TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117389
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024012204
出願日
2024-01-30
発明の名称
搬送装置、搬送方法、プログラム
出願人
オムロン株式会社
,
オムロン キリンテクノシステム株式会社
代理人
個人
,
個人
,
個人
主分類
B65G
47/68 20060101AFI20250804BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】より容易に本流ラインにワークを戻すことが可能な搬送装置を提供する。
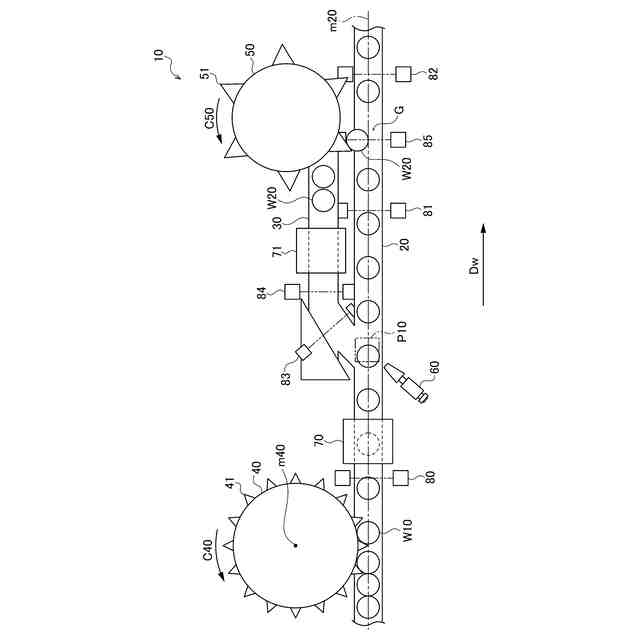
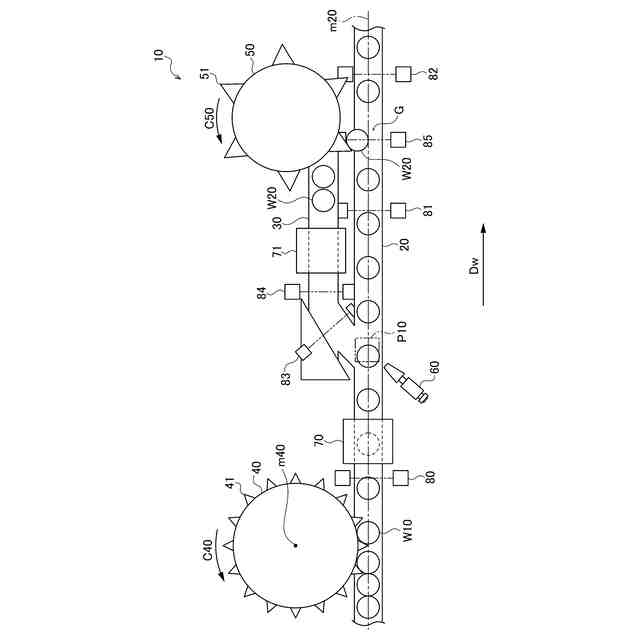
【解決手段】搬送装置10は、本流ライン20と、支流ライン30と、合流ホイール50と、制御装置とを備える。支流ライン30は、本流ライン20とは別に設けられる。合流ホイール50は、本流ライン20に配置されている合流ワークW20を本流ライン20に送り込む。制御装置は合流ホイール50を制御する。制御装置90は、本流ライン20を流れる2つのワークW10,W10の隙間が所定の条件を満たすとき、合流ワークW20が隙間に位置するように、支流ライン30から本流ライン20に合流ワークW20を移送する。
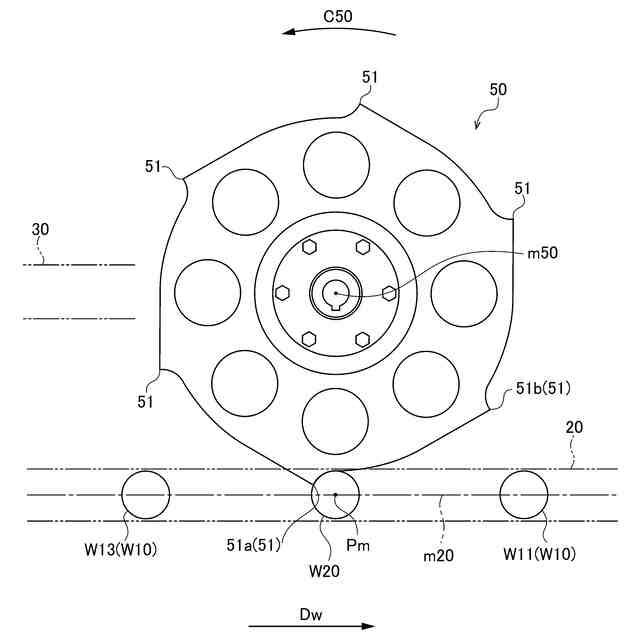
【選択図】図3
特許請求の範囲
【請求項1】
複数の対象物が所定の搬送方向に向かって流れる第1のラインと、
前記第1のラインとは別に設けられる第2のラインと、
前記第2のラインに配置されている第1の対象物を前記第1のラインに送り込む第1の移送部と、
前記第1の移送部を制御する制御部と、を備え、
前記制御部は、前記第1のラインを搬送されている前記複数の対象物のうち連続して搬送されている第2の対象物と第3の対象物との隙間が第1の条件を満たすとき、前記第1の対象物が前記隙間に位置するように、前記第2のラインから前記第1のラインに当該第1の対象物を移送する
搬送装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第1のラインを移動する前記複数の対象物のうち、第2の条件を満たす対象物を前記第2のラインに移送する第2の移送部をさらに備える
請求項1に記載の搬送装置。
【請求項3】
前記第1の移送部は回転動作により第1の対象物を前記第1のラインに送り込み、
前記制御部は前記第1の対象物が前記隙間に送り込まれるように前記第1の移送部を回転動作させる回転制御を実行する
請求項1に記載の搬送装置。
【請求項4】
前記第1の移送部は、円盤状に形成されており、
前記第1の移送部には、前記第1の対象物を把持することが可能な複数の把持部が形成されており、
前記複数の把持部のうち、前記隙間に送り込まれる前記第1の対象物を把持している把持部を対象把持部とし、前記対象把持部に対して前記第1の移送部の回転方向の前方に位置している把持部を先行把持部とするとともに、
前記第2の対象物は、前記第3の対象物に対して前記隙間を有して前記第1のラインの下流に配置される対象物であり、
前記制御部は、前記回転制御において、前記先行把持部が前記第2の対象物に接近するまで、前記第1の移送部を前記回転方向に加速するように回転動作させる加速制御を実行した後、前記対象把持部に把持されている前記第1の対象物が前記搬送方向において前記対象物と同じ速度で変位するように前記第1の移送部を回転動作させる同期制御を実行する
請求項3に記載の搬送装置。
【請求項5】
前記第1の移送部には、前記複数の把持部が周方向に所定の角度間隔で均等に形成されており、
前記制御部は、前記同期制御において、前記所定の角度間隔の2倍よりも大きい角度だけ前記第1の移送部を回転させる
請求項4に記載の搬送装置。
【請求項6】
前記制御部は、前記同期制御において、前記隙間に設定された目標挿入位置に前記第1の対象物が配置される直前に、前記搬送方向において前記対象物よりも速い速度で前記第1の対象物が変位するように前記第1の移送部を回転動作させる加速調整制御を実行する
請求項5に記載の搬送装置。
【請求項7】
前記制御部は、前記同期制御において、前記隙間に設定された目標挿入位置に前記第1の対象物が配置された直後に、前記搬送方向において前記対象物よりも遅い速度で前記第1の対象物が変位するように前記第1の移送部を回転動作させる減速調整制御を実行する
請求項5に記載の搬送装置。
【請求項8】
前記把持部は、前記第1の対象物に対して前記第1の移送部の回転方向とは逆の方向に係合する単一の係合爪により構成されている
請求項4に記載の搬送装置。
【請求項9】
前記係合爪において前記第1の対象物が接触する接触部分は、湾曲した形状を有しており、
前記係合爪において前記第1の対象物が接触する部分とは反対側の非接触部分は、前記接触部分よりも小さい曲率を有して湾曲した形状、又は直線状に形成されている
請求項8に記載の搬送装置。
【請求項10】
前記第1の移送部の外周に設けられて、前記第1の移送部の回転動作により前記第2のラインから前記第1のラインに向かう前記第1の対象物の移動をガイドする第1ガイド壁を更に備える
請求項8に記載の搬送装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置、搬送方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、下記の特許文献1に記載の装置がある。この特許文献1に記載の装置では、本流ラインを流れる製品を検査し欠陥が検出された場合、排出装置によって排出シュートに排出される。
【先行技術文献】
【特許文献】
【0003】
特開2012-112835号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の装置では、欠陥が検出された製品を再度検査し、良品であると再判定された場合に、本流ラインに戻すことができなかった。
本発明は、こうした実情に鑑みてなされたものであり、その目的は、より容易に本流ラインにワークを戻すことが可能な搬送装置、搬送方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0005】
上記課題を解決する搬送装置は、複数の対象物が所定の搬送方向に向かって流れる第1のラインと、第1のラインとは別に設けられる第2のラインと、第2のラインに配置されている第1の対象物を第1のラインに送り込む第1の移送部と、第1の移送部を制御する制御部と、を備える。制御部は、第1のラインを搬送されている複数の対象物のうち連続して搬送されている第2の対象物と第3の対象物との隙間が第1の条件を満たすとき、第1の対象物が隙間に位置するように、第2のラインから第1のラインに当該第1の対象物を移送する。
【0006】
上記課題を解決する搬送方法は、複数の対象物が所定の搬送方向に向かって流れる第1のラインに、第1のラインとは別に設けられる第2のラインに配置されている対象物を送り込む搬送方法であって、コンピュータが、第2のラインに配置されている第1の対象物を第1のラインに送り込む第1の移送部を制御し、第1のラインを搬送されている複数の対象物のうち連続して搬送されている第2の対象物と第3の対象物との隙間が第1の条件を満たすとき、第1の対象物が隙間に位置するように、第2のラインから第1のラインに当該第1の対象物を移送する。
【0007】
上記課題を解決するプログラムは、コンピュータを、複数のワークが所定の搬送方向に向かって流れる第1のラインに、第1のラインとは別に設けられる第2のラインに配置されている対象物を送り込むための制御装置として機能させるためのプログラムであって、コンピュータに、第2のラインに配置されている第1の対象物を第1のラインに送り込む第1の移送部を制御させ、第1のラインを搬送されている複数の対象物のうち連続して搬送されている第2の対象物と第3の対象物との隙間が第1の条件を満たすとき、第1の対象物が隙間に位置するように、第2のラインから第1のラインに当該第1の対象物を移送する。
【0008】
これらによれば、合流機構の回転動作により合流ワークを本流ラインに戻すことができるため、より容易に本流ラインにワークを戻すことが可能となる。
【発明の効果】
【0009】
本発明の搬送装置によれば、より容易に本流ラインにワークを戻すことが可能である。
【図面の簡単な説明】
【0010】
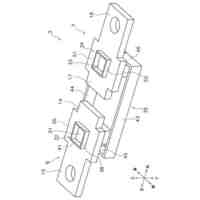
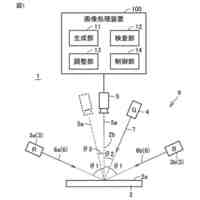
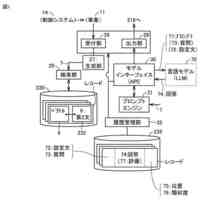
実施形態の搬送装置の概略構成を模式的に示す図。
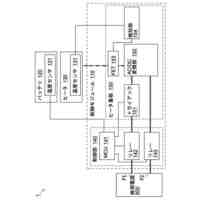
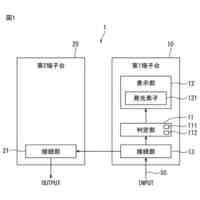
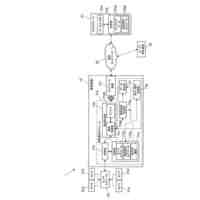
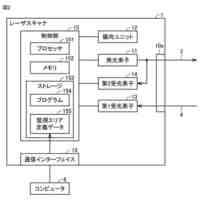
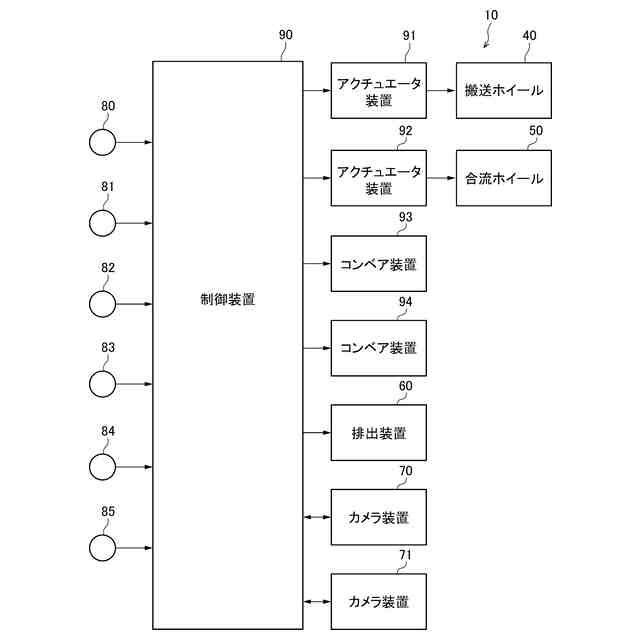
実施形態の搬送装置の電気的な構成を示すブロック図。
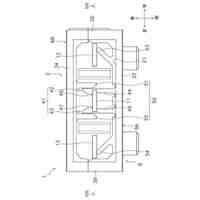
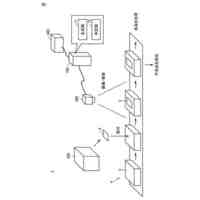
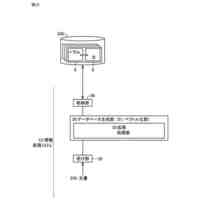
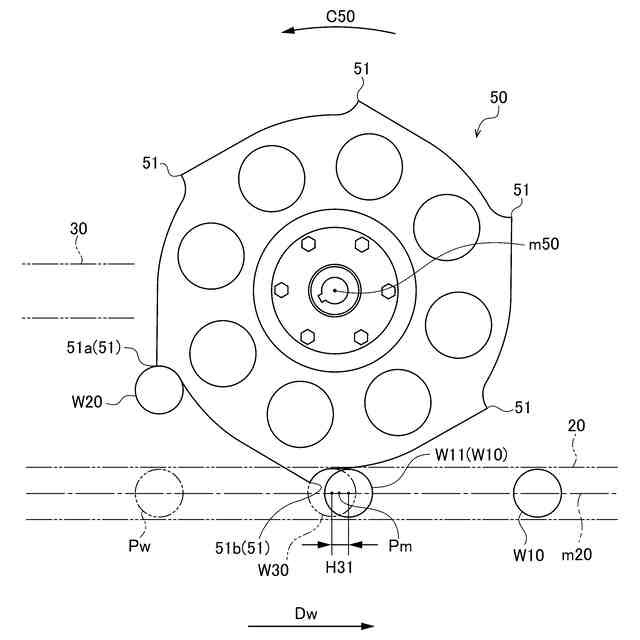
実施形態の搬送装置の動作例を模式的に示す図。
実施形態の搬送装置の合流ホイール周辺の平面構造を示す平面図。
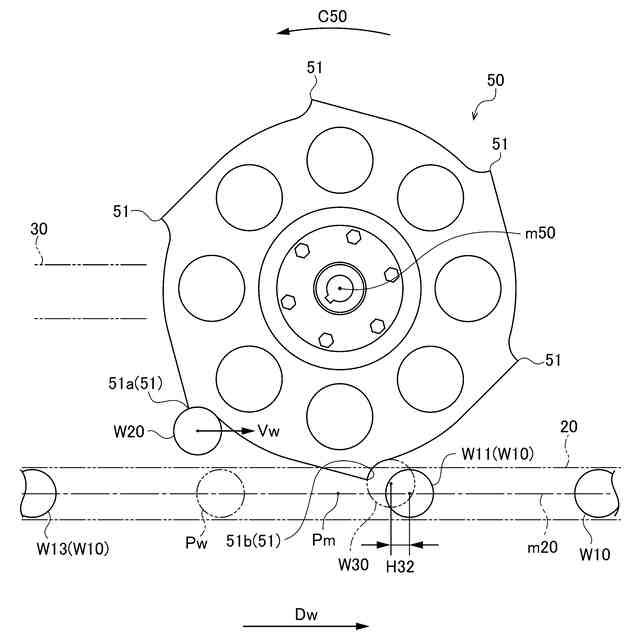
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の基準速度プロファイルの一例を示すグラフ。
実施形態の速度調整プロファイルの一例を示すグラフ。
実施形態の基準速度プロファイルの一例を示すグラフ。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の合流ホイールの動作例を模式的に示す図。
実施形態の基準速度プロファイルの一例を示すグラフ。
実施形態の基準速度プロファイルの一例を示すグラフ。
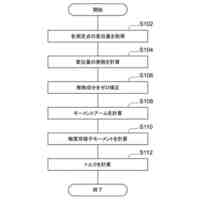
実施形態の制御装置により実行される処理の手順を示すフローチャート。
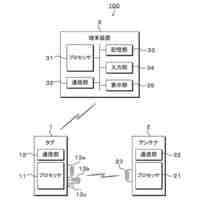
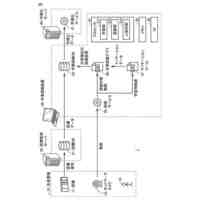
実施形態のコンピュータのハードウェア的な構成を示すブロック図。
実施形態の第1変形例の搬送装置の合流ホイール周辺の平面構造を示す平面図
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
実施形態の第2変形例の基準速度プロファイルの一例を示すグラフ。
(A)~(D)は、実施形態の第3変形例の基準速度プロファイルの一例をそれぞれ示すグラフ。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
3日前
オムロン株式会社
制御装置
1か月前
オムロン株式会社
電源回路
3日前
オムロン株式会社
ドライバ
2か月前
オムロン株式会社
電源回路
3日前
オムロン株式会社
電磁継電器
27日前
オムロン株式会社
電磁継電器
2か月前
オムロン株式会社
スイッチ装置
2か月前
オムロン株式会社
無停電電源装置
2か月前
オムロン株式会社
インバータ装置
2か月前
オムロン株式会社
シート検査装置
2か月前
オムロン株式会社
情報処理システム
2か月前
オムロン株式会社
スイッチング装置
2か月前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
電気機器ユニット
2か月前
オムロン株式会社
電気機器ユニット
2か月前
オムロン株式会社
処理方法、及び処理装置
2か月前
オムロン株式会社
端子台および端子台セット
2か月前
オムロン株式会社
充電システム及びモジュール
2か月前
オムロン株式会社
情報処理装置及び情報処理方法
9日前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
トルク推定方法及びトルク推定装置
1か月前
オムロン株式会社
画像処理システムおよび画像処理方法
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
2か月前
オムロン株式会社
非接触給電システム及びその制御方法
1か月前
オムロン株式会社
検査装置、検査方法およびプログラム
9日前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
安全監視装置、制御方法およびプログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
2か月前
オムロン株式会社
充電器、電力開閉モジュール、充電システム
2か月前
オムロン株式会社
外装ケースユニット、外装ケース及び電気設備
2か月前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
1か月前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
25日前
オムロン株式会社
培地監視装置、培地監視方法、及びプログラム
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ