TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139913
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039000
出願日
2024-03-13
発明の名称
モータの監視装置
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02P
29/10 20160101AFI20250919BHJP(電力の発電,変換,配電)
要約
【課題】好適なモータの速度監視のための技術を提供する。
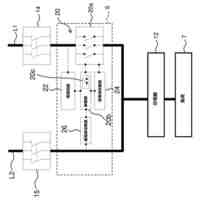
【解決手段】制御装置により駆動制御されるモータの速度を、該制御装置とは別に監視する監視装置であって、モータの駆動電流を検出し、該駆動電流に基づく電流ベクトルの位相変化に応じて、該モータの第1速度を算出する第1算出部と、モータにおける誘起電圧を所定のオブザーバ処理を介して算出し、該誘起電圧に基づく電圧ベクトルの位相変化に応じて、該モータの第2速度を算出する第2算出部と、モータの運転状態に基づいて、第1算出部により算出される第1速度と第2算出部により算出される第2速度の何れか一方を選択して、該運転状態におけるモータの推定速度として出力する出力部と、を備える。
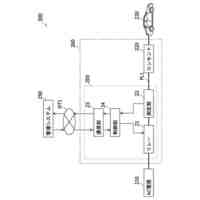
【選択図】図8
特許請求の範囲
【請求項1】
制御装置により駆動制御されるモータの速度を、該制御装置とは別に監視する監視装置であって、
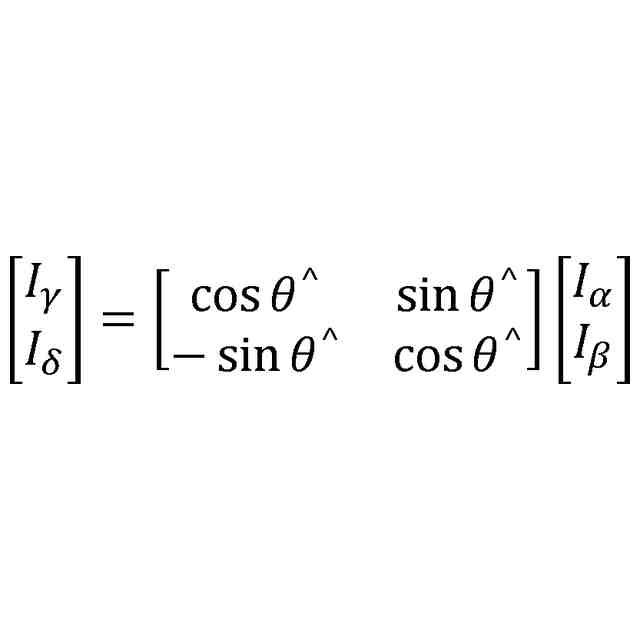
前記モータの駆動電流を検出し、該駆動電流に基づく電流ベクトルの位相変化に応じて、該モータの第1速度を算出する第1算出部と、
前記モータにおける誘起電圧を所定のオブザーバ処理を介して算出し、該誘起電圧に基づく電圧ベクトルの位相変化に応じて、該モータの第2速度を算出する第2算出部と、
前記モータの運転状態に基づいて、前記第1算出部により算出される前記第1速度と前記第2算出部により算出される前記第2速度の何れか一方を選択して、該運転状態における前記モータの推定速度として出力する出力部と、
を備える、モータの監視装置。
続きを表示(約 1,500 文字)
【請求項2】
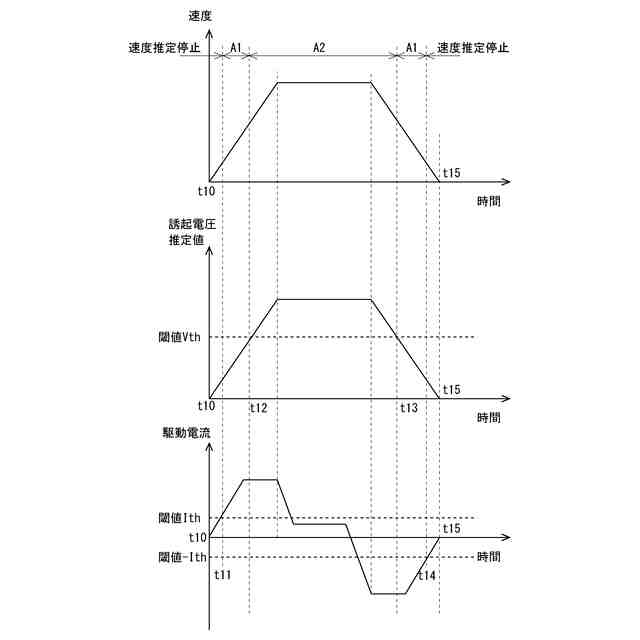
前記出力部は、前記モータの駆動電流が第1基準値を越えたときに前記第1速度を前記推定速度として出力可能となるように構成され、
更に、前記出力部は、前記モータにおける誘起電圧が第2基準値を越えたときに前記第2速度を前記推定速度として出力可能となるように構成され、
前記第1基準値及び前記第2基準値は、前記第1速度の出力が可能とされる前記モータの速度が、前記第2速度の出力が可能とされる前記モータの速度よりも低速側の速度となるように設定される、
請求項1に記載のモータの監視装置。
【請求項3】
前記出力部は、前記モータが停止状態から駆動を開始したとき、前記モータの駆動電流が第1基準値を越えるまでは、前記推定速度の出力は実行しない、
請求項2に記載のモータの監視装置。
【請求項4】
前記出力部は、前記モータが停止状態から駆動を開始したとき、前記モータの駆動電流が第1基準値を越え、且つ、前記モータにおける誘起電圧が前記第2基準値を越えていないときは、前記出力部は、前記第1速度を前記推定速度として出力する、
請求項2に記載のモータの監視装置。
【請求項5】
前記モータの駆動電流が第1基準値を越え、且つ、該モータにおける誘起電圧が前記第2基準値を越えたとき、前記出力部は、前記第2速度を前記推定速度として出力する、
請求項4に記載のモータの監視装置。
【請求項6】
前記出力部による前記推定速度の出力が開始された後に、前記モータの駆動電流が前記第1基準値を越えておらず、且つ、該モータにおける誘起電圧が前記第2基準値を越えていない所定状態が生じているときは、前記出力部は、前記第1速度及び前記第2速度に代えて、該所定状態の開始時点における前記モータの速度から、該所定状態の継続時間に応じて減算された第3速度を、前記推定速度として出力する、
請求項2に記載のモータの監視装置。
【請求項7】
前記出力部による前記推定速度の出力が開始された後に、前記モータの駆動電流が前記第1基準値を越えておらず、且つ、該モータにおける誘起電圧が前記第2基準値を越えているときは、前記出力部は、前記第2速度を前記モータの前記推定速度として出力する、
請求項2に記載のモータの監視装置。
【請求項8】
前記出力部は、
前記モータの運転状態に基づいて、前記第1速度と前記第2速度の何れか一方を選択する選択部と、
所定の積分処理を実行する積分器を含み、前記選択部による選択結果に対して該積分器を介してPI制御処理を実行して前記推定速度を算出するPI制御処理部と、
を有する、
請求項1から請求項7の何れか1項に記載のモータの監視装置。
【請求項9】
前記PI制御処理において設定されるゲインについて、前記推定速度が高い場合の該ゲインは、該推定速度が低い場合の該ゲインと比べて高くなるように設定される、
請求項8に記載のモータの監視装置。
【請求項10】
前記第1算出部は、前記モータの駆動電流の検出結果に対して設けられるローパスフィルタを有し、該ローパスフィルタの時定数は、前記第2算出部で実行される前記所定のオブザーバ処理に関連する遅れ時間に対応するように設定され、
前記第1算出部は、前記ローパスフィルタを経て得られる前記電流ベクトルの位相変化に応じて前記第1速度を算出する、
請求項1から請求項7の何れか1項に記載のモータの監視装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータの速度を監視する監視装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
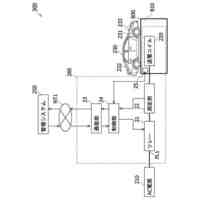
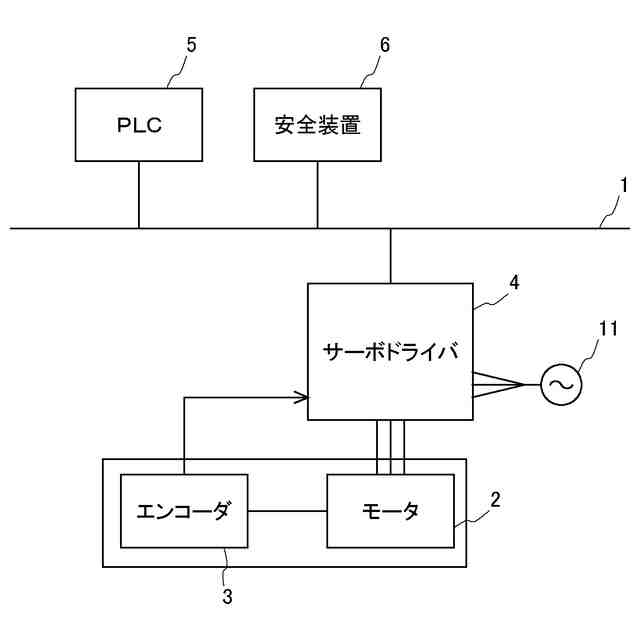
近年、モータへの電力供給を行う電力変換装置は、国際標準規格などの機能安全規格に対応することが求められている。特に、機能安全規格の中の一つである安全速度制限への対応が求められている。安全速度制限は、規定速度制限値を越えないことを監視する機能である。かかる安全速度制限に対応した電力変換装置では、モータの速度が規定速度制限値を越えた場合、電力変換装置からモータへの電力供給を遮断することで、モータを停止させて安全性を確保する。
【0003】
モータの速度監視に関し、エンコーダ等の外部検出器を用いずに当該モータの速度を監視する従来技術として、モータの駆動電流を電流センサで検出し、その検出値に基づいてモータの速度監視を行う技術が開発されてきている。例えば、特許文献1に示す例では、電流センサによるモータの駆動電流の検出値に対して半波整流処理を施し、その半波整流された電流信号の立ち上がりタイミングと立ち下がりタイミングとを利用することで電流周波数を算出し、以てモータの速度を監視する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許6704560号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術のように半波整流された電流信号の立ち上がりタイミングと立ち下がりタイミングとを利用する場合、当該電流信号が相対的に小さくなってしまうとその立ち上がりタイミング等を好適に検出することが困難となり、特にノイズの影響を受けやすくなり誤った立ち上がりタイミング等の検出が生じやすくなる。例えば、モータが、外部の機械的要素から受ける摩擦力等の影響によって相対的に緩やかに減速するような場合、モータの駆動電流そのものは小さいため、結果として、上記半波整流された電流信号の立ち上がりタイミング等が検出しにくくなり、以て、モータの速度監視が困難となり得る。
【0006】
また、モータの速度監視のために、半波整流された電流信号の立ち上がりタイミングと立ち下がりタイミングとを利用して電流周波数を算出するため、モータの速度を算出、推定するのに要する時間が比較的長くなってしまう。特に、モータの速度が低くなるほど当該電流信号の周期は長くなり、モータの速度監視が難しくなる。このような傾向は、機能安全規格への対応の観点から好ましいものではない。
【0007】
本願開示は、このような問題に鑑みてなされたものであり、好適なモータの速度監視のための技術を提供すること、特に、機能安全規格への好適な対応を実現する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
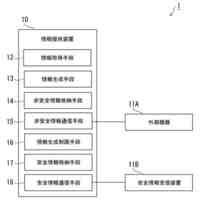
本願開示の一側面に係るモータの監視装置は、制御装置により駆動制御されるモータの速度を、該制御装置とは別に監視する監視装置であって、前記モータの駆動電流を検出し、該駆動電流に基づく電流ベクトルの位相変化に応じて、該モータの第1速度を算出する第1算出部と、前記モータにおける誘起電圧を所定のオブザーバ処理を介して算出し、該
誘起電圧に基づく電圧ベクトルの位相変化に応じて、該モータの第2速度を算出する第2算出部と、前記モータの運転状態に基づいて、前記第1算出部により算出される前記第1速度と前記第2算出部により算出される前記第2速度の何れか一方を選択して、該運転状態における前記モータの推定速度として出力する出力部と、を備える。
【0009】
上記モータの監視装置は、第1算出部による第1速度の算出と、第2算出部による第2速度の算出の2つの算出形態を有する。ここで、前者については、モータの駆動電流に基づく電流ベクトルの位相変化を用いて、モータの速度(第1速度)の算出を行う。このように電流ベクトルの位相変化を利用することで、モータの速度にかかわらず安定的に且つ速やかな速度監視が可能となる。一方で、モータの駆動電流そのものが小さい場合には、電流ベクトルの位相を正確に算出することが容易ではない場合も有り得る。また、後者については、所定のオブザーバ処理によって算出された、モータにおける誘起電圧に基づく電圧ベクトルの位相変化を用いて、モータの速度(第2速度)の算出を行う。このようにオブザーバ処理を介した電圧ベクトルの位相を利用することで、モータの駆動電流が小さくなる場合でもモータ速度の監視が実現され得る。すなわち、モータの速度監視に関し、第1算出部と第2算出部とは相補的な関係を有している。
【0010】
そこで、出力部は、モータの運転状態に基づいて、第1算出部により算出される第1速度と第2算出部により算出される第2速度の何れか一方を選択する。すなわち、モータの運転状態によっては、第1速度と第2速度のうちいずれが、実際のモータの速度に近接した値となっているかが変化することを考慮し、出力部はより好適な推定速度が得られるように、モータの運転状態に基づいた上記選択を実行するように構成される。例えば、オブザーバ処理の結果生じる、実際のモータ速度と第2速度との間の乖離と、実際のモータ速度と第1速度との乖離との違いを踏まえて、出力部は、第1速度と第2速度とのいずれかを選択し、そのモータの運転状態に、より好適に適した推定速度として出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
5日前
オムロン株式会社
電源回路
5日前
オムロン株式会社
電源回路
5日前
オムロン株式会社
電磁継電器
29日前
オムロン株式会社
情報提供装置
1日前
オムロン株式会社
スレーブ装置
1日前
オムロン株式会社
トリガスイッチ
1日前
オムロン株式会社
IOターミナル
1日前
オムロン株式会社
モータの監視装置
1日前
オムロン株式会社
端子折り曲げ治具
1日前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
電力開閉モジュール
1日前
オムロン株式会社
セーフティデバイス
1日前
オムロン株式会社
システムおよび方法
1日前
オムロン株式会社
リモート安全入出力装置
1日前
オムロン株式会社
支援システム及び支援方法
1日前
オムロン株式会社
保護継電器及び電力制御装置
1日前
オムロン株式会社
情報処理装置及び情報処理方法
11日前
オムロン株式会社
パワーコンディショナシステム
1日前
オムロン株式会社
給電モジュール及び給電システム
1日前
オムロン株式会社
教育支援システム及び教育支援方法
1日前
オムロン株式会社
計測装置、計測方法及びプログラム
1日前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
電力供給システム及び電力制御装置
1日前
オムロン株式会社
検査装置、検査方法およびプログラム
11日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
1日前
オムロン株式会社
安全IOターミナルおよび安全システム
1日前
オムロン株式会社
交通管制システム、および動作切替方法
1日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
1日前
オムロン株式会社
監視システム、警報方法、及びプログラム
1日前
オムロン株式会社
スレーブ装置およびネットワークシステム
1日前
オムロン株式会社
監視システム、点灯制御方法、及びプログラム
1日前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
27日前
オムロン株式会社
サーボドライバ及びサーボドライバの調整方法
1日前
オムロン株式会社
開閉装置、及び開閉装置を備える蓄電池システム
1日前
オムロン株式会社
情報処理システム、情報処理方法及びプログラム
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ