TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025160553
公報種別
公開特許公報(A)
公開日
2025-10-23
出願番号
2024063122
出願日
2024-04-10
発明の名称
無人搬送のシステム、方法、プログラムおよび無人搬送車
出願人
日本ケミコン株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/242 20240101AFI20251016BHJP(制御;調整)
要約
【課題】無人搬送車の走行制御において、走行方向と異なる情報を除いて走行方向に無人搬送車を制御し、走行の信頼性を高める。
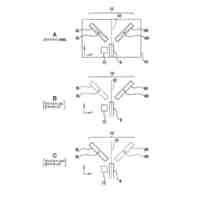
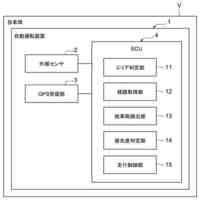
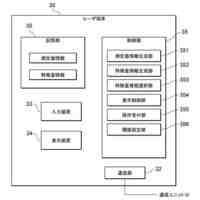
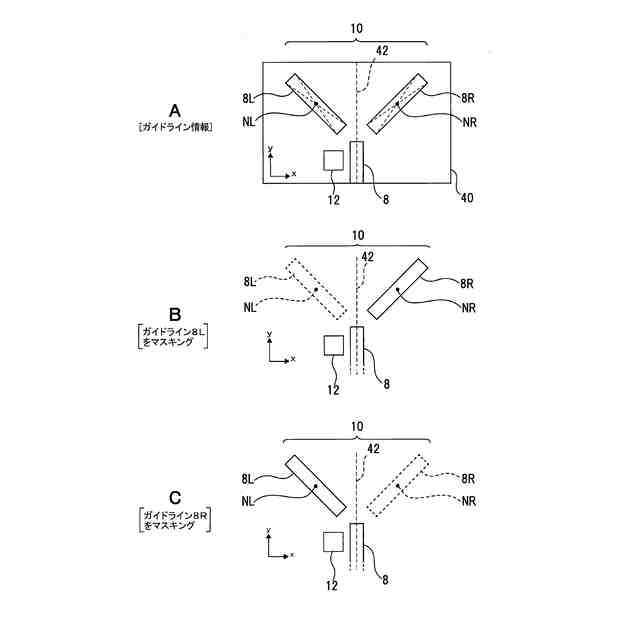
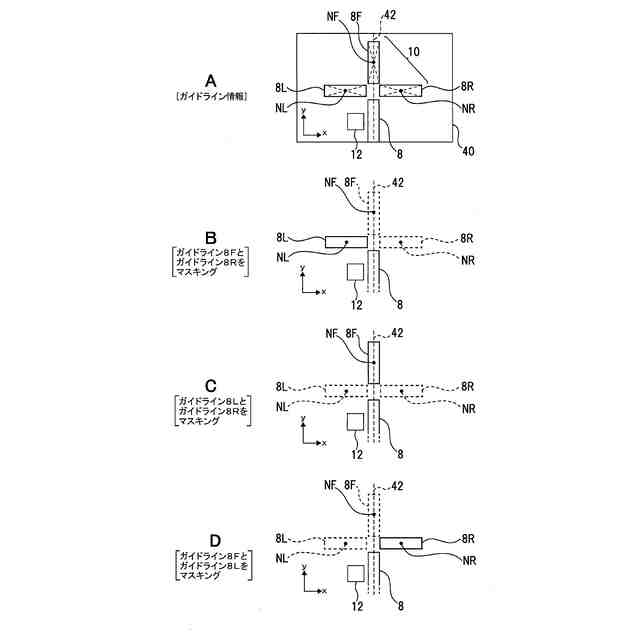
【解決手段】ガイドラインを辿って走行する無人搬送車(6)と、無人搬送車の走行方向を選択すべき分岐部(10)を含むガイドライン情報を取得するガイドライン情報取得部(カメラ18)と、無人搬送車が分岐部に入る前、無人搬送車に走行方向を指定する指示情報を取得させ、ガイドライン情報に含まれる走行方向と異なる情報をマスキングし、無人搬送車を走行方向に制御する制御部(24)とを含む。
【選択図】 図2
特許請求の範囲
【請求項1】
ガイドラインを辿って走行する無人搬送車と、
前記無人搬送車の走行方向を選択すべき分岐部を含むガイドライン情報を取得するガイドライン情報取得部と、
前記無人搬送車が前記分岐部に入る前、前記無人搬送車に前記走行方向を指定する指示情報を取得させ、前記ガイドライン情報に含まれる前記走行方向と異なる情報をマスキングし、前記無人搬送車を前記走行方向に制御する制御部と、
を含む、無人搬送システム。
続きを表示(約 1,600 文字)
【請求項2】
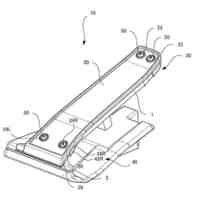
前記無人搬送車は、前記分岐部を含む前記ガイドラインを撮像して前記ガイドライン情報を取得するカメラを備え、
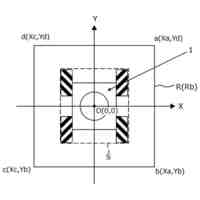
前記制御部は、前記ガイドライン情報で特定される複数の前記ガイドラインを識別する識別値を演算し、各識別値によりマスキングすべき前記走行方向と異なる情報を判断する、請求項1に記載の無人搬送システム。
【請求項3】
前記ガイドラインの前記分岐部の手前に、前記無人搬送車に対して前記走行方向を指示する前記指示情報を提示する標識を設置し、前記制御部は、前記標識から取得した前記指示情報により前記走行方向と異なる情報をマスキングする、請求項1または請求項2に記載の無人搬送システム。
【請求項4】
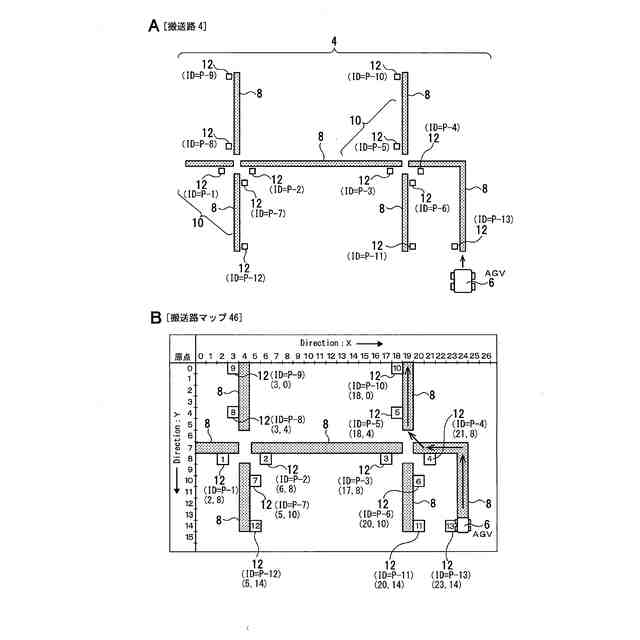
前記無人搬送車の走行経路を表す経路情報を送出するホスト装置を含み、前記制御部が前記経路情報に沿って前記ガイドライン情報を取得し、前記指示情報に含まれる前記走行方向と異なる情報をマスキングし、前記指示情報が示す前記走行方向に前記無人搬送車を制御する、請求項1に記載の無人搬送システム。
【請求項5】
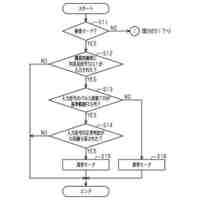
ガイドラインを辿って無人搬送車を走行させる工程と、
ガイドライン情報取得部が、前記無人搬送車の走行方向を選択すべき分岐部を含むガイドライン情報を取得する工程と、
前記無人搬送車が前記分岐部に入る前、制御部が、前記走行方向を指定する指示情報を取得して前記ガイドライン情報に含まれる前記走行方向と異なる情報をマスキングし、前記走行方向に前記無人搬送車を制御する工程と、
を含む、無人搬送方法。
【請求項6】
ホスト装置が前記無人搬送車の走行経路を表す経路情報を送出する工程と、
前記制御部が前記経路情報に沿って前記ガイドライン情報を取得し、前記指示情報に含まれる前記走行方向と異なる情報をマスキングし、前記指示情報が示す前記走行方向に前記無人搬送車を制御する工程と、
を含む、請求項5に記載の無人搬送方法。
【請求項7】
コンピュータに実行させるプログラムであって、
ガイドラインを辿って無人搬送車を走行させる機能と、
前記無人搬送車の走行方向を選択すべき分岐部を含むガイドライン情報を取得する機能と、
前記分岐部に入る前、前記無人搬送車に前記走行方向を指定する指示情報を取得させ、前記ガイドライン情報に含まれる前記走行方向と異なる情報をマスキングし、前記走行方向に前記無人搬送車を制御する機能と、
を前記コンピュータに実行させるためのプログラム。
【請求項8】
前記ガイドライン情報に含まれる複数の前記ガイドラインを識別する識別値を演算し、各識別値の位置によりマスキングすべき前記走行方向と異なる情報を判断する機能を含む、請求項7に記載のプログラム。
【請求項9】
ホスト装置が前記無人搬送車の走行経路を表す経路情報を送出する機能と、
前記ホスト装置から取得した前記経路情報に沿って前記ガイドライン情報を取得し、前記指示情報に含まれる前記走行方向と異なる情報をマスキングし、前記指示情報が示す前記走行方向に前記無人搬送車を制御する機能と、
を含む、請求項7に記載のプログラム。
【請求項10】
ガイドラインを辿って走行する無人搬送車であって、
走行方向を選択すべき分岐部を含むガイドライン情報を取得するガイドライン情報取得部と、
前記分岐部に入る前、前記走行方向を指定する指示情報を取得し、前記ガイドライン情報に含まれる前記走行方向と異なる情報をマスキングし、前記走行方向に制御する制御部と、
を含む、無人搬送車。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送車が走行線(以下、「ガイドライン」と称する)を辿って走行する無人搬送システム、その方法およびプログラムなどに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
多量の物品を扱う工場や倉庫などで各種搬送に無人搬送車を用いる無人搬送システムが普及している。この無人搬送システムでは、無人搬送車の走行路にガイドラインを敷設し、このガイドラインを辿って無人搬送車を走行させる方式が一般的である。
【0003】
このようなガイドラインを用いる無人搬送に関し、ガイドライン情報を画像で取得し、ガイドラインの輪郭のなす角度により無人搬送車の走行方向を特定することが知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2015-210761号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
無人搬送車による搬送先が多岐に亘る場合、走行ルートが複雑化するとともに、走行方向を選択すべきY字路、T字路、十字路などの分岐部が必要である。この分岐部において、走行方向の選択や制御が無人搬送車の信頼性に影響する。
走行方向の指示や制御が緩慢であると、無人搬送車が立ち往生するなど、無人搬送車の実用性や利便性が損なわれる。
【0006】
そして、走行方向の制御処理に誤差情報が含まれてしまうと、無人搬送車を立ち往生させるなどの不都合を生じるという課題がある。
【0007】
これに対し、本件発明者は、走行方向と異なる情報を除けば、走行方向とは異なる方向へ無人搬送車を走行させる不都合はなく、仮に誤って正規の情報が削除されてもさほどの不都合は生じないとの知見を得た。
【0008】
そこで、本開示の目的は、無人搬送車の走行制御において、走行方向と異なる情報を除いて走行方向に無人搬送車を制御し、走行の信頼性を高めることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本開示の無人搬送システムの一側面によれば、ガイドラインを辿って走行する無人搬送車と、前記無人搬送車の走行方向を選択すべき分岐部を含むガイドライン情報を取得するガイドライン情報取得部と、前記無人搬送車が前記分岐部に入る前、前記無人搬送車に前記走行方向を指定する指示情報を取得させ、前記ガイドライン情報に含まれる前記走行方向と異なる情報をマスキングし、前記無人搬送車を前記走行方向に制御する制御部とを含む。
【0010】
この無人搬送システムにおいて、前記無人搬送車は、前記分岐部を含む前記ガイドラインを撮像して前記ガイドライン情報を取得するカメラを備え、前記制御部は、前記ガイドライン情報で特定される複数の前記ガイドラインを識別する識別値を演算し、各識別値によりマスキングすべき前記走行方向と異なる情報を判断してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本ケミコン株式会社
固体電解コンデンサ及び製造方法
14日前
日本ケミコン株式会社
無人搬送のシステム、方法、プログラムおよび無人搬送車
8日前
日本ケミコン株式会社
固体電解コンデンサ用モノマー、固体電解コンデンサ及び製造方法
7日前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
ローム株式会社
基準電圧源
1か月前
株式会社熊谷組
障害物の検出方法
23日前
愛知製鋼株式会社
車両用システム
2か月前
株式会社クボタ
作業車
1日前
新電元工業株式会社
作業用ロボット
21日前
豊田合成株式会社
機器制御装置
28日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
17日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
カヤバ株式会社
減圧弁
1か月前
株式会社ダイフク
物品搬送設備
2日前
トヨタ自動車株式会社
制御装置
1か月前
キヤノン株式会社
配送システム
1か月前
株式会社アマダ
工作機械制御装置
22日前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
株式会社TMEIC
安全性診断装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
村田機械株式会社
搬送車システム
22日前
日野自動車株式会社
自動運転装置
22日前
ローム株式会社
電源回路用の電子負荷装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社カーメイト
アクセルペダルカバー
28日前
オムロン株式会社
システム及び方法
3日前
シンフォニアテクノロジー株式会社
自動走行車両
1か月前
株式会社明電舎
負荷制御装置
3日前
株式会社明電舎
負荷制御装置
3日前
株式会社明電舎
負荷制御装置
3日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ