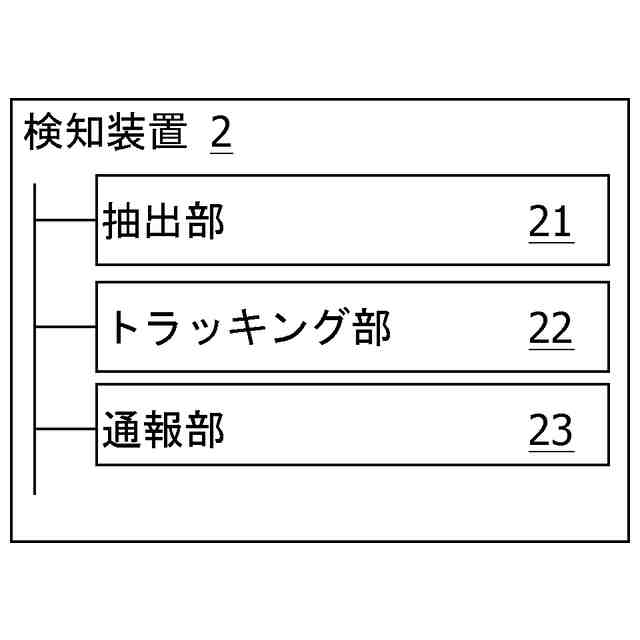
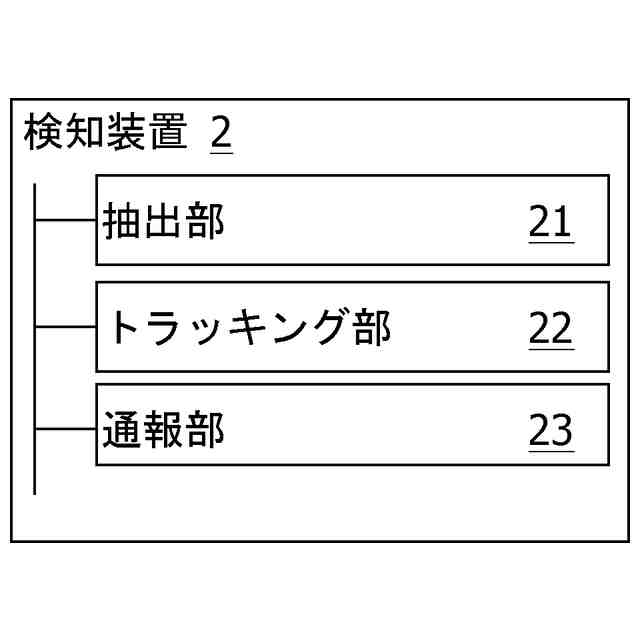
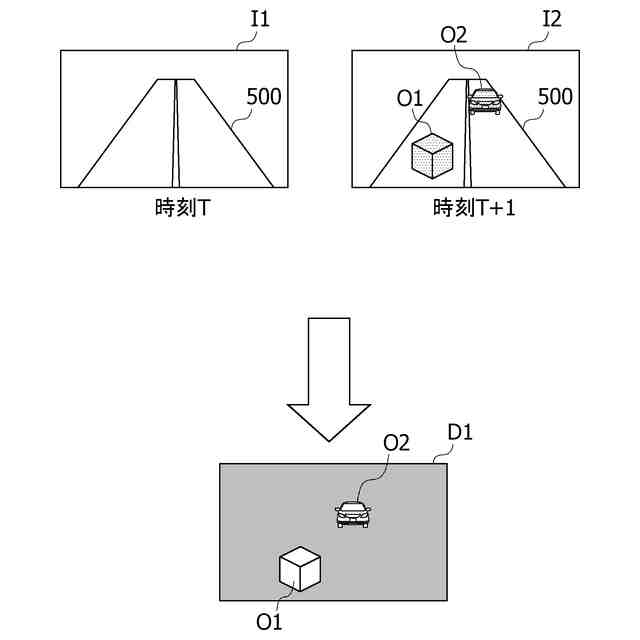
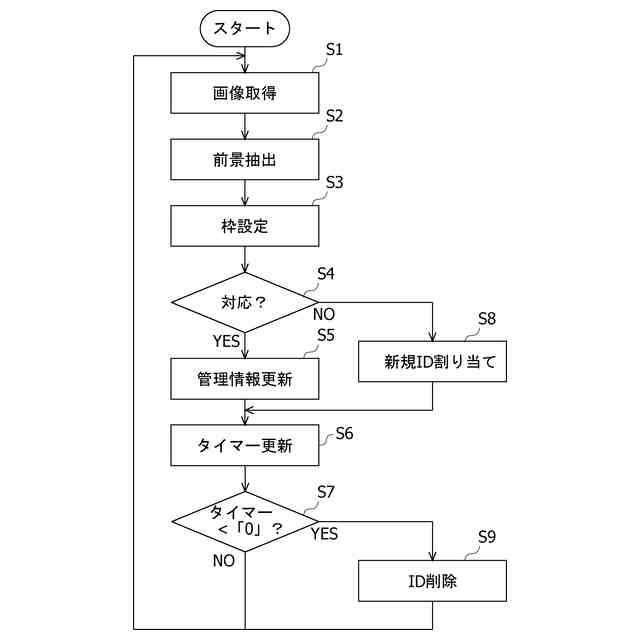
【解決手段】本画像処理装置は、カメラによって道路が撮影された動画の第1のフレーム画像を取得する処理と、上記第1のフレーム画像から上記道路上のオブジェクトを抽出する処理と、上記第1のフレーム画像から抽出された上記オブジェクトの第1の位置を検出するとともに、上記オブジェクトに対応付けたタイマーを設定する処理と、上記第1のフレーム画像の後に取得された第2のフレーム画像において上記第1の位置に上記オブジェクトが抽出されない場合には、上記タイマーを進める処理と、上記タイマーが満了するまでの間は、上記オブジェクトの追跡を継続する処理と、を実行する制御部を備える。
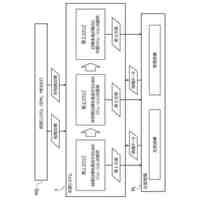
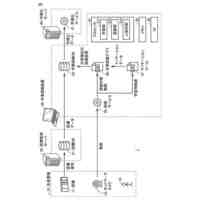
【選択図】図3
特許請求の範囲
【請求項1】
カメラによって道路が撮影された動画の第1のフレーム画像を取得する処理と、
前記第1のフレーム画像から前記道路上のオブジェクトを抽出する処理と、
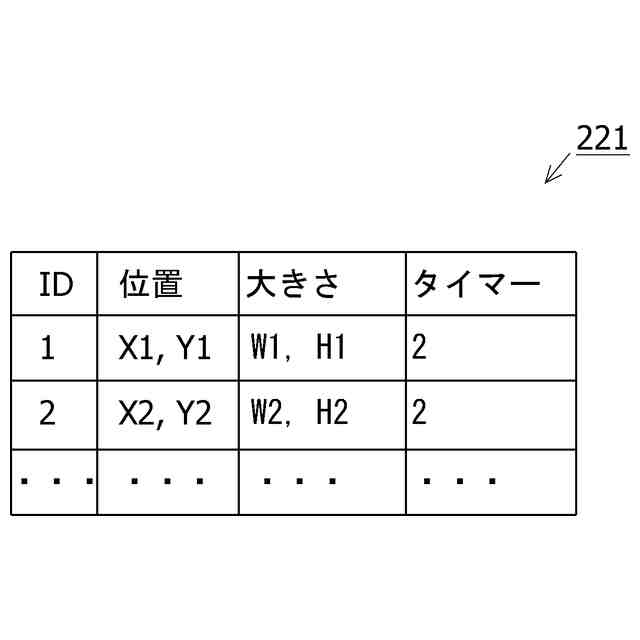
前記第1のフレーム画像から抽出された前記オブジェクトの第1の位置を検出するとともに、前記オブジェクトに対応付けたタイマーを設定する処理と、
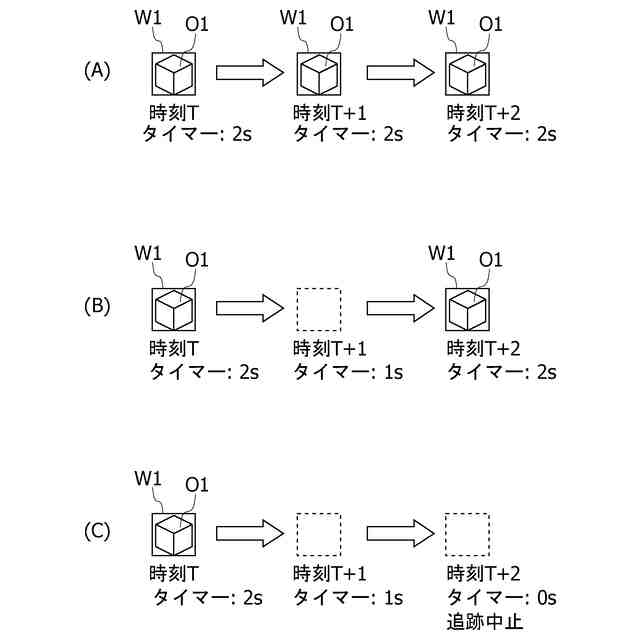
前記第1のフレーム画像の後に取得された第2のフレーム画像において前記第1の位置に前記オブジェクトが抽出されない場合には、前記タイマーを進める処理と、
前記タイマーが満了するまでの間は、前記オブジェクトの追跡を継続する処理と、を実行する制御部を備える、
画像処理装置。
続きを表示(約 1,800 文字)
【請求項2】
前記タイマーを進める処理は、前記第2のフレーム画像の後に取得された第3のフレーム画像において、前記第1の位置に前記オブジェクトが抽出されると、前記タイマーをリセットする処理を含む、
請求項1に記載の画像処理装置。
【請求項3】
前記制御部は、
前記タイマーが設定されると、前記オブジェクトの追跡を開始し、
前記タイマーが満了すると、前記オブジェクトの追跡を終了し、
前記オブジェクトの追跡が所定時間以上継続された場合、前記オブジェクトが前記道路上に存在することを発報する処理をさらに実行する、
請求項1に記載の画像処理装置。
【請求項4】
前記制御部は、
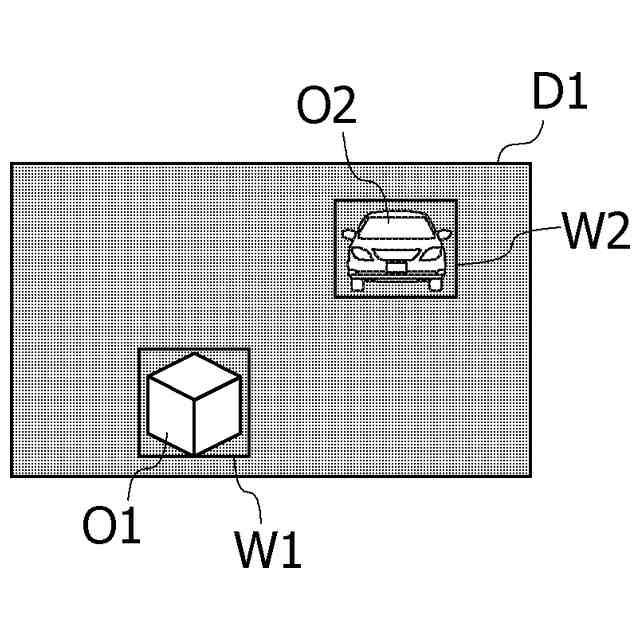
前記第1のフレーム画像から抽出された前記オブジェクトに対し、前記動画上における前記オブジェクトの位置の追跡に用いる枠を設定し、
前記第2のフレーム画像において、前記枠に少なくとも一部が重畳する位置に検出された他のオブジェクトを形成するピクセルのうち第1の閾値以上の数のピクセルが前記枠と重畳して存在する場合には、前記タイマーを進める処理の実行を抑制する、
請求項1に記載の画像処理装置。
【請求項5】
前記制御部は、
前記第1のフレーム画像から抽出された前記オブジェクトに対し、前記動画上における前記オブジェクトの位置の追跡に用いる枠を設定し、
前記第2のフレーム画像において、前記枠に少なくとも一部が重畳する位置に検出された他のオブジェクトを形成するピクセルのうち第1の閾値以上の数のピクセルが前記第1のフレーム画像において前記オブジェクトが存在した位置に重畳して存在する場合には、前記タイマーを進める処理の実行を抑制する、
請求項1に記載の画像処理装置。
【請求項6】
前記制御部は、
前記第1のフレーム画像から抽出された前記オブジェクトに対し、前記動画上における前記オブジェクトの位置の追跡に用いる枠を設定し、
前記第2のフレーム画像において、前記枠に少なくとも一部が重畳する位置に検出された他のオブジェクトの大きさが第2の閾値以上である場合には、前記タイマーを進める処理の実行を抑制する、
請求項1に記載の画像処理装置。
【請求項7】
前記制御部は、
前記枠を用いて前記オブジェクトを追跡する継続時間を示す第2のタイマーを前記枠に対応付けて設定する処理と、
前記第2のフレーム画像において前記枠を設定した位置に前記オブジェクトが抽出される場合には、前記第2のタイマーを進める処理と、を実行し、
前記抑制することは、前記第2のタイマーが第3の閾値以上の場合に実行される、
請求項4に記載の画像処理装置。
【請求項8】
カメラによって道路が撮影された動画の第1のフレーム画像を取得する処理と、
前記第1のフレーム画像から前記道路上のオブジェクトを抽出する処理と、
前記第1のフレーム画像から抽出された前記オブジェクトの第1の位置を検出するとともに、前記オブジェクトに対応付けたタイマーを設定する処理と、
前記第1のフレーム画像の後に取得された第2のフレーム画像において前記第1の位置に前記オブジェクトが抽出されない場合には、前記タイマーを進める処理と、
前記タイマーが満了するまでの間は、前記オブジェクトの追跡を継続する処理と、をコンピュータが実行する、
画像処理方法。
【請求項9】
カメラによって道路が撮影された動画の第1のフレーム画像を取得する処理と、
前記第1のフレーム画像から前記道路上のオブジェクトを抽出する処理と、
前記第1のフレーム画像から抽出された前記オブジェクトの第1の位置を検出するとともに、前記オブジェクトに対応付けたタイマーを設定する処理と、
前記第1のフレーム画像の後に取得された第2のフレーム画像において前記第1の位置に前記オブジェクトが抽出されない場合には、前記タイマーを進める処理と、
前記タイマーが満了するまでの間は、前記オブジェクトの追跡を継続する処理と、をコンピュータに実行させる、
画像処理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置、画像処理方法及び画像処理プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
カメラによって撮影した動画中のフレーム画像からオブジェクトを検出し、検出したオブジェクトを追跡する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2014-206934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来では、オブジェクトに設定されたトラッキング枠のフレーム間における重なり具合や位置関係を基に、オブジェクトの追跡が行われる。そのため、追跡中のオブジェクトとカメラとの間に遮蔽物が映り込む場合や、照明の点灯や太陽光のハレーション等による明暗の急な変動が生じた場合等によって、フレーム画像からオブジェクトが一時的に検出されなくなると、オブジェクトの追跡に失敗することがある。
【0005】
開示の技術の1つの側面は、一時的にオブジェクトが検出されなくなってもオブジェクトの追跡を継続できる画像処理装置、画像処理方法及び画像処理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
開示の技術の1つの側面は、次のような画像処理装置によって例示される。本画像処理装置は、カメラによって道路が撮影された動画の第1のフレーム画像を取得する処理と、上記第1のフレーム画像から上記道路上のオブジェクトを抽出する処理と、上記第1のフレーム画像から抽出された上記オブジェクトの第1の位置を検出するとともに、上記オブジェクトに対応付けたタイマーを設定する処理と、上記第1のフレーム画像の後に取得された第2のフレーム画像において上記第1の位置に上記オブジェクトが抽出されない場合には、上記タイマーを進める処理と、上記タイマーが満了するまでの間は、上記オブジェクトの追跡を継続する処理と、を実行する制御部を備える。
【0007】
上記構成を有する画像処理装置であれば、上記オブジェクトがフレーム画像中に検出されなくなっても、上記タイマーが満了するまでの間は上記オブジェクトの追跡を継続できる。そのため、本画像処理装置によれば、一時的に上記オブジェクトが検出されなくなっても上記オブジェクトの追跡を継続できる。ここで、上記制御部は、前記タイマーが満了すると前記枠を用いた前記オブジェクトの追跡を中止してもよい。
【0008】
本画像処理装置は、次の特徴をさらに備えてもよい。上記タイマーを進める処理は、上記第2のフレーム画像の後に取得された第3のフレーム画像において、上記第1の位置に上記オブジェクトが抽出されると、上記タイマーをリセットする処理を含む。本画像処理装置は、このような特徴を備えることで、上記カメラと上記オブジェクトとの間を遮蔽物が複数回に渡って通過するような場合であっても、遮蔽物の通過後には上記タイマーがリセットされるため、上記オブジェクトの追跡を継続できる。
【0009】
本画像処理装置は、次の特徴をさらに備えてもよい。上記制御部は、上記タイマーが設
定されると、上記オブジェクトの追跡を開始し、上記タイマーが満了すると、上記オブジェクトの追跡を終了し、上記オブジェクトの追跡が所定時間以上継続された場合、上記オブジェクトが上記道路上に存在することを発報する処理をさらに実行する。上記タイマーが満了するまでの間に上記オブジェクトが所定時間以上継続して追跡される場合、上記オブジェクトは上記道路上で移動しない物体であると考えらえる。本画像処理装置は、このような特徴を備えることで、道路上で移動しないことから車両の走行を妨げる虞のあるオブジェクトの存在を発報できる。
【0010】
本画像処理装置は、次の特徴をさらに備えてもよい。上記制御部は、上記第1のフレーム画像から抽出された上記オブジェクトに対し、上記動画上における上記オブジェクトの位置の追跡に用いる枠を設定し、上記第2のフレーム画像において、上記枠に少なくとも一部が重畳する位置に検出された他のオブジェクトを形成するピクセルのうち第1の閾値以上の数のピクセルが上記枠と重畳して存在する場合には、上記タイマーを進める処理の実行を抑制する。他のオブジェクトを形成するピクセルのうち上記枠と重畳するピクセル数が上記第1の閾値未満の場合、上記他のオブジェクトの背後に上記オブジェクトが隠れる可能性は低いため、上記オブジェクトは既に移動したとも考えられる。本画像処理装置は、このような特徴を備えることで、上記オブジェクトが既に移動したとも考えられる場合にはタイマーを進める処理を実行することで追跡を終了に近づけることができる。また、上記オブジェクトが未だ移動していないと考えられる場合にはタイマーを進める処理が抑制されることで、上記オブジェクトの追跡を継続できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
6日前
オムロン株式会社
電源回路
6日前
オムロン株式会社
電源回路
6日前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
情報提供装置
2日前
オムロン株式会社
スレーブ装置
2日前
オムロン株式会社
トリガスイッチ
2日前
オムロン株式会社
IOターミナル
2日前
オムロン株式会社
端子折り曲げ治具
2日前
オムロン株式会社
モータの監視装置
2日前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
セーフティデバイス
2日前
オムロン株式会社
電力開閉モジュール
2日前
オムロン株式会社
システムおよび方法
2日前
オムロン株式会社
リモート安全入出力装置
2日前
オムロン株式会社
支援システム及び支援方法
2日前
オムロン株式会社
保護継電器及び電力制御装置
2日前
オムロン株式会社
情報処理装置及び情報処理方法
12日前
オムロン株式会社
パワーコンディショナシステム
2日前
オムロン株式会社
給電モジュール及び給電システム
2日前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
電力供給システム及び電力制御装置
2日前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
計測装置、計測方法及びプログラム
2日前
オムロン株式会社
教育支援システム及び教育支援方法
2日前
オムロン株式会社
検査装置、検査方法およびプログラム
12日前
オムロン株式会社
画像処理システムおよび画像処理方法
1か月前
オムロン株式会社
交通管制システム、および動作切替方法
2日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
2日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
2日前
オムロン株式会社
安全IOターミナルおよび安全システム
2日前
オムロン株式会社
監視システム、警報方法、及びプログラム
2日前
オムロン株式会社
スレーブ装置およびネットワークシステム
2日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
1か月前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
28日前
オムロン株式会社
監視システム、点灯制御方法、及びプログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ